 Preskočte na obsah
Preskočte na obsah What is the difference between a brushless motor and a brushed motor?
What is the difference between a synchronous motor and an asynchronous motor?
A čo indukčný motor s vinutým rotorom?
Sú všetky servomotory striedavé motory?
Sú všetky servomotory synchrónne motory?
Do stepper motors belong to DC motors or AC motors?
Je servomotor servomotor? ......
The sages once said: If knowledge is not systematic, what is the difference between it and a paragraph?
But the sage book on that long-winded text, that fanciful terminology, that plausible explanation, really look at people in the clouds.
Dlho som tiež hľadal na internete, nenašiel som systematickejšie vysvetlenie štruktúry elektromotorov a princípu klasifikácie, takže si dali veľa námahy s dotazom a usporiadaním kópie.
Tento článok sa snaží vysvetliť systematické znalosti v jednoduchom jazyku a používa veľa animácií a obrázkov na živé vyjadrenie nejasných vedomostí.
Due to my limited knowledge, it is inevitable that there are many mistakes, please correct the experts, please do not hesitate to give advice.
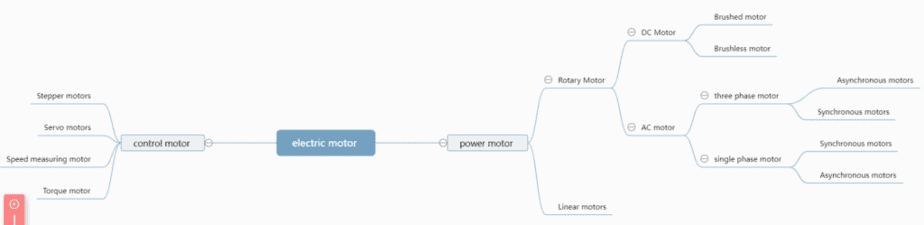
1. a diagram to explain the basic types of electric motors
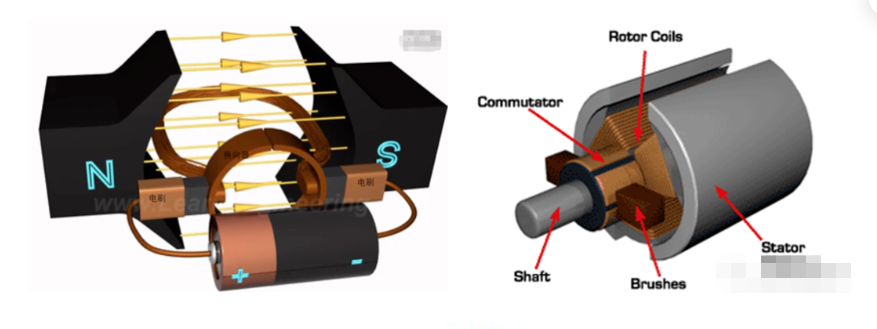
2. Jednosmerný elektromotor - kefový motor
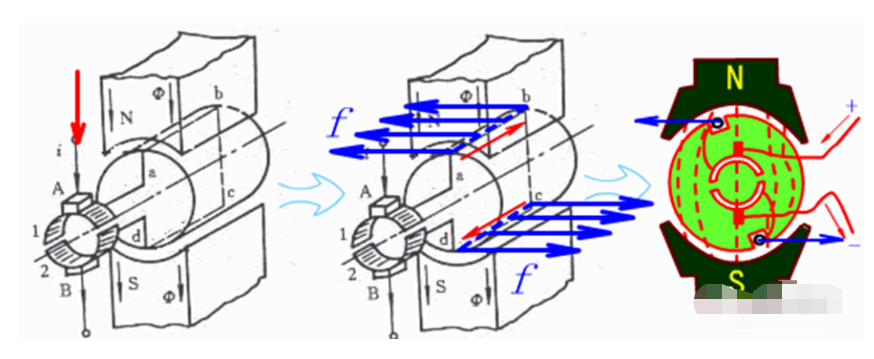
Prečítajte si stredoškolskú fyziku tyranského svinstva, aby sme študovali napájaný vodič v sile magnetického poľa tej veci, vycvičili sme ľavú ruku na zlomenú dlaň, čo je presne princíp jednosmerného indukčného motora.
Všetky elektromotory sa skladajú zo statora a rotora, pri jednosmerných elektromotoroch, aby sa rotor otáčal, musíte neustále meniť smer prúdu, inak sa rotor môže otáčať len o pol otáčky, je to ako pedál na bicykli.
Preto jednosmerné motory potrebujú komutátory.
Všeobecne povedané, kartáčované jednosmerné motory zahŕňajú kartáčované motory a bezkomutátorové motory.
Motor kefy sa tiež nazýva jednosmerný indukčný motor alebo motor s uhlíkovou kefou, často označovaný ako jednosmerný motor s kefou.
It uses mechanical commutation, the external pole does not move the internal coil (armature) moving, commutator and rotor coil rotating together, brushes and magnets are not moving, so the commutator and brush friction friction, complete the current direction switching.
Nevýhody motora kefy.
1, mechanická komutácia iskier generovaných trením komutátora a kefy, elektromagnetické rušenie, vysoký hluk, krátka životnosť.
