Nearly half of the world's power consumption is consumed by electric motors, so the high efficiency of electric motors is said to be the most effective measure in solving the world's energy problems.
In general, it refers to the transformation of the force generated by the flow of current in a magnetic field into a rotary action, and in a broad range, it also includes linear action.
Depending on the type of power supply used to drive the motor, there are DC motors andAC electric motors.
Și conform principiului de rotație a motorului, acesta poate fi împărțit aproximativ în următoarele categorii. (Cu excepția motoarelor speciale)
Motor electric de curent continuu /motoare de curent continuu (cu curent continuu).
Motoare cu perii
Motoarele cu perii utilizate pe scară largă sunt denumite în general motoare electrice cu curent continuu.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Motor DC fără perii
Motoarele de curent continuu fără perii nu folosesc perii sau comutatoare, ci folosesc o funcție de comutare, cum ar fi un tranzistor, pentru a comuta curentul și a efectua acțiune de rotație.
Motor pas cu pas.
Acest motor funcționează sincron cu puterea impulsului și, prin urmare, este numit și motor cu inducție a impulsurilor.
Se caracterizează prin capacitatea de a realiza cu ușurință o operație de poziționare precisă.
motoare de curent alternativ
Motor asincron
Puterea de curent alternativ generează un câmp magnetic rotativ în stator, care, la rândul său, generează un curent indus în rotor, în a cărui interacțiune are loc rotația pentru motorul de inducție cu curent alternativ.
Motor sincron
Puterea de curent alternativ creează un câmp magnetic rotativ, iar rotorul cu poli magnetici se rotește din cauza atracției.
-Viteza de rotație este din fericire sincronizată cu frecvența sursei de alimentare.
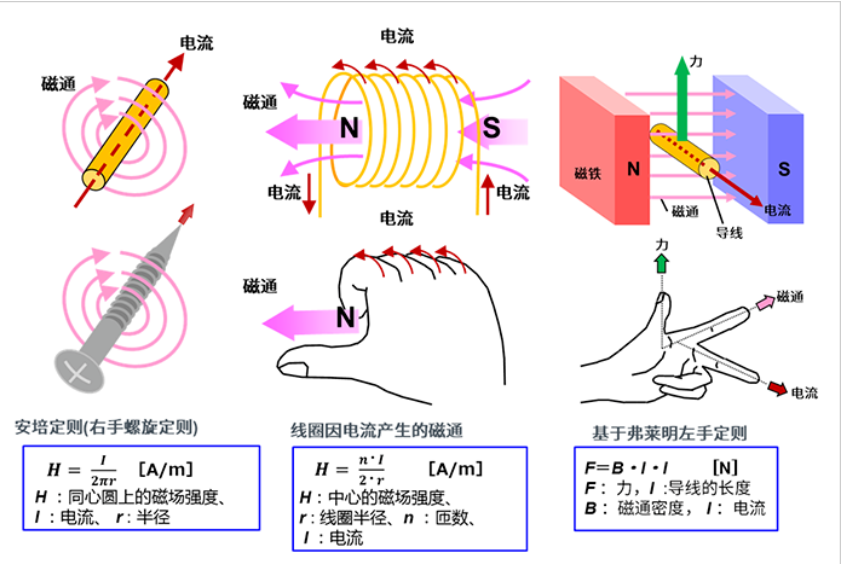
About currents, magnetic fields and forces
În primul rând, de dragul explicațiilor ulterioare ale principiului motorului, să trecem în revistă legile/legile de bază referitoare la curent, câmp magnetic și forță.
Deși există un sentiment de nostalgie, este ușor să uiți aceste cunoștințe dacă nu folosești de obicei componente magnetice
Combinăm imagini și formule pentru a ilustra.
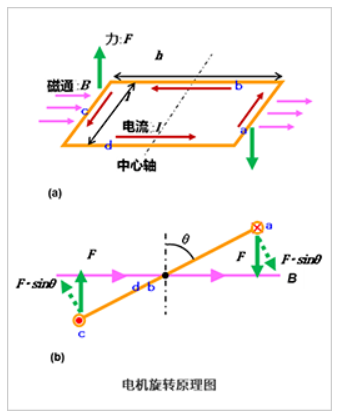
Când cadrul de sârmă este dreptunghiular, se ia în considerare forța care acționează asupra curentului.
Forța F care acționează asupra părților laturilor a și c este
Cuplul este generat cu axa centrală ca axa centrală.
De exemplu, când se consideră o stare în care unghiul de rotație este doar θ, forța care acționează în unghi drept față de b și d este sinθ, deci cuplul Ta al piesei a este dat de:
Considerând partea c în același mod, cuplul este dublat și generează cuplul calculat prin următoarea ecuație
Deoarece aria dreptunghiului este S = h・l, înlocuirea acestuia în ecuația de mai sus dă următorul rezultat.
The formula applies not only to rectangles, but also to other common shapes such as circles. The motor makes use of this principle.
How does a electric motor rotate?
