 ወደ ይዘት ዝለል
ወደ ይዘት ዝለል 
የኮከብ-ዴልታ ቡክ ጅምር, ዋና ባለሙያዎችን, ዋና የወረዳ ቧንቧ ባለሙያ, ኮከብ ጀምር ተከላካይ እና የሶስት ማእዘን አከባቢ ተከላካይ
የጊዜ መዘግየት ለመቆጣጠር ጊዜን ለመቆጣጠር የተቻለውን ጊዜ መጠቀም ተመራጭ ነው, እናም ዋናውን የወረዳ ጣቢያው ሞተርን ለመጠበቅ ከልክ በላይ ጫና ከልክ በላይ በተጫነ ጨዋታ መሞቅ አለበት.
የኮከብ-ዴልታ ደረጃ-ወደ ጀማሪው በመደበኛነት በሚተላለፉ ውቅር ውስጥ ለሚሮጡ የኤሌክትሪክ ሞተሮች ብቻ ተስማሚ ነው.

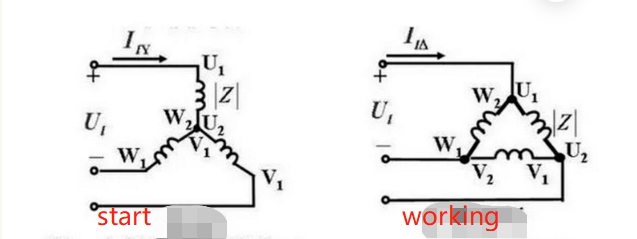
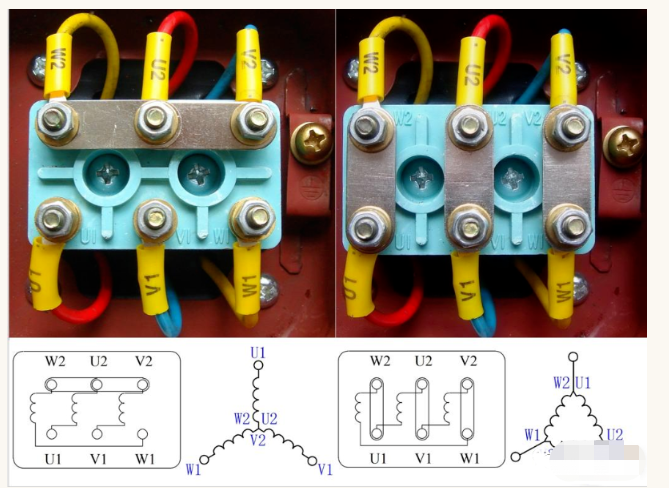
በመጀመሪያ የመነሻው ሞተር ውስጣዊ ነፋሳትን እንመለከታለን.
በሁለቱም ኮከብ እና ባለሦስት ማእዘን ግንኙነቶች ውስጥ በሶስት-ደረጃ አመካ ሞተር ውስጥ ሶስት ውስጣዊ የሞተር ነፋሳት አሉ.
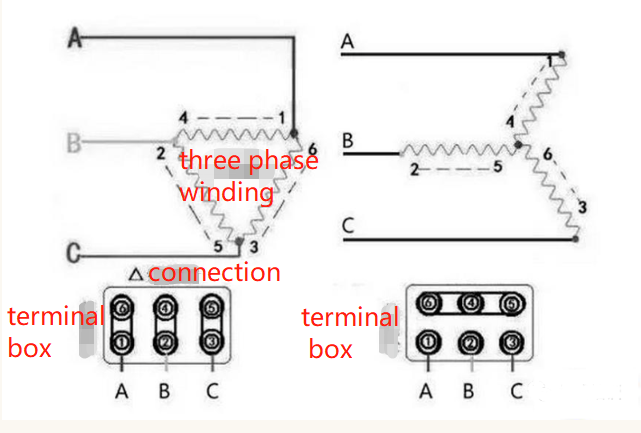
ኮከብ እስከ መጨረሻው የሚተላለፉበት ቦታ ነው.