2, nízka spoľahlivosť, veľa porúch, vyžadujúce častú údržbu.
3, v dôsledku prítomnosti komutátora, ktorý obmedzuje zotrvačnosť rotora, obmedzuje maximálnu rýchlosť, ovplyvňuje dynamický výkon.
Since it has so many shortcomings why it is still commonly used, because it is high torque, simple structure easy maintenance (i.e. change carbon brushes), cheap.
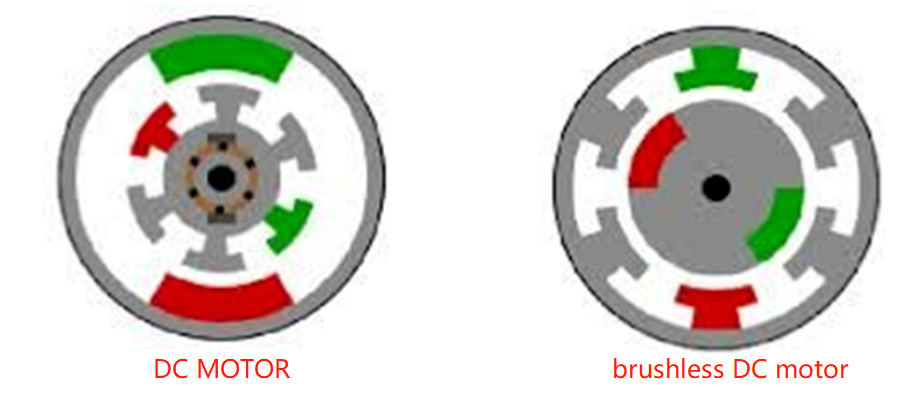
2. Jednosmerné motory - bezkomutátorové motory
Brushless motor is also called DC inverter motor (BLDC) in some fields, it uses electronic commutation (Hall sensor), the coil (armature) does not move the magnetic poles move, then the permanent magnet can be outside the coil or inside the coil, so there is an external rotor brushless motor and internal rotor brushless motor
Brushless motors are constructed in the same way as permanent magnet synchronous motors.
Jediný bezkomutátorový motor však nie je úplným systémom napájania. Brushless musí byť v podstate riadený bezkomutátorovým regulátorom, tiež známym ako ESC, aby sa dosiahla nepretržitá prevádzka.
Je to bezkomutátorový elektronický regulátor (ESC), ktorý skutočne určuje jeho výkon.
Vo všeobecnosti existujú dva typy hnacích prúdov pre bezkomutátorové motory, jeden je štvorcový a druhý je sínusový.
Prvý sa niekedy nazýva jednosmerný bezkomutátorový motor a druhý sa nazýva striedavý servomotor, čo je presne druh striedavého servomotora.
Bezuhlíkové motory fungujú rôznymi spôsobmi a možno ich rozdeliť na bezkomutátorové motory s vnútorným rotorom a bezkomutátorové motory s vonkajším rotorom.
Vnútorný rotor je trojfázový, čo je drahšie.
Vonkajší rotor sa zvyčajne používa jednofázovo, cena ľudí, sériová výroba bola blízko motora s uhlíkovými kefami, takže v posledných rokoch je široko používaný.
Cena vonkajšieho rotora trojfázového sa blíži cene vnútorného rotora.
No, ako tušíte, nevýhodou kefových motorov je pointa bezkomutátorových motorov.
Vyznačuje sa vysokou účinnosťou, nízkou spotrebou energie, nízkou hlučnosťou, dlhou životnosťou, vysokou spoľahlivosťou, servoriadením, plynulou rýchlosťou frekvenčného prevodu (až do veľmi vysokej rýchlosti) a ďalšími výhodami.
Je relatívne menší ako kefový jednosmerný motor, ovládanie ako asynchrónny striedavý motor je jednoduché, rozbehový moment je veľká kapacita preťaženia, čo sa týka nevýhod...... je drahší ako kefa, zlá údržba.
2. Jednosmerný motor - princíp riadenia otáčok
Jednosmerná regulácia otáčok indukčného motora: takzvaná regulácia otáčok, to znamená úpravou otáčok motora na získanie požadovaného krútiaceho momentu.
jednosmerný motor s permanentným magnetom nastavením napätia, sériového odporu, zmenou budenia môže byť rýchlosť, ale skutočné nastavenie napätia je najpohodlnejšie a najčastejšie používané, hlavné použitie regulácie rýchlosti PWM.
PWM je v skutočnosti cez vysokorýchlostný spínač, aby sa dosiahla regulácia jednosmerného napätia, cyklus, otvorený na dlhú dobu, priemerné napätie je vysoké, dlho vypnuté, priemerné napätie je nízke, veľmi pohodlné na nastavenie, pokiaľ je rýchlosť prepínania dostatočne vysoká, pokiaľ je rýchlosť spínania dostatočne rýchla, harmonické zložky siete sú menšie a prúd je súvislejší.
Kefky a komutátor sa však dlho opotrebovávajú a zároveň dochádza k obrovskej zmene prúdu pri komutácii, ktorá veľmi ľahko vytvára iskry.