1) The induction motors rotate with the help of magnets and magnetic force
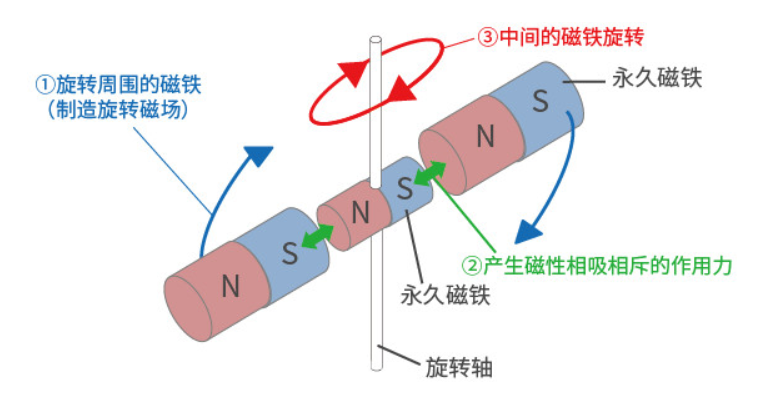
Around a permanent magnet with a rotating shaft,
① the magnet is rotated (so that a rotating magnetic field is generated),
② then according to the principle that N and S poles attract each other at different poles and repel each other at the same level,
③ the magnet with a rotating shaft will rotate.
This is the basic principle of ac motors rotation.
The current flowing in the conductor causes a rotating magnetic field (magnetic force) around it and thus the magnet rotates, which is practically the same state of action as this.
În plus, atunci când firul este înfășurat sub formă de bobină, forța magnetică este sintetizată, creând un flux mare de câmp magnetic (flux) care produce poli N și S.
În plus, prin introducerea unui miez de fier în firul asemănător bobinei, liniile magnetice de forță devin ușor de trecut și poate fi generată o forță magnetică mai puternică.
2) Motor efectiv rotativ
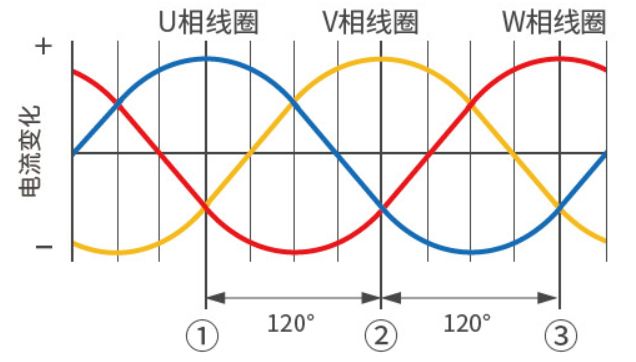
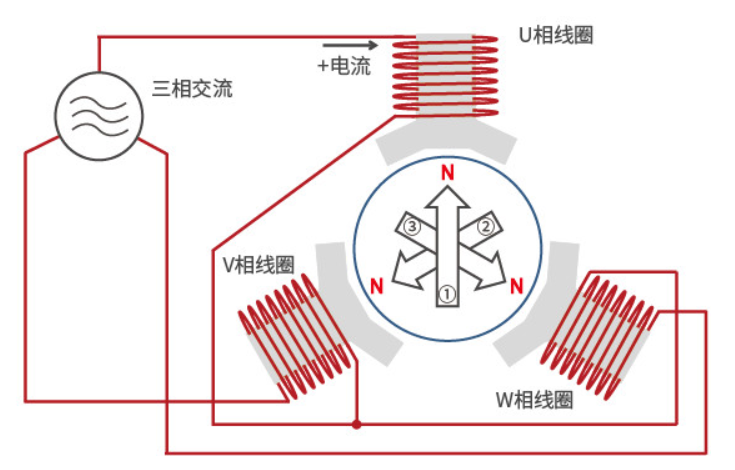
Aici, ca metodă practică de rotație a motorului, introducem metoda de creare a unui câmp magnetic rotativ folosind motor trifazat de curent alternativ și bobine.
(Motoarele industriale trifazate de curent alternativ sunt un semnal de curent alternativ distanțat la 120° în fază)
Câmpul magnetic sintetic în starea ① de mai sus corespunde figurii ① de mai jos.
Câmpul magnetic sintetic în starea ② de mai sus corespunde figurii ② de mai jos.
Câmpul magnetic sintetic în starea ③ de mai sus corespunde figurii ③ de mai jos.
După cum sa menționat mai sus, bobinele miezului bobinat sunt împărțite în trei faze, cu o configurație de interval de 120° de bobine de fază U, bobine de fază V și bobine de fază W, cu bobina cu tensiune înaltă producând N-pol și bobina cu joasă tensiune producând S-pol.
Fiecare fază se modifică în funcție de undă sinusoidală, astfel încât polaritatea (polul N, polul S) și câmpul magnetic al acesteia (forța magnetică) generate de fiecare bobină se vor modifica.
At this time, the coil that produces N pole alone changes in sequence according to the U-phase coil → V-phase coil → W-phase coil → U-phase coil, and thus rotation occurs.