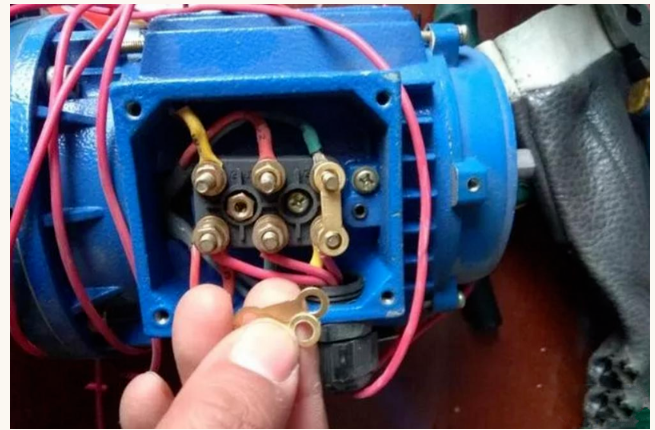
በሽቦዎች ሲበቅሉ እነዚህን ሶስት ማገናኘት ቁርጥራጮች ያስወግዱ.
ለዋናዎች ክፍል ክምችት ላይ ትኩረት ይስጡ, ቢጫ, አረንጓዴ እና ቀይ ሽቦዎችን መጠቀም የተሻለ ነው.
ከላይ ከተጠቀሰው የሆርዐተሩ የላይኛው ክፍል ውስጥ አንድ ላይ እንደ አንድ ነጥብ የተቆራኘ ነው, ሦስቱ ነጥቦች ከሞተር W2, v2, v2 ጋር ተገናኝቷል, ይህ ነጥብ የኮከብ ግንኙነት ነው, ይህ ነጥብ ገለልተኛ ነጥብ ተብሎ ይጠራል.
ኮከብ ጅምር የ voltage ልቴጅ እና የአሁኑን ይቀንሳል, ስለሆነም የመረጃ ቋቱ ሞተር በቀላሉ ይጀምራል.
አንድ ጊዜ ከተጀመረ, ተለያይቷል 3 ተለያይቷል, ተለያይቷል 2 ተገንብቷል እና ተያይ is ል 1 ተገንብቷል.
ቁ. 2 እና 2 ተከላካዮች ከተያዙ በኋላ ሦስቱ የተገናኙት የነበሩት ነፋሳት ባለሦስት ማዕዘንቋይ ግንኙነት ሁን እና የመነሻ ሞተር በመደበኛነት ሙሉ በሙሉ በ vol ልቴጅ ሊሰራ ይችላል.
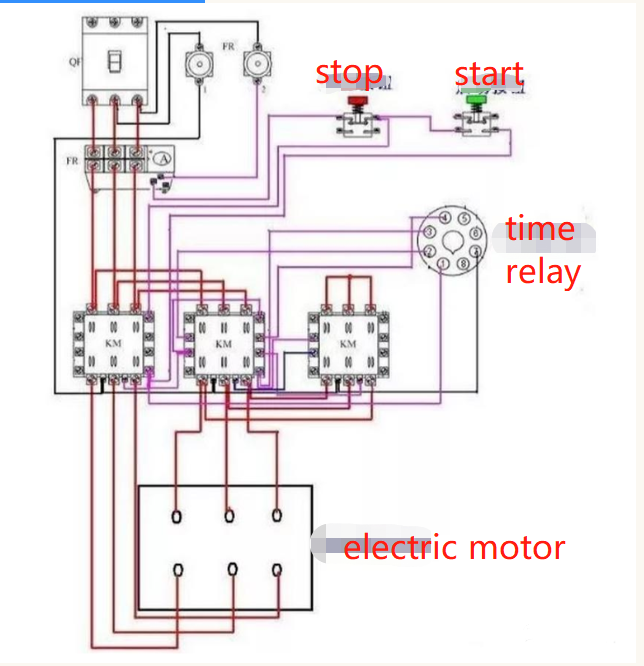
እዚህ የተሟላ ሽቦ እንመለከተዋለን.
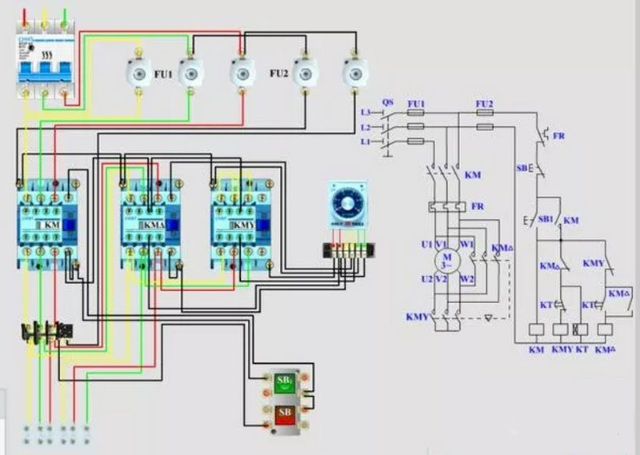
ይህ የተሟላ ሽቦ ነው.