Komutátor a kefy obmedzujú kapacitu a rýchlosť jednosmerného indukčného motora, čo spôsobuje, že regulácia rýchlosti jednosmerného indukčného motora je prekážkou.
Pri bezkomutátorovom jednosmernom indukčnom motore regulácia otáčok ovláda iba vstupné napätie na povrchu.
Ale samoregulačný systém riadenia frekvencie motora (samotný bezkefkový jednosmerný motor je dodávaný s detektorom polohy rotora a iným zariadením na získavanie signálu polohy rotora, ktoré pomocou signálu polohy rotora tohto zariadenia riadi moment zmeny fázy zariadenia na reguláciu frekvencie napätia) automaticky riadi frekvenciu podľa premenlivého napätia, ktoré je takmer rovnaké ako u jednosmerného (kartáčovaného) motora, čo je veľmi pohodlné. Veľmi pohodlné.
Pretože rotor využíva permanentné magnety, žiadne špeciálne budiace vinutie, v prípade rovnakej kapacity je motor menší, ľahší, efektívnejší, kompaktnejší, spoľahlivejšia prevádzka, lepší dynamický výkon, v pohone elektromobilov a iných aspektov sa hojne využívali.
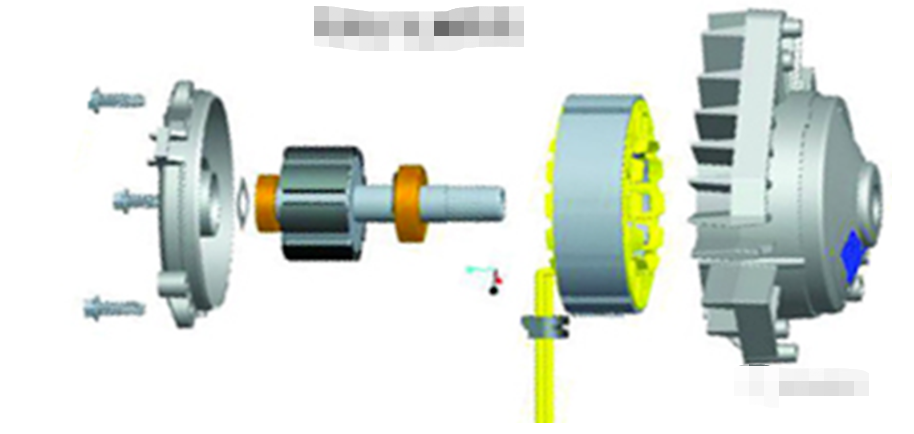
3. Trojfázové motory na striedavý prúd - asynchrónne motory
Striedavé motory sa delia na synchrónne motory a asynchrónne motory, synchrónne motory sa väčšinou používajú v generátoroch a asynchrónne motory sú väčšinou používané v elektromotoroch. Sú to indukčné motory vo veveričke.
Puzdro motora je stator a na statore sú tri symetrické striedavé vinutia.
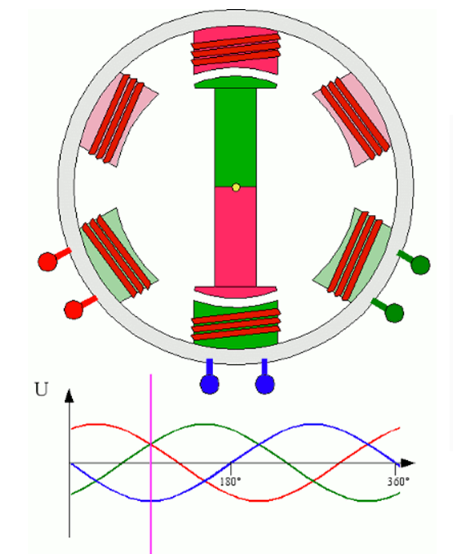
Keď sa sekvencia troch fáz mení, vytvára sa rotačné syntetické magnetické pole a rýchlosť otáčania magnetického poľa je synchrónna rýchlosť.
Synchrónna rýchlosť n=60f/p, f je frekvencia, p je počet pólových párov, napríklad pre 2-pólový motor pripojený do národnej siete 50Hz (t.j. počet pólových párov je 1 pár), potom rýchlosť n=60*50/1=3000r/min.
Podobne synchrónne otáčky 4-pólových, 6-pólových a 8-pólových motorov sú 1500, 1000 a 750.