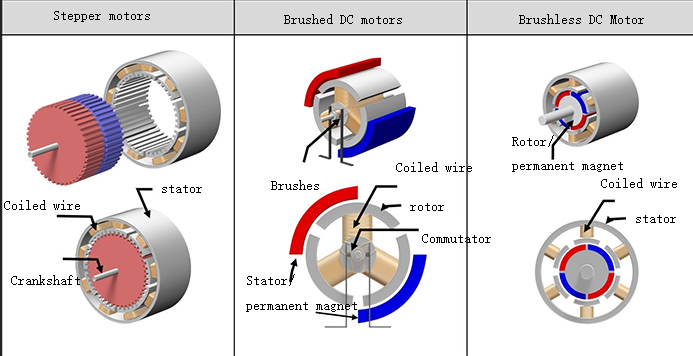
Structure of a small motor
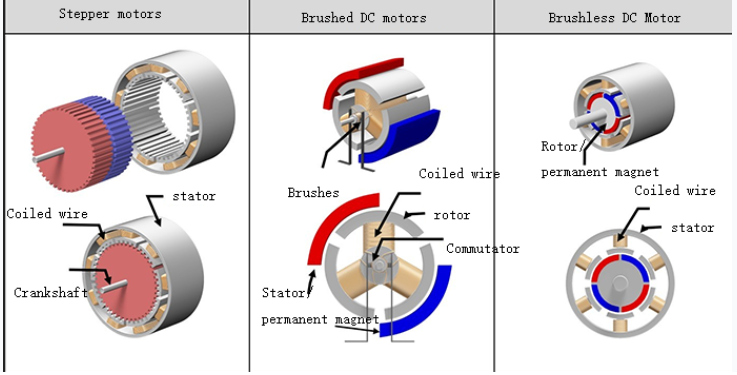
The following figure gives the approximate structure and comparison of three types of industrial motors: stepper motors, brushed DC (DC) motors, and brushless DC (DC) motors.
The basic components of these motors are mainly coils, magnets and rotors, and there are also coil-fixed and magnet-fixed types depending on the type.
The following is a description of the structure associated with the example diagram. Since there may be other structures if divided more carefully, please understand that the structure presented in this paper is under a large frame.
Bobina motorului pas cu pas aici este fixată pe partea exterioară, iar magnetul este rotit pe partea interioară.
Aici magnetul motorului DC periat este fixat pe partea exterioară, iar bobina se rotește pe partea interioară. T
Periile și comutatorul sunt responsabile pentru alimentarea cu energie a bobinei și schimbarea direcției curentului.
În cazul unui motor fără perii, bobina este fixată la exterior, iar magnetul se rotește pe interior.
Structura unui motor fără perii este diferită chiar dacă componentele de bază sunt aceleași din cauza diferitelor tipuri de motoare. Detaliile vor fi explicate în fiecare secțiune.
Brush motor
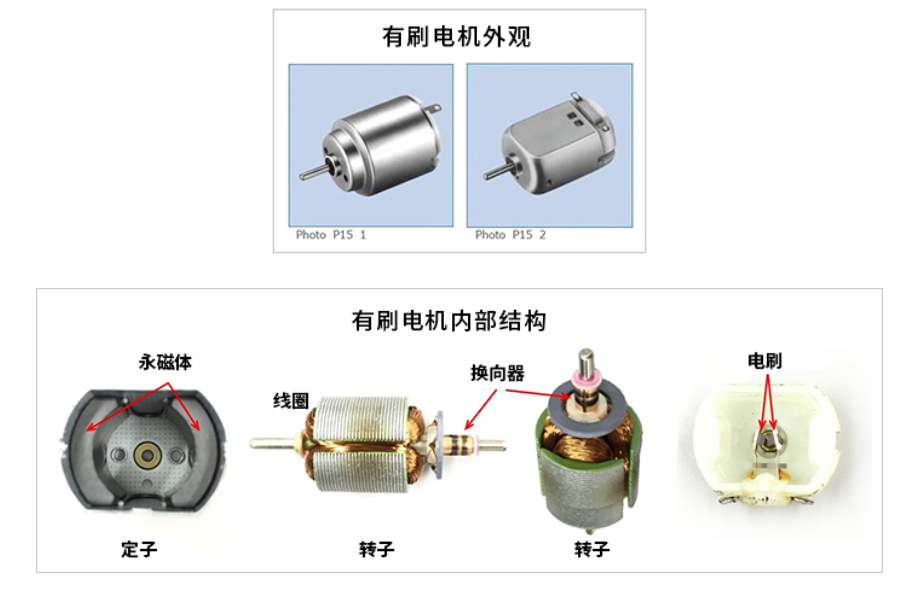
Structura motoarelor DC cu perii
Mai jos este aspectul unui motor DC cu perie folosit adesea în modele și o diagramă schematică a defecțiunii unui motor normal cu doi poli (2 magneți) cu trei sloturi (3 bobine). Poate că mulți dintre voi aveți experiență în dezasamblarea motorului electric de curent continuu și în scoaterea magneților.