የሙቀት ጫጫታ Ready በሁሉም ደረጃዎች ውስጥ ከተመሳሳዩ የመረጃ ቅደም ተከተል ጋር ከተያያዙት ዋና ዋናዎች ጋር የተገናኘ ነው.
ከላይ ያለው ቢጫ, አረንጓዴ እና ቀይ ሥዕላዊ መግለጫው ዋናውን የመስመር ክፍልን ያሳያል እናም ጥቁር መስመር የሁለተኛ ደረጃ መስመር ክፍል ነው.
የኤሌክትሪክ ሞተሮች ኮከብ-ዴልታ የሚያደርጉ ሁለት አስፈላጊ ባህሪዎች አሏቸው.
ኮከቡ እና ከመጀመራቸው ጀምሮ ሁለቱም ከሚሰጡት የአሁኑ አንድ ሦስተኛ የሆነ አንድ ሦስተኛ ሆኗል.
የሙቀት ጫጫታ Ready በሁሉም ደረጃዎች ውስጥ ከተመሳሳዩ የመረጃ ቅደም ተከተል ጋር ከተያያዙት ዋና ዋናዎች ጋር የተገናኘ ነው.
ከዚህ በላይ ያለው ንድፍት ቢጫ አረንጓዴ-ቀይ ዋና ዋና የመስመር ክፍልን ያሳያል እና ጥቁር መስመር የሁለተኛ መስመር መቆጣጠሪያ መስመር ክፍል ነው.
ኮከብ-ዴልታ ጅምር ያለው ሞተር ሁለት አስፈላጊ ባህሪዎች አሉት-ኮከቡ የአሁኑን ጅምር እና ጅማሬው ከሁለቱ በፊት አንድ ሦስተኛ ሆኗል.
የመነሻው ጅምር በጣም ትንሽ ነው ሊታይ ይችላል.
ስለዚህ ኮከብ-ዴልታ ጀምሮ ሞተር ጅረት ጅራቱ በጥብቅ የማይፈለግበት ካልሆነ በስተቀር ተስማሚ ነው, ግን የመነሻው ሁኔታ ውስን መሆን ያለበት ቦታ.
ጭነቱ በተነሳው ጊዜ በጣም ከባድ ከሆነ, ከደረጃው አውሮፕላን ውስጥ እስከ አንድ ሶስተኛ ደረጃ ሲደርስ, ሞተሩ እስከ አንድ ሦስተኛ የሚወስድ ከሆነ, ጭነቱ በጀማሪ ውስጥ በሚጀመርበት ጊዜ እና በከባድ አጫውት ውስጥ ብርሃን በሚኖርበት ጊዜ ጥቅም ላይ አይውልም. ሞተሩ በጣም ከፍተኛ ከሆነ, በ vol ልቴጅ ውስጥ በፍርግርግ ውስጥ ፍርግርግ ያስከትላል, በዚህ ጉዳይ ደግሞ ከኮማ-ዴልታ ይጠቀማል.
በሚከተለው ንድፍ ውስጥ ያለበትን ጊዜ ማሳወቅ.
ስለዚህ የኮከብ-ዴልታ አስጀማሪ ሞተር ጅራቱ በጥብቅ የማይፈለግበት ሳይሆን የመነሻው ቀን ውስን መሆን አለበት.
ስለዚህ, ኮከብ-ዴልታ ከጀምር ለመወሰን የሞተር ኃይል መጠን ማመንጨት አይቻልም. ሸክሙ ሲጀምር ሸክሙ በጣም ከባድ ከሆነ ሞተር መሸከም አልቻለም ምክንያቱም ሲሮም ሲጀምሩ ጭነቱ ብርሃን በሚሆንበት ጊዜ ጥቅም ላይ ውሏል. ሞተሩ በጣም ከፍተኛ ከነበረ, በፍርግርግ vol ልቴጅ ውስጥ ቅልጥፍና ያስከትላል, በዚህ ጉዳይ ደግሞ ከኮማ-ዴልታ ይጠቀማል.

በጣም በቀላሉ የተገለፀው የጊዜ ገዳይ ለክፉ ክምችት ትኩረት ይስጡ.
እነዚህን ጉዳዮች ለማብራራት በመጀመሪያ አንዳንድ መሠረታዊ የኤሌክትሪክ ፅንሰ-ሀሳብ መከለስ አለብን.
ከዚህ በታች ያለውን ሥዕላዊ መግለጫ ይመልከቱ እና በጠቅላላው የግንኙነት ዘዴዎች ውስጥ ለሶስት-ደረጃ ጭነት ወረዳዎች መካከል ያለውን ግንኙነት በመረዳት እንጀምር.
