 ข้ามไปที่เนื้อหา
ข้ามไปที่เนื้อหา 
เกือบครึ่งหนึ่งของการใช้พลังงานของโลกนั้นถูกใช้โดยมอเตอร์ไฟฟ้าดังนั้นประสิทธิภาพสูงของมอเตอร์ไฟฟ้าจึงถูกกล่าวว่าเป็นมาตรการที่มีประสิทธิภาพมากที่สุดในการแก้ปัญหาพลังงานของโลก
ประเภทของ มอเตอร์ไฟฟ้า
โดยทั่วไปมันหมายถึงการเปลี่ยนแปลงของแรงที่เกิดจากการไหลของกระแสในสนามแม่เหล็กเป็นแอ็คชั่นโรตารี่และในช่วงกว้างมันยังรวมถึงการกระทำเชิงเส้น
ขึ้นอยู่กับประเภทของแหล่งจ่ายไฟที่ใช้ขับมอเตอร์มีมอเตอร์ DC และ มอเตอร์ไฟฟ้า AC.
และตามหลักการหมุนมอเตอร์มันสามารถแบ่งออกเป็นหมวดหมู่ต่อไปนี้โดยประมาณ (ยกเว้นมอเตอร์พิเศษ)
มอเตอร์ DC Electric /DC (กระแสไฟฟ้าโดยตรง)
มอเตอร์แปรง
มอเตอร์แปรงที่ใช้กันอย่างแพร่หลายโดยทั่วไปเรียกว่ามอเตอร์ไฟฟ้า DC
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
มอเตอร์กระแสตรงไร้แปรงถ่าน
มอเตอร์ DC แบบไร้แปรงไม่ได้ใช้แปรงหรือเครื่องใช้ไฟฟ้า แต่ใช้ฟังก์ชั่นการสลับเช่นทรานซิสเตอร์เพื่อสลับกระแสและดำเนินการหมุน
ขั้นตอนมอเตอร์
มอเตอร์นี้ทำงานร่วมกันกับพลังงานชีพจรและดังนั้นจึงเรียกว่ามอเตอร์เหนี่ยวนำพัลส์
มันโดดเด่นด้วยความสามารถในการดำเนินการตำแหน่งที่แม่นยำได้อย่างง่ายดาย
มอเตอร์กระแสสลับ
มอเตอร์แบบอะซิงโครนัส
พลังงาน AC สร้างสนามแม่เหล็กที่หมุนได้ในสเตเตอร์ซึ่งจะสร้างกระแสไฟฟ้าที่เกิดขึ้นในโรเตอร์ซึ่งการหมุนปฏิสัมพันธ์เกิดขึ้นสำหรับมอเตอร์เหนี่ยวนำ AC
มอเตอร์ซิงโครนัส
พลังงาน AC สร้างสนามแม่เหล็กหมุนและโรเตอร์ที่มีขั้วแม่เหล็กหมุนเนื่องจากแรงดึงดูด