Puteți vedea că magneții permanenți ai unui motor de curent continuu periat sunt fixați, iar bobinele unui motor de curent continuu periat se pot roti în jurul centrului intern.
The fixed side is called the "stator" and the rotating side is called the "rotor".
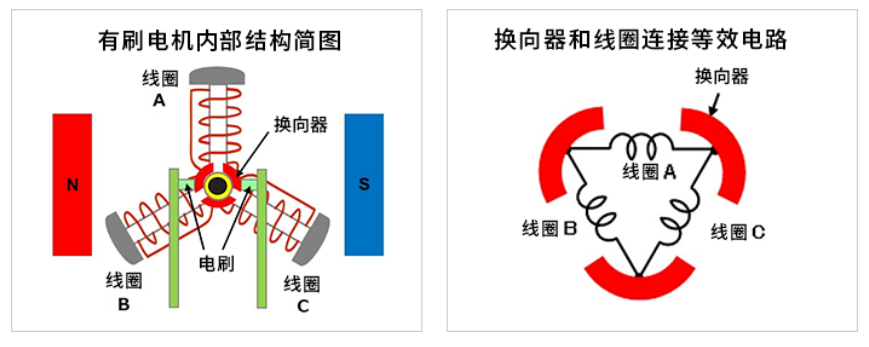
Următoarea este o schiță structurală care reprezintă conceptul de structură.
Periferia axei centrale rotative are trei comutatoare (foi metalice îndoite pentru comutarea curentului).
Pentru a evita contactul unul cu altul, comutatoarele sunt configurate la 120° una de alta (360° ÷ 3 piese). Comutatoarele se rotesc cu rotația arborelui.
Un comutator este conectat la un capăt al bobinei și la celălalt capăt al bobinei, iar cele trei comutatoare și cele trei bobine formează un întreg (inel) ca o rețea de circuite.
Două perii sunt fixate la 0° și 180° pentru a intra în contact cu comutatorul.
La perii este conectată o sursă de alimentare DC externă, iar curentul circulă în perie → comutator → bobină → perie.
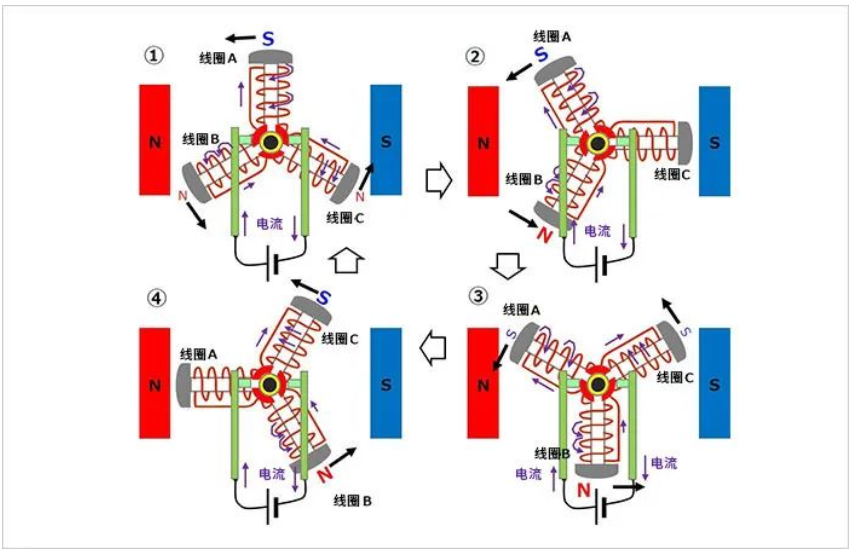
Principiul de rotație al motorului de curent continuu cu perie
① Rotiți în sens invers acelor de ceasornic din starea inițială
Bobina A se află în partea superioară și conectează sursa sculelor electrice la perii, setați partea stângă ca (+) și partea dreaptă ca (-).
Un curent mare curge de la peria din stânga prin comutator către bobina A.
Aceasta este structura în care partea superioară (exterior) a bobinei A devine polul S.
Și deoarece 1/2 din curentul din bobina A curge din peria din stânga către bobinele B și C în direcția opusă bobinei A, părțile exterioare ale bobinelor B și C devin poli N slabi (indicate prin litere puțin mai mici în figură).
Câmpurile magnetice generate în aceste bobine și efectele respingătoare și atractive ale magneților fac ca bobinele să fie supuse unei forțe de rotație în sens invers acelor de ceasornic.
② Rotire suplimentară în sens invers acelor de ceasornic
Next, assume that the right brush is in contact with both commutators in a state where coil A is rotated 30° counterclockwise.
The current of coil A flows continuously from the left brush through the right brush and the outer side of the coil remains S-pole.
The same current as coil A flows through coil B, and the outer side of coil B becomes stronger N-pole.
Since the ends of coil C are shorted by the brushes, no current flows and no magnetic field is generated.
Even in this case, there is a counterclockwise rotating force.