ሸክሙ ካልተለወጠው በቻይና ውስጥ የተጠቀመውን የአሁኑን ሶስት-vol ልቴጅ (TNS) የኃይል አቅርቦትን (STAN "የሚባለውን የመገልገያ (የ Startion Voltage) የኮከቡ የግንኙነት መጫወቻዎች የ Stoot voltage ትኔጅ ውስጥ አንድ ሦስተኛ የሚሆነው. አንግል ትስስር ከመስመር voltage ልቴጅ ጋር እኩል በሚሆንበት በሁለቱም ወደ ጭነቱ ጫፎች ተጨምሯል.
ለተመሳሳዩ ጭነት, በኮከብ ሁኔታ ውስጥ በተገናኘው የጊዜ ሰሌዳው ውስጥ የሚፈስበት የጊዜ ገፅ ውስጥ ከሚያስገባው የጊዜ ሰሌዳው ውስጥ እኩል ነው (እዚህ ያለው የመለኪያው ሁኔታ) ከተገናኘውበት ጊዜ አንፃፊው ተመሳሳይ ነገር ነው, ምክንያቱም ሁለቱ ተመሳሳይ ነገር ብቻ ናቸው, አገላለጹ ብቻ የተለየ ነው).
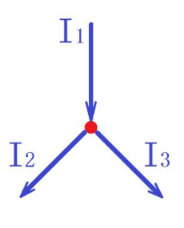
ቀጥሎም የ Kirchoffffff ንሽን የአሁኑን ሕግ እንከልስ, ከዚህ በታች ያለውን ሥዕላዊ መግለጫ ይመልከቱ. ከእያንዳንዱ መስቀለኛ መንገድ (እቅድ) ውስጥ ያለው የአሁን መስቀለኛ መንገድ ከእያንዳንዱ መስቀለኛ መንገድ ጋር አብሮ የሚፈስበት የአሁን መስመር (ኮምፒተርን) ከዜሮ (ኤ.ኦ.ሲ. (ኤ.ኦ.ኦ.ኦ.ኦ.ኦ.ኦ.ኦ.ዲ.) ጋር እኩል ነው ተብሏል.
የሶስት-ደረጃ አደባባይ-ዋሻ ሞተር ውስጥ ያለውን የጋራ አውሎ ነፋሻዎች የተለመዱ ኮከቦችን እና አንግልን እንመልከት.
ብቃት ያለው ኤሌክትሪክ ባለሙያ መምህር መሆን ያለበት ከመሠረታዊ ዕውቀት አንዱ የመረጃው ግንኙነት ይህ ነው. መሣሪያዎቻቸውን በተሻለ ሁኔታ ማገልገል እንዲችሉ ለወደፊቱ የማምረቻ ልምምድ ውስጥ በመድረስ ለወደፊቱ የምርት (ሥራ) ውስጥ የመሣሪያዎቻችንን መቀጠል እንችላለን.
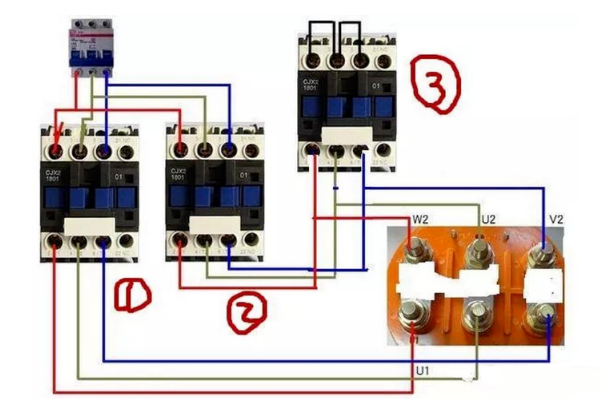
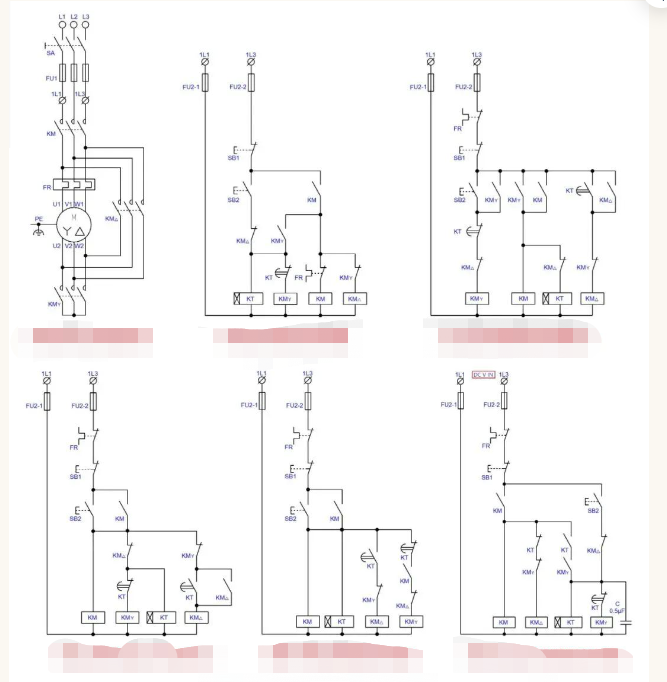
ቀጣዩ እርምጃ የኮከቡ / ዴልታ ደረጃ-ወደ ታችኛው ጀማሪ ትንተና መጀመር ነው, ከዚህ በታች ያለውን ሥዕላዊ መግለጫ ይመልከቱ.