-ความเร็วในการหมุนได้รับการซิงโครไนซ์กับความถี่ของแหล่งจ่ายไฟ
เกี่ยวกับกระแสสนามแม่เหล็กและกองกำลัง
ประการแรกเพื่อประโยชน์ของคำอธิบายหลักการมอเตอร์ที่ตามมาลองทบทวนกฎหมาย/กฎหมายพื้นฐานเกี่ยวกับสนามแม่เหล็กและแรงในปัจจุบัน
แม้ว่าจะมีความรู้สึกถึงความคิดถึง แต่ก็เป็นเรื่องง่ายที่จะลืมความรู้นี้หากคุณไม่ได้ใช้ส่วนประกอบแม่เหล็ก
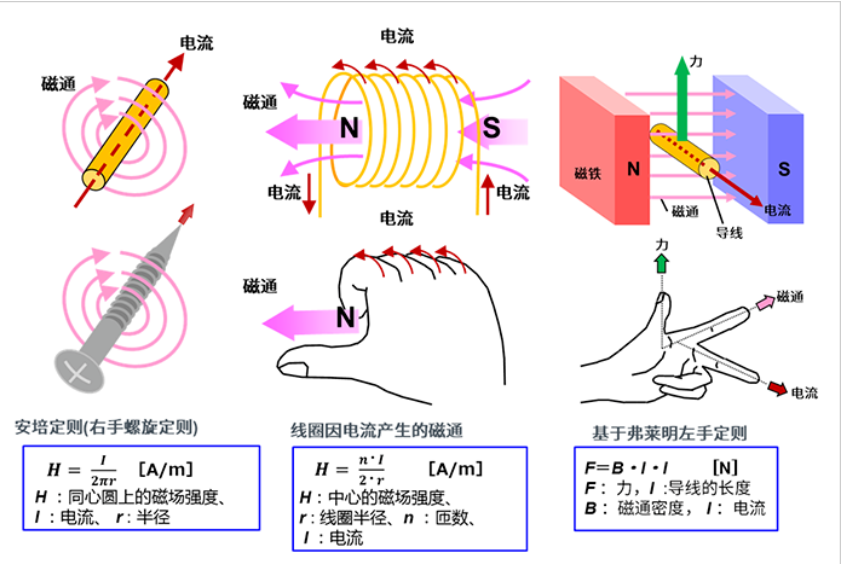
เรารวมรูปภาพและสูตรเพื่อแสดงให้เห็น
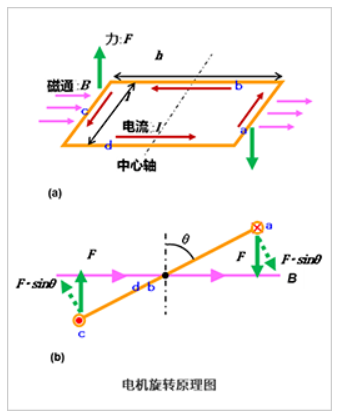
เมื่อเฟรมลวดเป็นรูปสี่เหลี่ยมผืนผ้าแรงที่กระทำในกระแสจะถูกนำมาพิจารณา
แรงที่ดำเนินการในส่วนของข้าง A และ C คือ
แรงบิดถูกสร้างขึ้นด้วยแกนกลางเป็นแกนกลาง
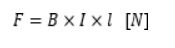
ตัวอย่างเช่นเมื่อพิจารณาสถานะที่มุมการหมุนเป็นเพียงθแรงที่ทำหน้าที่ในมุมขวาถึง B และ D คือsinθดังนั้นแรงบิดของ TA ของชิ้นส่วนจะได้รับโดย:
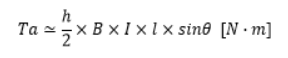
เมื่อพิจารณาส่วน C ในลักษณะเดียวกันแรงบิดจะเพิ่มขึ้นเป็นสองเท่าและสร้างแรงบิดที่คำนวณโดยสมการต่อไปนี้

เนื่องจากพื้นที่ของสี่เหลี่ยมคือ S = H ・ L การแทนที่มันลงในสมการด้านบนให้ผลลัพธ์ต่อไปนี้

สูตรไม่เพียงใช้กับสี่เหลี่ยม แต่ยังรวมถึงรูปร่างทั่วไปอื่น ๆ เช่นวงกลม มอเตอร์ใช้ประโยชน์จากหลักการนี้
มอเตอร์ไฟฟ้าหมุนได้อย่างไร?
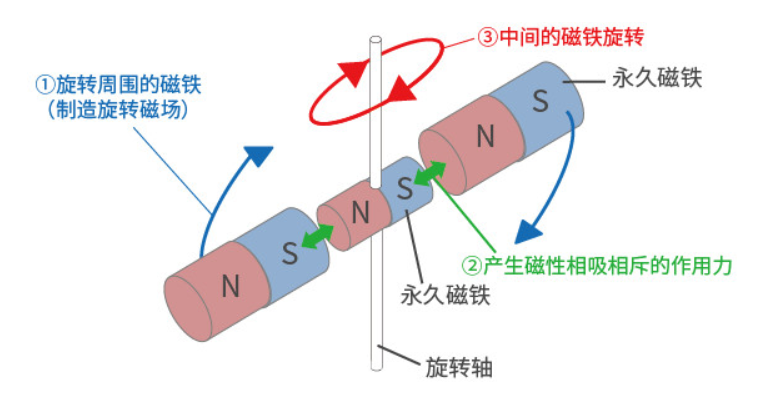
1) มอเตอร์เหนี่ยวนำหมุนด้วยความช่วยเหลือของแม่เหล็กและแรงแม่เหล็ก
รอบแม่เหล็กถาวรที่มีเพลาหมุน
①แม่เหล็กหมุน (เพื่อให้สนามแม่เหล็กหมุนถูกสร้างขึ้น)