Bobina de pe partea superioară de la ③ la ④ este supusă continuu unei forțe care se deplasează spre stânga, iar bobina inferioară este supusă continuu unei forțe care se deplasează spre dreapta și continuă să se rotească în sens invers acelor de ceasornic
Când bobina se rotește la fiecare 30° la ③ și ④, partea exterioară a bobinei devine polul S atunci când bobina este deasupra axei orizontale centrale; când bobina este mai jos, devine polul N, iar mișcarea se repetă.
Cu alte cuvinte, bobina superioară este supusă în mod repetat unei forțe care se deplasează spre stânga, iar bobina inferioară este supusă în mod repetat unei forțe care se deplasează spre dreapta (ambele în sens invers acelor de ceasornic). Acest lucru face ca rotorul să se rotească tot timpul în sens invers acelor de ceasornic.
Dacă puterea este conectată la peria stângă (-) și peria dreaptă (+) opusă, se generează un câmp magnetic în înfășurările statorului bobinelor în sens opus, astfel încât forța aplicată bobinelor se mișcă în sens opus și devine rotație în sensul acelor de ceasornic.
În plus, atunci când alimentarea este deconectată, rotorul motorului periat nu se mai rotește deoarece este lipsit de câmpul magnetic care îl menține în rotație.
Three-phase full-wave brushless motor
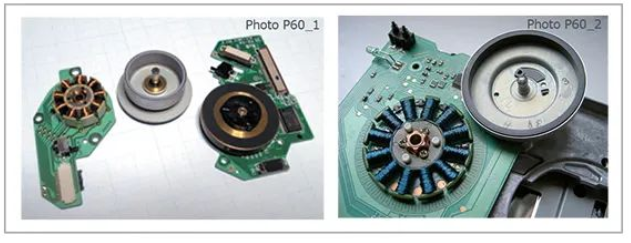
Aspectul și structura unui motor trifazat fără perii cu undă completă
Următoarea figură prezintă un exemplu de aspect și structura unui motor fără perii.
În stânga este un exemplu de motor cu ax utilizat pentru a roti un disc într-un dispozitiv de redare a discurilor. Există 9 bobine de trei faze x 3. În dreapta este un exemplu de motor cu ax pentru un dispozitiv FDD cu 12 bobine (trifazate x 4). Bobinele sunt fixate pe placă și înfășurate pe miez.
Partea în formă de disc din partea dreaptă a bobinelor este rotorul cu magnet permanent. Arborele rotorului este introdus în centrul bobinei și acoperă partea bobinei, iar magneții permanenți înconjoară periferia bobinei.
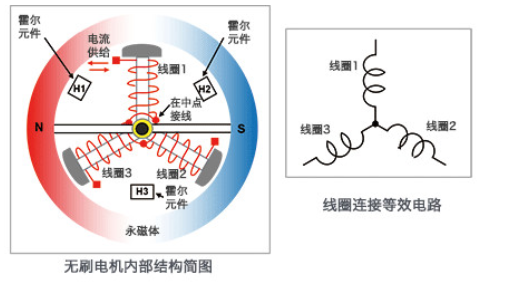
Structura internă a motorului trifazat fără perii și circuitul echivalent al conexiunii bobinei
Urmează o schiță a structurii interne și a circuitului echivalent al conexiunii bobinei.
Această schiță a structurii interne este un exemplu de motor cu 2 poli (2 magneți) cu 3 fante (3 bobine) cu o structură foarte simplă. Este similar cu structura unui motor periat cu același număr de poli și fante, dar partea bobină este fixă și magneții pot fi rotiti. Desigur, nu există perii.
În acest caz, bobinele sunt conectate într-o formă de Y și un element semiconductor este utilizat pentru a furniza curent bobinelor, controlând fluxul și ieșirea curentului în funcție de poziția magneților rotativi.
În acest exemplu, un element Hall este utilizat pentru a detecta poziția magnetului. Elementul Hall este configurat între bobină și bobină pentru a detecta tensiunea generată și utilizată ca informații de poziție pe baza intensității câmpului magnetic. În imaginea motorului arborelui FDD prezentată mai devreme, puteți vedea și elementul Hall utilizat pentru a detecta poziția dintre bobină și bobină (deasupra bobinei).
Elementele Hall sunt bine cunoscute ca senzori magnetici.
Poate converti magnitudinea câmpului magnetic în mărimea tensiunii și poate indica direcția câmpului magnetic în termeni pozitivi sau negativi.
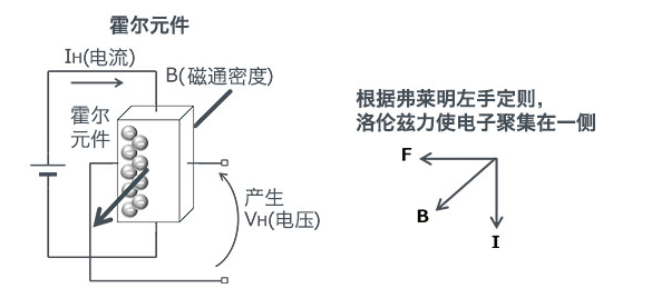
Mai jos este o diagramă care arată efectul Hall.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
Tensiunea rezultată VH este exprimată prin următoarea ecuație.