በግራ በኩል ባለው የግራ መስመር ላይ የመጀመሪያው ዋና ዋና መቆጣጠሪያ መደበኛ ኮከብ / ዴልታ ቡክ ዋነኛው ቁጥጥር የወረዳ ወረዳ ነው.
በግራ በኩል ያለው ሩት ረዳትነት መቆጣጠሪያዎች የመጀመሪያው እና የታችኛው ወገን ባህላዊ መደበኛ አጠቃላይ ረዳት ረዳት ረዳት ረዳት ማካካሻ ነው. ሁለተኛው እና ሦስተኛው አሁን በኅብረተሰቡ ውስጥ በሚሰራጭ ረዳት ረዳት ማሳያ ወረዳዎች ውስጥ አንዱ ናቸው. አራተኛው ወረዳውን ከመመዘኔ በኋላ የ he ረዳትነት ቁጥጥር ወረዳ ነው. ከመግደቁ በኋላ አምስተኛው ረዳትነት መቆጣጠሪያ ነው.
ማሳሰቢያ-የሥራ መደቡ መጠሪያ እንደ መደበኛ መስፈርቶች ሁሉ እንደ መደበኛ መስፈርቶች ሁሉ እንደሚያስፈልጉ, ሁሉም ሰው በጣም ትልቅ ስለሆነ, እና ሁሉም ሰው ሊረዳው እስከሚችል ድረስ ውይይቱ አስፈላጊ አይሆንም.
ቀሚሱ ሲዘጋ የኮከብ ደረጃን ወደታች የሚጀምር መደበኛ ኮከብ / ዴልታ ደረጃን / ዴልታ ደረጃን / ዴልታ ደረጃን ወደታች ይመልከቱ. በጠቅላላው የ vol ልቴጅ, በመንኛ ወቅታዊ ህግ መካከል ባለው የግንኙነት ውስጥ ባለው የግንኙነት ግንኙነቶች ውስጥ ባለው የቲኤምኤስ ዋና ዋና ውይይት የተጀመረው በኮከብ ነጥብ ውስጥ ባለው የኪስ ዋና አባባል ውስጥ ያለው የኮከብ ነጥብ እንደነበረ እናውቃለን.
ጭነቱ በሦስት አቅጣጫው ግንኙነት ውስጥ (በዚህ ሁኔታ የሞተር ነፋሱ), በመጫኑ ጫፎች መጨረሻ ላይ የተተገበረው የእሳት ልቴጅ የመስመር voltage ልቴጅ (I.E. 380v) ነው.
ወደ ኮከብ ግንኙነት ሲለዋወጥ (ጭነቱ እና ግቤት voltage ልቴጅ) የተሸጠው የእድገት ደረጃዎች (I.E. 220v) (I.E. 220) የ voltage ልቴጅ የ Vol ልቴጅ ቅነሳ መሠረት 1/3 የሚፈስበት የአሁኑ ነው.
የኮከብ ግንኙነት የመገናኛው ክፍል ከመስመር ወቅታዊው ጋር እኩል ነው, ይህ ማለት በ KME (ዋና ተከላካዮች ዋና መረጃዎች ውስጥ ያለው የአሁኑን የ KMY (የተዘጋ የኮድ ኮከብ ተከላካዮች) አማካይነት አንድ ነው ማለት ነው. ስለዚህ, የመመዛቢያ ወይም ያልተሰረቀ ወይም ያልተሰረቀ, በሁለቱ የከዋክብት ዋና እውቂያዎች ውስጥ የሚፈጥር ኤክስ ተመሳሳይ ነው, ቅስት የክርክሪት መዘጋት በማይመሳሰልበት ጊዜ ውስጥ ከ ARC ከሚወጣው ከ ARC ከሚወጣው የ Arc ውስጥ የማይቀባ መዘጋት የለም.