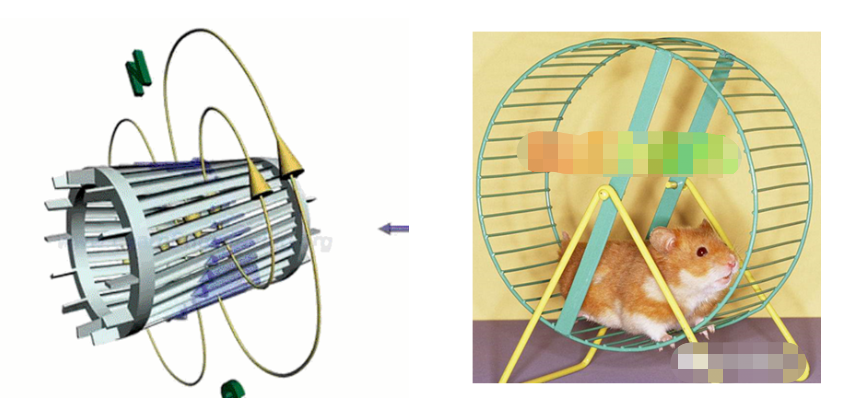
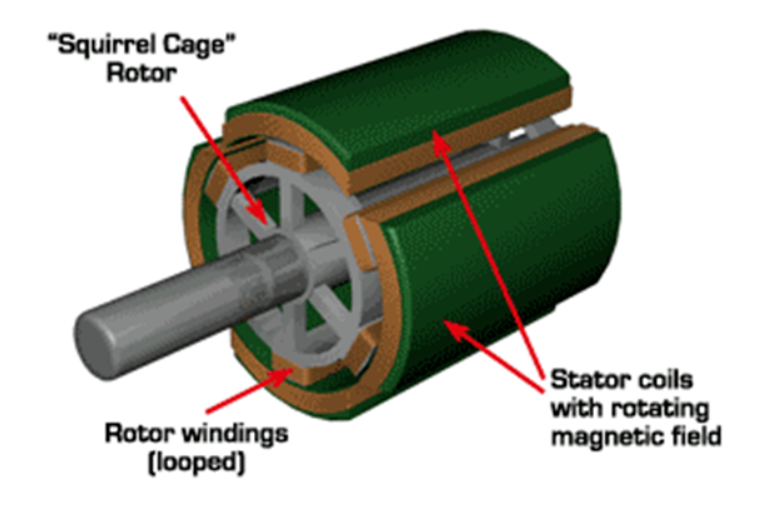
Asynchrónne motory majú jednoduchý mechanizmus s uzavretým rotorom cievky, ako je typ s veveričkovou klietkou.
Cievka rotora preruší rotujúce magnetické pole, aby vytvorila indukovaný elektrický potenciál, ktorý následne generuje indukovaný prúd a nakoniec rotujúce magnetické pole.
Aby sa rotor stal elektromagnetom a sledoval rotáciu magnetického poľa statora, musí byť rýchlosť rotora < rotujúce magnetické pole statora, aby sa prerušili magnetické indukčné čiary.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Teda asynchrónne otáčky rotora <synchrónne otáčky, medzi magnetickým poľom rotora a statora je rozdiel otáčok, preto sa nazýva asynchrónny motor.
Menovité otáčky asynchrónneho motora sa mierne líšia od výrobcu k výrobcovi, asi 2 800 + r/min pre 2-pólový motor, 1 400 +, 950 +, 700 + pre 4-pólový, 6-pólový a 8-pólový asynchrónny motor.
Rýchlosť asynchrónneho motora je vysoká, keď nie je zaťažená, a klesá, keď je zaťaženie.
Asynchrónny motor má jednoduchú konštrukciu, jednoduchú údržbu, spoľahlivú prevádzku a lacnú cenu, takže je široko používaný.
4. Trojfázové motory na striedavý prúd - synchrónne motory
Synchrónny motor.
Ak necháte rýchlosť rotora = rýchlosť otáčania magnetického poľa statora, stáva sa z neho synchrónny motor, v tomto okamihu je potrebné stator premeniť na elektromagnet alebo permanentný magnet, to znamená na napájanie statora, v tomto čase už nie je potrebné rezať magnetickú indukčnú čiaru sa môže otáčať, rýchlosť otáčania a rýchlosť otáčania magnetického poľa je rovnaká, to znamená vytvorenie synchrónneho motora.
Štruktúra rotora synchrónneho motora je zložitejšia ako asynchrónne motory, vysoké ceny, vo výrobnom živote nie je tak široko používaný ako asynchrónne motory, ktoré sa používajú hlavne ako generátory, teraz tepelné elektrárne, vodné elektrárne, parné turbíny, hydraulické turbíny sú v podstate synchrónne motory.
5. Trojfázový striedavý motor - regulácia otáčok asynchrónnych elektromotorov
Regulácia otáčok asynchrónneho motora: teoreticky, asynchrónny motor ovláda striedavú frekvenciu, napätie alebo odpor rotora, môže byť distribúcia pólov motora reguláciou otáčok, ale v praxi je možné dosiahnuť nekonečnú reguláciu otáčok metódou úpravy frekvencie a napätia.
Vzhľadom na to, že rozsah rýchlosti regulácie napätia nie je veľký, vo všeobecnosti sa dá použiť iba pri požiadavkách na riadenie rýchlosti nie sú vysoké príležitosti, aplikácia nie je rozšírená.
Variabilná frekvenčná regulácia rýchlosti: Keď už hovoríme o frekvencii, možno sme o nej už počuli.
Úplný názov frekvenčnej konverzie je Variable Voltage Variable Frequency (VVVF), čo znamená, že pri zmene frekvencie dochádza k zmene napätia, takže rozsah otáčok asynchrónneho motora je dostatočne veľký.
Frekvenčné meniče možno rozdeliť do dvoch širokých kategórií: frekvenčné meniče AC-AC a frekvenčné meniče AC-DC.