VH = (KH / d)・IH・B ※KH: coeficient Hall, d: grosimea suprafeței de penetrare a fluxului
După cum arată formula, cu cât este mai mare curentul, cu atât este mai mare tensiunea. Această proprietate este adesea folosită pentru a detecta poziția rotorului (magnetului).
Principiul de rotație al motorului trifazat fără perii
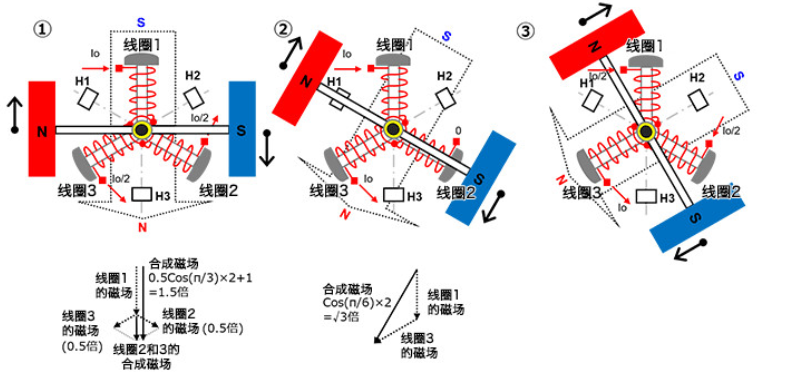
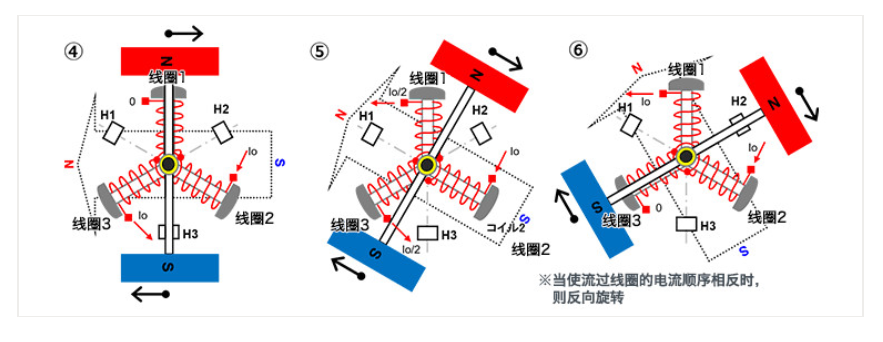
Principiul de rotație al motorului fără perii va fi explicat în următorii pași de la ① la ⑥. Pentru o înțelegere ușoară, magnetul permanent este simplificat de la un cerc la un dreptunghi aici.
①
Într-o bobină cu trei faze, bobina 1 să fie fixată la ora 12, bobina 2 fixată la ora 4 și bobina 3 fixată la ora 8. Lăsați polul N al magnetului permanent cu 2 poli să fie pe partea stângă și polul S pe partea dreaptă și rotativ.
Faceți curentul Io să curgă în bobina 1 pentru a produce câmpul magnetic S-pol pe exteriorul bobinei. Lăsați curentul Io/2 să curgă din bobina 2 și bobina 3 pentru a produce un câmp magnetic de poli N în exteriorul bobinei.
Atunci când câmpurile magnetice ale bobinelor 2 și 3 sunt sintetizate vectorial, câmpul magnetic de poli N este generat în jos, care este de 0,5 ori mărimea câmpului magnetic generat atunci când curentul Io trece printr-o bobină și devine de 1,5 ori mărime atunci când este adăugat la câmpul magnetic al bobinei 1. Acest lucru produce un unghi sintetic de 90° care poate atinge un unghi magnetic de maxim 90° cu magnetul permanent. fie generat și magnetul permanent se rotește în sensul acelor de ceasornic.
Când curentul din bobina 2 este redus și curentul din bobina 3 este crescut în funcție de poziția de rotație, câmpul magnetic sintetic se rotește și în sensul acelor de ceasornic și magnetul permanent continuă să se rotească.
②
În starea de rotire de 30°, curentul Io curge în bobina 1, astfel încât curentul din bobina 2 este zero, determinând curentul Io să curgă din bobina 3.
Partea exterioară a bobinei 1 devine polul S, iar partea exterioară a bobinei 3 devine polul N. Când vectorul este sintetizat, câmpul magnetic produs este de √3 (≈1,72) ori câmpul magnetic produs atunci când curentul Io trece printr-o bobină. Aceasta produce, de asemenea, un câmp magnetic sintetizat la un unghi de 90° în raport cu câmpul magnetic al magnetului permanent și se rotește în sensul acelor de ceasornic.
Când curentul de intrare Io al bobinei 1 este redus în funcție de poziția de rotație, curentul de intrare al bobinei 2 crește de la zero, iar curentul de ieșire al bobinei 3 crește la Io, câmpul magnetic sintetic se rotește, de asemenea, în sensul acelor de ceasornic, iar magnetul permanent continuă să se rotească.