ስለዚህ, ትክክለኛ ምርጫ (ምርጫ) እና ብቃት ያለው አመልካች አጠቃቀምን, በተለመደው የተከላካይ አጠቃቀም ረገድ በተለመደው ሁኔታ ውስጥ በተለመደው ሁኔታዎች ውስጥ በተለመደው ሁኔታ ውስጥ አይታይም.
ሆኖም በምርት ልምምድ ውስጥ የተለመደው ንድፍ ካሚ ከ KM በፊት ያዘጋጃል. የዚህ ዓላማ የኪሚ እውቂያዎችን የአገልግሎት ህይወት ማራዘም ነው እናም የአሠራር ወጪዎችን ለመቀነስ ነው. መሠረታዊው መሠረታዊው በ CARGAL ኦፕሬቲንግ ወቅታዊ ወቅታዊ መሠረት መመረቡ ነው, ኪሚ በተመረጠው የኮከቡ ግንኙነት ወቅታዊ መሠረት ሲመረጥ ነው. KMY ከ KM በፊት ቢዘጋ, የመነሻ-ተጭኖ የማይዘጋጅ (ኮከቡ / አንግል / አንግል ማብሪያ / ማጥፊያ) ከ KMY ይልቅ ከ KMY ይልቅ ከ KMY ይልቅ እጅግ በጣም የተሻሉ ናቸው.
በኮከብ / አንግል ውስጥ የኪሚ ንድፍ ከኪስ ጋር ሲቀየር ቀሚስ ያላቅቁ ከሆነ ከዚያ በኋላ ጁዲሊየን ያላቅቁ (ምክንያቱም ARC በጣም ትላልቅ ቅጂዎች ውስብስብነት እና ኢኮኖሚያዊ ወጪ ጭማሪ, አንዳንድ ጊዜ ኪሳራ ከሚያስቆጭ በላይ.
ከ KM △ ጋር የግንኙነት አስተዳደር እንደገና ይመልከቱ. እንደ አንጓው ግንኙነት በ KM በኩል በሚፈስበት ጊዜ ዋናው ግንኙነት ደህንነቱ የተጠበቀ እና አስተማማኝ ለመሆን ከመደበኛ 3 ክፍሎች ስር ጋር እኩል ነው, ይህም በመስመር ላይ ወቅታዊ መረጃ መሠረት ይመርጥቃል.
ይህ የሆነበት ምክንያት ቅስት በውይይት ሂደት ወቅት የበለጠ ስለሚሆን እና የተሽከርካሪውን ግንኙነቶች በቀላሉ ሊያቃጥል ይችላል. በእርግጥ ኪ.ሜ. ኪ.ሜ. ካ.ሜ. ከ KM, ኪ.ሜ.
ነገር ግን ይህ የመቆጣጠሪያ የወረዳ አወቃቀር ውስብስብ ያደርገዋል, የመሣሪያ ማምረቻ ወጪዎች ከትርፍዎች ይልቅ የበለጠ ኪሳራ ለመስራት በቂ አይደለም.
የኮከቡ / የዴልታ ቡክ ጅምር ዋናው ማጠቃለያ ትንታኔ በተለመደው ሁኔታ ውስጥ የተካነ እና ብቃት ያላቸው ምርቶች ትክክለኛ ምርጫ እስካሁን ድረስ ካም እና የኪሚ ማመሳሰል እርምጃ መግባባት ያስከትላል.
እንደ እውነቱ ከሆነ, የመቀጠል ብዙ ምክንያቶች አሉ, ግን ዋናው ኮከቡ / አንግል ልወጣ ጊዜ በትክክል ካልተዋቀረ, ወይም ሸክሙ በጣም ከባድ ነው.
የመነሻ ጊዜው በጣም ቀደም ብሎ ለመለወጥ በቂ አይደለም; አንዳንዶቹ የሞተር ራሱ ባሕርይ ወይም የተለመደው ጥገና ብቻውን በቂ አይደለም, የአሁኑ የአሁኑ ትልልቅ ይሆናል, እርግጥ ነው, ከረጅም ጊዜ በላይ የተሞላበት ሥራ የሚካፈለው ሞተር ወይም ምክንያታዊ ያልሆነ ንድፍ, የተካናነተ ሥራን በመጠገን ሥራ ላይ የማያውቁ ዲዛይን ወይም ዓይነቶችን በማካተት መስፈርቶቹን አያሟላም.