AC-DC invertor: striedavý prúd je priamo transformovaný na striedavý prúd inej frekvencie pomocou výkonovej elektroniky.
Maximálna výstupná frekvencia nemôže prekročiť polovicu vstupnej frekvencie, takže sa vo všeobecnosti používa iba v nízkorýchlostných, vysokokapacitných systémoch a môže eliminovať potrebu veľkého reduktora.
AC-DC invertor najprv napraví striedavý prúd na jednosmerný a potom ho zmení na striedavý s regulovateľnou frekvenciou a napätím prostredníctvom meniča, s technológiou PWM, tento druh meniča dokáže realizovať široký rozsah premenlivého napätia a frekvencie.
Pri elektrických vozidlách je asynchrónny motor odolný, má vysokú kapacitu preťaženia a riadiaci algoritmus je natoľko vyspelý, že sa dá úplne použiť.
6. Trojfázový striedavý motor - regulácia otáčok synchrónneho motora
Synchrónna regulácia otáčok motora:
Synchrónne stroje nemajú rýchlosť znižovania a riadiace napätie nemôže meniť rýchlosť, keď je určená štruktúra, takže pred objavením sa frekvenčných meničov boli synchrónne motory úplne neregulované.
Vzhľad frekvenčného meniča spôsobuje, že striedavý synchrónny motor má tiež obrovský rozsah regulácie otáčok, pretože jeho rotor má aj nezávislé budenie (permanentný magnet alebo elektrické budenie), jeho rozsah regulácie otáčok je širší ako u asynchrónneho motora a synchrónny motor dostal nový život.
Synchrónny systém riadenia s premenlivou frekvenciou motora s premenlivým napätím možno rozdeliť na iné riadené riadenie s premenlivou rýchlosťou a samoregulované riadenie s premenlivou rýchlosťou.
Pre inak riadenú reguláciu otáčok s premenlivou frekvenciou je podobná regulácii s premenlivou frekvenciou asynchrónneho motora, ktorú je možné ovládať pomocou SVPWM a iných metód riadenia podľa svojho matematického modelu a jej výkon je lepší ako u bežného asynchrónneho motora na striedavý prúd.
Samoriadený invertorový synchrónny motor mal v procese vývoja rôzne názvy, ako napríklad bezkomutátorový motor; pri použití permanentných magnetov a zadávaní trojfázovej sínusovej vlny sa môže nazývať sínusový synchrónny motor s permanentným magnetom; a ak zadáte štvorcovú vlnu, potom sa to dá nazvať synchrónny motor s permanentným magnetom s lichobežníkovou vlnou, áno, je podobný predtým uvedenému bezkomutátorovému jednosmernému stroju (BLDM), nemáme pocit, že by sa veľký kruh rapu otočil Vráťte sa späť, ale teraz musíte hlbšie porozumieť premenlivej rýchlosti, takže bezkomutátorový jednosmerný motor pri použití jednosmerného vstupu, ale použitie technológie frekvenčnej konverzie synchrónneho motora (rovnaká štruktúra ako pri bezsynchrónnom motore používa permanentný motor s permanentným motorom).
7. Jednofázový striedavý asynchrónny motor - jednofázový striedavý sériovo budený motor (kefa)
Jednofázový striedavý sériovo budený motor, bežne známy ako sériovo budený motor alebo univerzálny motor (zahraničný názov UniversalMotor, pomenovaný kvôli AC a DC univerzálne), vinutie kotvy a budiace vinutie sú zapojené do série, aby spolupracovali.
Jednofázový sériovo budený motor sa tiež nazýva AC-DC sériovo budený motor s dvojitým použitím, ktorý môže pracovať buď so striedavým alebo jednosmerným prúdom.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Výhody jednofázového sériovo budeného motora spočívajú v tom, že má vysokú rýchlosť, vysoký rozbehový krútiaci moment, malú veľkosť, nízku hmotnosť, nie je ľahké zablokovať rotáciu, široký rozsah použiteľného napätia a rýchlosť je možné regulovať metódou regulácie napätia, ktorá je jednoduchá a ľahko realizovateľná.
Preto je široko používaný v elektrickom náradí, ako je uhlová brúska, ručná vŕtačka atď.
Štruktúra jednofázového sériovo budeného motora je veľmi podobná štruktúre jednosmerného sériovo budeného motora, hlavný rozdiel je v tom, že jadro statora jednofázového sériovo budeného motora musí byť vyrobené z laminovanej kremíkovej ocele, zatiaľ čo magnetické póly jednosmerného prúdu môžu byť vyrobené z laminovanej aj integrálnej konštrukcie.
Jednofázová sériovo budená regulácia otáčok motora, väčšina metód používaných na nastavenie napätia, spočíva v zmene elektrického potenciálu.
Metóda regulácie napätia jednofázového sériovo budeného motora využíva riadenú reguláciu napätia s fázovým posunom, ktorá využíva spúšťacie napätie SCR na oneskorenie za vstupným napätím, aby sa dosiahlo spustenie fázového posunu vstupného napätia.
Pri implementácii sú hardvérové a softvérové metódy.