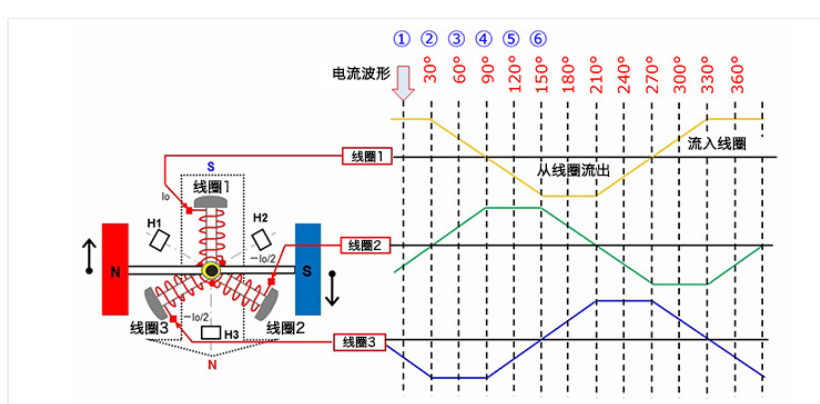
Presupunând că curentul în fiecare fază este sinusoidal, valoarea curentului aici este Io × sin(π⁄3) = Io × √3⁄2. Prin sinteza vectorială a câmpului magnetic, dimensiunea câmpului magnetic total este (√3⁄2)2 × 2 = 1,5 ori câmpul magnetic generat de o bobină. Când curenții din fiecare fază sunt sinusoidali, mărimea câmpului magnetic de sinteză vectorială este de 1,5 ori mai mare decât câmpul magnetic produs de o bobină, indiferent de poziția magnetului permanent, iar câmpul magnetic este la un unghi de 90° față de câmpul magnetic al magnetului permanent.
③
În starea în care rotația a continuat timp de 30°, curentul Io/2 curge în bobina 1, curentul Io/2 curge în bobina 2 și curentul Io curge din bobina 3.
Partea exterioară a bobinei 1 devine polul S, partea exterioară a bobinei 2 devine, de asemenea, polul S, iar partea exterioară a bobinei 3 devine polul N. Când vectorul este sintetizat, câmpul magnetic produs este de 1,5 ori mai mare decât câmpul magnetic produs atunci când curentul Io trece printr-o bobină (la fel ca ①). Și aici, un câmp magnetic sintetic este generat la un unghi de 90° față de câmpul magnetic al magnetului permanent și se rotește în sensul acelor de ceasornic.
④~⑥
Rotiți în același mod ca de la ① la ③.
În acest fel, dacă curentul care curge în bobină este comutat continuu secvențial în funcție de poziția magnetului permanent, magnetul permanent se va roti într-o direcție fixă. În mod similar, dacă curentul este inversat și direcția câmpului magnetic sintetic este inversată, acesta se va roti în sens invers acelor de ceasornic.
Următoarea diagramă arată curenții din fiecare bobină pentru fiecare dintre pașii de la ① la ⑥ de mai sus, succesiv. Relația dintre schimbarea curentă și rotație ar trebui înțeleasă prin descrierea de mai sus.
Stepper motors
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Structura motorului pas cu pas (bipolar bifazat)
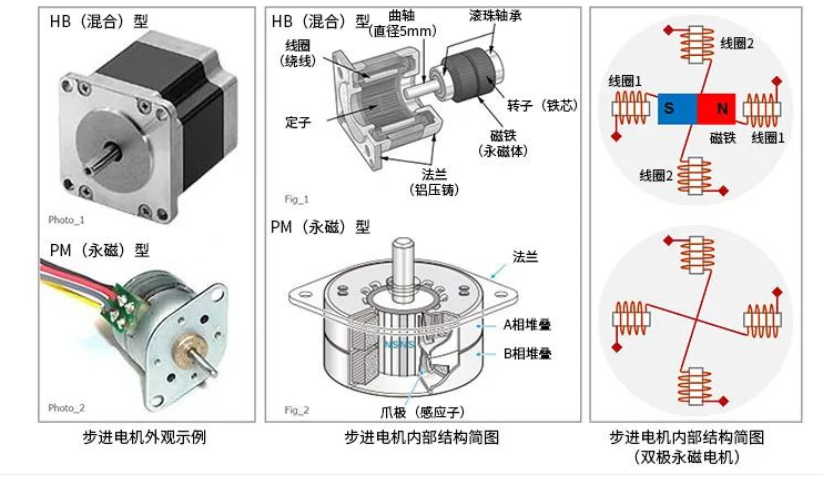
Următoarele diagrame, de la stânga la dreapta, arată un exemplu de aspect al unui motor pas cu pas, o schiță a structurii interne și o schiță a conceptului de structură.
În exemplul de aspect, este dat aspectul motoarelor pas cu pas de tip HB (hibrid) și PM (magnet permanent). Diagrama de structură din mijloc este dată și pentru tipul HB și tipul PM.