በተጨማሪም የኮከብ / ዴልታ Vol ልቴጅ መቀነስ መጀመሩ የተወሰኑ የትግበራ ክልል ካለባቸው እና የግድ ከሌላው የ Vol ልቴጅ መቀነስ የመነሻ ዘዴዎች አይደሉም. ምክንያቱም የኮከብ / ዴልታ vol ልቴጅ ቅነሳ (እንደ ፓምፖዎች ወይም የአየር ማጫዎቻዎች) የሚተገበር ነው.
በጣም በተጫነ የመነሻ መሳሪያዎች, ከ 30 ሰከንዶች በላይ (በተለይም ከ 1 ደቂቃ የሚበልጡ) ጉዞዎች በሞተር እና በአቅርቦት መስመሩ ላይ ትልቅ ተፅእኖ አላቸው (በተለይም የአቅርቦት ትራንስፎርሜሽን ከአቅም በላይ ከሆነ).
ስለዚህ, ጭነቱ ከባድ (ወይም ከፍ ያለ ኃይል) ሞተር, ሌሎቹ የመነሻ ዘዴዎች [ኢ.ኢ.ግ. የራስ-ሰር የጎን ማቅረቢያ ቡክ ጅምር, ስታግኛ ተከታታይ ዋና, ስቴተር የተቀየረ የጀልባ ጅምር, ወዘተ: ድግግሞሽ መለወጫ ጅምር
ስለዚህ, ኮከብ / ዴልታ ቡክ መነሻ ከሌላው የመነሻ ዘዴዎች በጣም የተሻሉ ናቸው ብሎ ማሰብ የተሳነው የተሳሳተ ግንዛቤ ነው,
ምንም እንኳን ጠለፋ እስከ መጨረሻው ድረስ ምንም ዓይነት መሳሪያ ቢሠራም, ሁሉም ኮከብ / ዴልታ ቡክ መነሻ ዘዴዎች ጥቅም ላይ ውለዋል ብሎ ማሰብ ስህተት ነው (የከዋክብት / የዴልታ ቡክ መጀመሪያ ቀላሉ መዋቅር እና አነስተኛ መጠን ያለው).
የሚከተለው ለ START / ዴልታ Buck ረዳት / ዴልታ Buck ረዳት / ዴልታ Buck ረዳትነት መቆጣጠሪያ ማብራሪያ ነው.
የመቆጣጠሪያ ወረዳ ተብሎ የተጠራው ረዳትነት የሚጠቀስ ረዳት ቁጥጥር ወረዳው በሂደቱ ፍላጎቶች መሠረት የሚቆጣጠረው ዕቃውን የሚቆጣጠር መሆኑን የሚቆጣጠር ወረዳ ነው. ከላይ የተገለጹት አምስት የመቆጣጠሪያ ዘዴዎች በወረዳ ግንባታ ውስጥ ብቻ, አራተኛው ሶስት ናቸው, አራተኛው ሦስት የመለያ ገንዳ መዘግየት መዘግየት መዘግየት እና የመጨረሻዎቹ ሶስት የመቆጣጠሪያ ገበያዎች.
ዋናው የመቆጣጠሪያ ወረዳው ዋናውን አውራጃ (ኪ.ሜ) ዋነኛው ኮከብ (ኪሜ) ዋናውን አውራጃ ከ Buck ጅምር ጋር ለማቅረብ ከተዘጋጀ ባህላዊ, መደበኛ ቁጥጥር ውህደት ነው, እና ከመጀመሪያው በኋላ ወደ አንፃር ክወና እና የጊዜ ገዳይ የተሟላ መዞሪያ ነው.
ይህ ወረዳ አንድ ቀላል የወረዳ ፅንሰ-ሀሳብ አለው አሁንም ደህንነቱ የተጠበቀ እና አስተማማኝ ሥራ ባህርይ ያሟላል.
ሁለተኛው እና ሦስተኛው ቁጥጥር ወረዳዎች ሁለቱም ከዋክብት ወደ ታች ወደ ታች ከመጀመሩ በፊት ኮከቡን ከመቅረቡ በፊት ሁለቱንም ኮከቡን ለመጀመሪያ ጊዜ በማተም ረገድ, እና ጅምር ከተጠናቀቀ በኋላ.