Metóda regulovaného napätia využívajúca technológiu riadenia rýchlosti riadenou kremíkom má jednoduchú líniu, malú veľkosť komponentov a ďalšie charakteristiky jednoduchej a efektívnej metódy riadenej kremíkom.
a) krivka zmeny striedavého prúdu;
(b) Smer otáčania rotora, keď je prúd kladnej polvlny
(c) Smer otáčania rotora, keď je prúd zápornej polvlny

8. Jednofázový striedavý asynchrónny motor - jednofázový striedavý motor s kotvou nakrátko (bezkefový)
Jednofázový prúd cez vinutie kotvy vytvára skôr pulzujúce magnetické pole než rotujúce magnetické pole, takže jednofázové asynchrónne motory nie je možné spustiť samostatne.
Aby sa vyriešil problém so štartovaním, jednofázové asynchrónne motory napájané striedavým prúdom sa často vyrábajú ako dvojfázové.
Hlavné vinutie je napájané priamo z jednofázového napájacieho zdroja; sekundárne vinutie je priestorovo odlišné od hlavného vinutia o 90° (elektrický uhol, rovný mechanickému uhlu vydelenému počtom pólových párov motora).
Sekundárne vinutie sa po sériovom zapojení kondenzátora alebo rezistora pripája na jednofázové striedavé napájanie tak, že ním prechádzajúci prúd a prúd v hlavnom vinutí majú určitý fázový rozdiel.
To robí zo syntetického magnetického poľa eliptické rotačné pole alebo možno dokonca blízke kruhovému rotačnému poľu.
Motor tak získa rozbehový moment.
Motor využívajúci odporovú metódu separácie fáz je lacný, napríklad sekundárne vinutie môže byť navinuté tenším drôtom, ale efekt separácie fáz je slabý a energia sa spotrebúva v odpore.
Po naštartovaní motora a dosiahnutí určitej rýchlosti sa sekundárne vinutie zvyčajne automaticky odstráni pomocou odstredivého spínača namontovaného na hriadeli motora, aby sa znížili odporové straty a zlepšila sa prevádzková účinnosť.
Vo všeobecnosti sa používa pri príležitosti, kedy nie je požiadavka na rozbehový krútiaci moment príliš vysoká, ako napríklad malý sústruh, malá chladnička atď. Nevýhodou je, že rýchlosť nemožno nastaviť.
Je možné vytvoriť syntetické magnetické pole motora v blízkosti kruhového rotujúceho magnetického poľa v určitom pracovnom bode motora, aby sa získali lepšie pracovné charakteristiky.
Aby asynchrónny motor s delenou fázou získal lepší štartovací výkon alebo lepšie prevádzkové charakteristiky alebo oboje, požadovaná kapacita (množstvo hodnoty) je odlišná a možno ju rozdeliť do troch druhov
9. krokové motory - krokové motory s otvorenou slučkou
Krokové motory (s otvorenou slučkou) sú motory s otvorenou slučkou, ktoré premieňajú signály elektrických impulzov na uhlové posuny a sú mimoriadne široko používané.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Počet impulzov môže byť riadený na riadenie veľkosti uhlového posunu, aby sa dosiahol účel presného polohovania; súčasne je možné ovládať frekvenciu impulzov na riadenie rýchlosti a zrýchlenia otáčania motora, aby sa dosiahol účel regulácie rýchlosti.
Krokový motor je druh indukčného motora, ktorý funguje pomocou elektronického obvodu, t.j. ovládača, na premenu jednosmerného prúdu na viacfázový riadiaci prúd časovania napájaný zdieľaním času.
Aj keď sú krokové motory poháňané jednosmerným prúdom, nemožno ich chápať ako jednosmerné motory, čo sú výkonové motory, ktoré premieňajú jednosmernú elektrickú energiu na mechanickú energiu, zatiaľ čo krokové motory sú riadiace motory s otvorenou slučkou, ktoré premieňajú signály elektrických impulzov na uhlové posunutie.
10. Krokový motor - krokové servo porovnanie
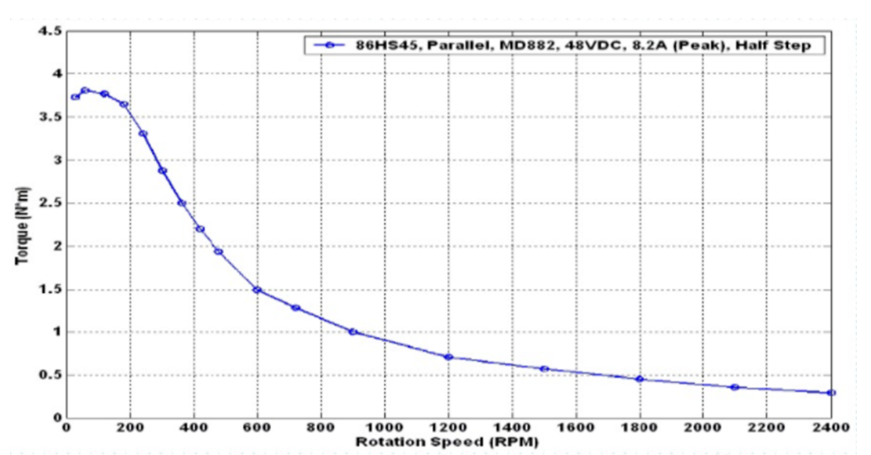
Všimnite si, že krokové motory sa používajú v nízkorýchlostných aplikáciách - nie viac ako 1000 ot./min. za minútu, najlepší pracovný rozsah je 150~500 ot./min. (krokovanie v uzavretej slučke až do 1500).