Motorul pas cu pas este o structură în care bobina este fixată și magnetul permanent se rotește. Diagrama conceptuală a structurii interne a unui motor pas cu pas din dreapta este un exemplu de motor PM care utilizează două faze (două seturi) de bobine. În exemplul de bază al structurii motorului pas cu pas, bobinele sunt configurate la exterior, iar magneții permanenți sunt configurați în interior. Pe lângă bobinele cu două faze, există și tipuri cu un număr mai mare de faze, cum ar fi trifazate și cinci faze.
Unele motoare pas cu pas au alte structuri diferite, dar structura de bază a motorului pas cu pas este dată în această lucrare pentru a facilita introducerea principiului său de funcționare. Prin această lucrare, sperăm să înțelegem structura de bază a motoarelor pas cu pas cu bobine fixe și magneți permanenți rotativi.
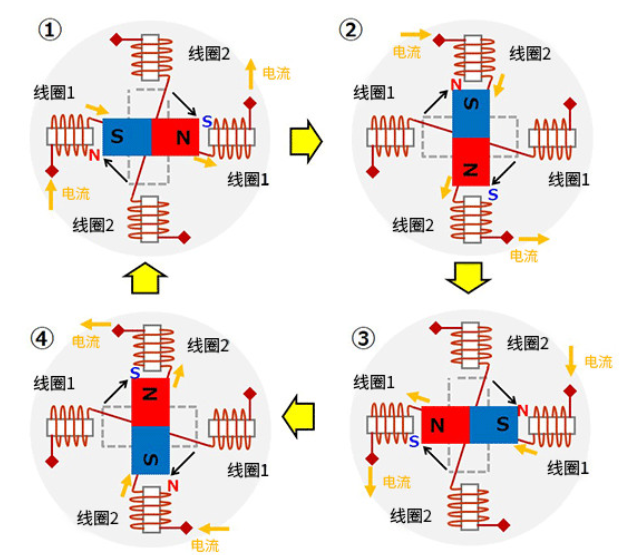
Principiul de funcționare de bază al motorului pas cu pas (excitație monofazată)
Următoarea diagramă este utilizată pentru a introduce principiul de bază de funcționare al unui motor pas cu pas. Acesta este un exemplu de excitație pentru fiecare fază (set de bobine) a bobinelor de tip bipolar cu două faze de mai sus. Premisa diagramei este că starea se schimbă de la ① la ④. Bobinele constau din bobina 1 și, respectiv, bobina 2. În plus, săgețile de curent indică direcția fluxului de curent.
①
・Faceți curentul să curgă din partea stângă a bobinei 1 și din partea dreaptă a bobinei 1.
・Nu lăsați curentul să circule prin bobina 2.
・În acest moment, partea interioară a bobinei din stânga 1 devine N, iar partea interioară a bobinei din dreapta 1 devine S.
・Ca urmare, magnetul permanent din mijloc este atras de câmpul magnetic al bobinei 1 și se schimbă în partea stângă S și în partea dreaptă N și se oprește.
②
・Curentul bobinei 1 este oprit astfel încât curentul să intre din partea superioară a bobinei 2 și să iasă din partea inferioară a bobinei 2.
・Partea interioară a bobinei superioare 2 se schimbă în N, iar partea interioară a bobinei inferioare 2 se schimbă în S.
・Magnetul permanent este atras de câmpul său magnetic și se rotește cu 90° în sensul acelor de ceasornic pentru a se opri.
③
・Curentul bobinei 2 este oprit astfel încât curentul să intre din partea dreaptă a bobinei 1 și să iasă din partea stângă a bobinei 1.
・Partea interioară a bobinei din stânga 1 devine S, iar partea interioară a bobinei din dreapta 1 devine N.
・Magnetul permanent este atras de câmpul său magnetic și se rotește în sensul acelor de ceasornic cu încă 90° pentru a opri.
④
・Opriți curentul din bobina 1, astfel încât curentul să intre din partea inferioară a bobinei 2 și să iasă din partea superioară a bobinei 2.
・Partea interioară a bobinei superioare 2 devine S, iar partea interioară a bobinei inferioare 2 devine N.
・Magnetul permanent este atras de câmpul său magnetic și se rotește în sensul acelor de ceasornic cu încă 90° pentru a opri.
Motorul pas cu pas poate fi rotit prin comutarea curentului care circulă prin bobină de către circuitul electronic, în ordinea de la ① la ④ de mai sus. În acest exemplu, fiecare acțiune de comutare face ca motorul pas cu pas să se rotească cu 90°.
În plus, atunci când curentul curge continuu printr-o bobină, starea de oprire poate fi menținută și motorul pas cu pas poate avea un cuplu de menținere. De altfel, dacă ordinea curentului care curge prin bobină este inversată, motorul pas cu pas poate fi făcut să se rotească în sens invers.
Găsiți un producător profesionist de motoare industriale - Dongchun motor China
 Salt la conținut
Salt la conținut