ልዩነቱ የወረዳ አሠሪው በጣም የተወሳሰበ ስለሆነ አንዳንድ ድርብ ሰንሰለት እውቂያዎችን በመጨመር, የበለጠ ድርብ ሰንሰለት እውቂያዎችን በመጨመር ነው.
በተለይም, ሁለተኛው ቁጥጥር ወረዳ, በጣም የተጠቀሙባቸው እውቂያዎች, ምንም እንኳን ደህንነት እና አስተማማኝነት ብዙ ቢጨምርም, ግን ደግሞ ብዙ አስቸጋሪ የሆኑት ነገሮችም.
አራተኛው የተነደፈ ወረዳ ነው. ለዚህ ወረዳ እኔ በግሌ በጣም ምክንያታዊ እና ፍጹም እንዳልሆነ አስባለሁ.
ምንም እንኳን ሁለቴ ሰንሰለት ተግባሩ ቢታከም ዋናው ኮከብ ተከላካይ ኪ.ሜ. ከከዋሹ ኮከብ ተከላካይ ጁድ ውስጥ ይዘጋል, እናም ኮከቡን በመጀመሪያ ካላመዱ እና ከዚያ በኋላ የጀልባውን ጅምር ከማጥፋት የተሻለ ነው.
ምንም እንኳን ምንም ጉዳት የለውም, ነገር ግን ከመጀመሪያው ማኅተም ኮከብ ጋር ሲነፃፀር ከፊተኛው ማኅተም ኮከብ ጋር ሲነፃፀር ከተዋዋስ ካህኑ ጋር የተያዥው ካህኑ ከሚያድጉ ህይወት የበለጠ አጭር ናቸው (ከ ACC መብራት ጋር እኩል የሆነ ሥራን ከእጥፍ በላይ ነው).
የረጅም ጊዜ ተሳትፎ የዚህ ወሳተኛውን የረጅም ጊዜ ተሳትፎ የዚህ ወረዳ ከባድ አካል ነው.
እንደምናውቀው, ያለማቋረጥ ኃይል ያለው እና በሥራ ላይ የሚሳተፈው የአንድ አካል ሕይወት ከሌለ የኃይል ፍጆታ ይጨምራል.
As the saying goes, "more incense burners, more ghosts", your time relay KT is involved in long-term operation, so it may give you a failure in operation at some point, affecting the efficiency of the equipment and increasing operating and maintenance costs.
አምስተኛው የወረዳው ነው.
ምንም እንኳን በድርጊቱ ሥራ እና በቀደሙት ሶስት ተመሳሳይነት ያለው, የኃይል እና የጊዜ ገዳይ ከተሠራው በኋላ የአራክ Angle conteriator KM School ን ለማራዘም ከመጀመሪያው የታሸገ ኮከብ ጋር, የግንኙነት ካቻኮተር ሐ አንድ እባብ ነው.
እና መዘግየቱ ተግባሩ በዲሲ አቅርቦት ቁጥጥር ስር ብቻ በዲሲ አቅርቦት ቁጥጥር ውስጥ ብቻ, ነገር ግን ሚና ወይም ቀድማዊ እና ደመወዝ እና ደመወዝ እና ደመወዝ እና ቀድመቶችም ቢሆን.
በስህተት ምክንያት የተከሰተውን የመረበሽ ወይም የመጥፋት መቼ እንደሚሰጥዎ አታውቅም.
በዲሲ ወረዳ ውስጥ የኢንፌክተሩ voltage ልቴጅ ከፍተኛው ደረጃ ከተሰጠው voltage ልቴጅ ከአምስት እስከ አምስት እጥፍ በላይ እንደሆነ ልብ ይበሉ.
ደህና, ያ ለእነዚያ ኮከብ / ዴልታ Buck The Mation ማሳያ ትንታኔዎች ነው.
ለማንኛውም መረጃ በአስተያየቶች ቦታ ውስጥ መልእክት ለመተው በደህና መጡ.
ስለ ኤሌክትሪክ ሞተር ማንኛውም ጥያቄ እባክዎን የባለሙያውን ኤሌክትሪክ ሞተር ያነጋግሩ አምራች ውስጥ ቻይና እንደሚከተለው:

ዶንግቹን ሞተር እንደ መጓጓዣ፣ መሠረተ ልማት እና ግንባታ ባሉ የተለያዩ ኢንዱስትሪዎች ውስጥ የሚያገለግሉ ሰፊ የኤሌክትሪክ ሞተሮች አሉት።
ፈጣን ምላሽ ያግኙ።