2-fázový krokový motor pri 60 ~ 70 ot./min. je náchylný na nízkorýchlostný rezonančný jav, vytvára vibrácie a hluk, ktorým je potrebné sa vyhnúť zmenou redukčného pomeru, zvýšením jemnej frakcie, pridaním magnetických tlmičov atď.
Opatrenia týkajúce sa presnosti rozdelenia, keď je úroveň rozdelenia väčšia ako 4, nemožno zaručiť presnosť uhla kroku, vysoké požiadavky na presnosť, najlepšie je prepnúť na viac fáz (t. j. menší uhol kroku) krokového motora alebo krokového motora s uzavretou slučkou, servomotora.
Krokový motor (otvorená slučka) a servomotor 7 rôznych.
Presnosť riadenia - presnosť riadenia servomotora sa dá nastaviť podľa enkodéra, vyššia presnosť.
B nízkofrekvenčné charakteristiky - krokové motory sú náchylné na vibrácie pri nízkych frekvenciách, servomotory nie.
C momentovo-frekvenčná charakteristika - krútiaci moment krokového motora sa zmenšuje so zvyšujúcou sa rýchlosťou, takže jeho maximálna prevádzková rýchlosť je vo všeobecnosti v <1000 ot./min., servomotor pri menovitých otáčkach (všeobecne 3000 ot./min.) môže vydávať menovitý krútiaci moment, pri menovitých otáčkach nad konštantný výkon, maximálne otáčky až 5000 ot./min.;.
D preťažiteľnosť - krokový motor nemožno preťažiť, maximálny krútiaci moment servomotora je možné preťažiť 3x.
E prevádzkový výkon - krokový motor pre riadenie s otvorenou slučkou, servomotor pri riadení v uzavretej slučke.
Rýchlostná odozva F - čas spustenia krokového motora 0,15 ~ 0,5 s, servomotor 0,05 ~ 0,1, najrýchlejší 0,01 s na dosiahnutie menovitých 3000 ot./min.
Ukazovatele účinnosti G - účinnosť krokového motora asi 60%, servomotor asi 80%.
Pri skutočnom použití nájdete: servomotor drahý, z mnohých drahý, preto sú synchrónne motory viac používané, najmä v požiadavkách na presnosť polohovania nie sú príliš vysoké synchrónny remeňový pohon, plochý pásový dopravník a pri iných príležitostiach často používajú krokový motor.
11. Krokové motory - krokové motory s uzavretou slučkou
Krokové motory s uzavretou slučkou: Okrem krokových motorov s otvorenou slučkou existujú krokové motory, ktoré majú na konci motora pridaný kódovač, ktorý umožňuje ovládanie v uzavretej slučke.
Riadenie krokových motorov v uzavretej slučke využíva spätnú väzbu polohy a/alebo spätnú väzbu rýchlosti na určenie fázových prechodov vhodných pre polohu rotora, čo môže výrazne zlepšiť výkon krokových motorov.
Servosystémy bez skokových javov.
Výhody krokových motorov s uzavretou slučkou.
1. Vysoká rýchlosť odozvy. V porovnaní so štandardnými motormi má krokový chod s uzavretou slučkou veľmi silné sledovanie polohovacích príkazov, takže čas polohovania je veľmi krátky. Pri použití častého štartovania/zastavovania je možné výrazne skrátiť čas polohovania.
2. Generujte väčší krútiaci moment ako bežné servo. Vyrovnajte nedostatok krokov a vibrácií pri nízkej rýchlosti bežného krokového systému.
3. Vysoký krútiaci moment môže byť generovaný aj pri 100% zaťažení, bez straty chodu, bez uvažovania straty krútiaceho momentu a iných problémov, ako sú bežné krokové systémy.
4. Použitím pohonu s uzavretou slučkou sa účinnosť môže zvýšiť na 7,8-krát, výstupný výkon sa môže zvýšiť na 3,3-krát a rýchlosť sa môže zvýšiť na 3,6-krát.
Môže dosiahnuť vyššiu rýchlosť chodu, stabilnejšiu a plynulejšiu rýchlosť ako ovládanie s otvorenou slučkou.
5. Krokový motor bude úplne stáť, keď sa zastaví, bez mikrovibračného javu bežného serva.
Môže nahradiť aplikáciu univerzálneho servosystému, keď sa vyžaduje nízka cena a vysoká presnosť polohovania.
12. krokový motor - porovnanie krokového serva
Krokové motory s uzavretou slučkou automaticky upravujú veľkosť prúdu vinutia podľa veľkosti záťaže, teplo a vibrácie sú menšie ako krokové motory s otvorenou slučkou, existuje spätná väzba kódovača, takže presnosť je vyššia ako bežné krokové motory, odozva motora ako krokové motory s otvorenou slučkou je pomalšia ako servomotory rýchlejšie, počas prevádzky sa vyskytne chyba polohy, chyba sa bude postupne znižovať v milisekundách po zastavení príkazu.
Vysokorýchlostný krútiaci moment ako stepper s otvorenou slučkou, bežné aplikácie pri príležitosti 0-1500 ot./min.
In summary: closed-loop stepper motor with low cost, high efficiency, no jitter, no stop micro-vibration, high rigidity, no rectification, high speed, high dynamic response, etc., is the replacement of high-cost servo systems, low-end open-loop stepper systems and other cost-effective solutions
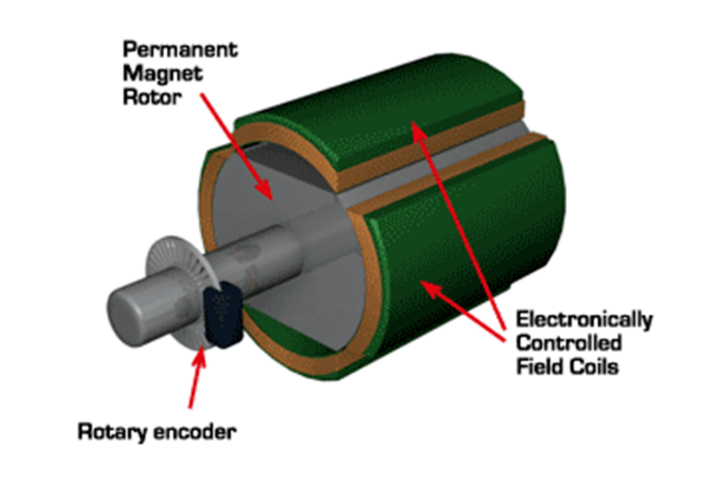
13. Servomotor - Všeobecný servomotor
Servo motor (servo motor), also called actuator motor, can make the control speed, position accuracy very accurate, can convert the voltage signal into torque and speed to drive the control object.
Unlike the principle structure of stepper motor, servo motor is a standard DC motor or AC induction motor because the control circuit is put outside the motor, and the motor part inside.
The servo motor relies on pulses for positioning. When the servo motor receives 1 pulse, it rotates by an angle corresponding to 1 pulse.
Every time the motor rotates an angle, the encoder will send out the corresponding number of feedback pulses. The feedback pulses and the pulses received by the servo driver form a closed-loop control, so that the servo driver can control the rotation of the motor very precisely to achieve precise positioning.
Servo motor control: Generally, servo motors for industrial use are controlled by three loops, namely current loop, speed loop and position loop, which can feedback the angular acceleration, angular speed and rotational position of the motor operation respectively.
The chip controls the drive current of each phase of the motor through the feedback of the three, so that the speed and position of the motor can run accurately as scheduled.
AC servo has the feature of constant torque under rated speed, common 200W,400W low and medium inertia AC servo rated speed is 3000rpm, the highest speed is 5000rpm, high speed.
The torque is proportional to the current, so it can work in the torque mode, such as locking screws, pressing terminals and other occasions that need constant torque.
AC servo work noise and vibration is very small, low heat generation.
The same volume of motor inertia rotor inertia is small, 400W servo inertia is only equivalent to the rotor inertia of 57 base 2NM stepper motor.
Servo has a short time overload capacity, the selection needs to consider the motor overload multiplier when acceleration and deceleration.
The servo uses closed-loop control and has the same position tracking error as a closed-loop stepper.
Servo requires commissioning before use.
The original torque of the stepper and servo motor is not enough, often need to work with the reducer, you can use the reduction gear set or planetary reducer.
6. Servo motor - servo
Servo is a class of DC servo motor, first used for small airplane models and now used for small robot joints.
From the structural analysis, a servo consists of a small DC motor, plus sensors, control chips, and reduction gear sets, which are mounted into an integrated housing.
It is able to control the rotation angle through an input signal (usually a PWM signal, but also a digital signal).
Since it is a simplified version, the original three-loop control of the servo motor is simplified to one loop, i.e., only the position loop is detected.
A cheap solution is a potentiometer, which is detected by a resistor, while an advanced solution will use a Hall sensor, or an encoder.
General servos are inexpensive and compact, but have very low accuracy and poor position calming capability, and can meet many low-end needs.
With the boom of consumer-grade small robots in the last two years, small and lightweight servos have instantly become the most suitable joint components.
However, robot joints require much higher performance than aerial servos, and as a commercial product also require much higher quality servos than DIY players.
Vitajte, aby ste sa s nami podelili o ďalšie informácie o elektromotoroch v oblasti komentárov!
V prípade akýchkoľvek otázok týkajúcich sa elektromotora sa obráťte na profesionálny elektromotor výrobcu v Čína takto:
Motor Dongchun má širokú škálu elektrických motorov, ktoré sa používajú v rôznych odvetviach, ako je doprava, infraštruktúra a stavebníctvo.
Získajte rýchlu odpoveď.