②จากนั้นตามหลักการที่ว่าเสา n และ s ดึงดูดซึ่งกันและกันที่เสาต่าง ๆ และขับไล่ซึ่งกันและกันในระดับเดียวกัน
③แม่เหล็กที่มีเพลาหมุนจะหมุน
นี่คือหลักการพื้นฐานของการหมุนของมอเตอร์ AC
กระแสที่ไหลในตัวนำทำให้สนามแม่เหล็กหมุน (แรงแม่เหล็ก) รอบ ๆ มันและทำให้แม่เหล็กหมุนซึ่งเป็นจริงสถานะของการกระทำเช่นนี้
นอกจากนี้เมื่อลวดถูกแผลในรูปทรงของขดลวดแรงแม่เหล็กจะถูกสังเคราะห์ขึ้นสร้างฟลักซ์สนามแม่เหล็กขนาดใหญ่ (ฟลักซ์) ที่สร้างเสา N และ S
นอกจากนี้โดยการใส่แกนเหล็กลงในลวดเหมือนขดลวดแรงแม่เหล็กของแรงกลายเป็นเรื่องง่ายที่จะผ่านและสามารถสร้างแรงแม่เหล็กที่แข็งแรงขึ้นได้
2) มอเตอร์หมุนจริง
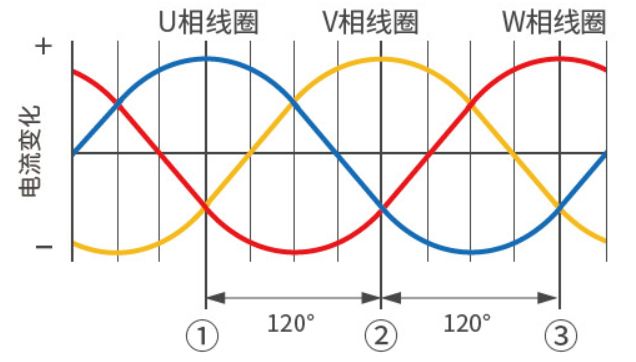
ที่นี่เป็นวิธีการที่ใช้งานได้จริงในการหมุนมอเตอร์เราแนะนำวิธีการสร้างสนามแม่เหล็กหมุนโดยใช้มอเตอร์ AC สามเฟสและขดลวด
(มอเตอร์อุตสาหกรรม AC สามเฟสเป็นสัญญาณ AC เว้นระยะห่าง 120 °ในเฟส)
สนามแม่เหล็กสังเคราะห์ในสถานะ①ด้านบนสอดคล้องกับรูป①ด้านล่าง
สนามแม่เหล็กสังเคราะห์ในสถานะ②ด้านบนสอดคล้องกับรูป②ด้านล่าง
สนามแม่เหล็กสังเคราะห์ในสถานะ③ด้านบนสอดคล้องกับรูป③ด้านล่าง
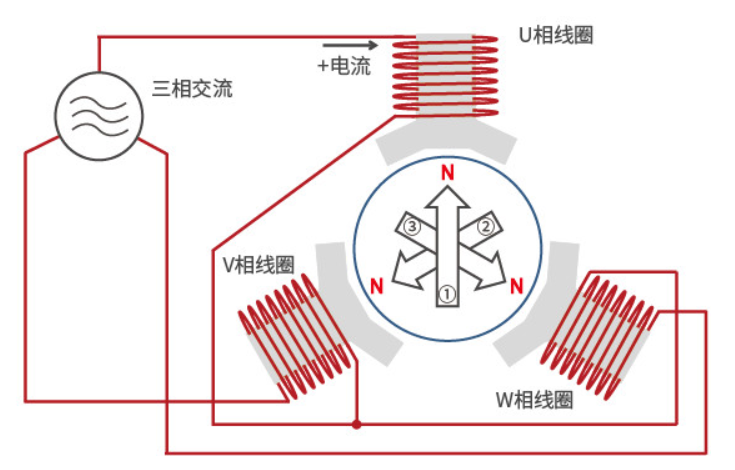
ดังที่ได้กล่าวไว้ข้างต้นขดลวดของแกนแผลแบ่งออกเป็นสามเฟสโดยมีการกำหนดค่าช่วงเวลา 120 °ของขดลวด U-phase, ขดลวด V-phase และขดลวด W-phase พร้อมขดลวดที่มีแรงดันสูง

แต่ละเฟสจะเปลี่ยนไปตามคลื่นไซน์ดังนั้นขั้ว (ขั้ว N, ขั้ว S) และสนามแม่เหล็ก (แรงแม่เหล็ก) ที่สร้างขึ้นโดยแต่ละขดลวดจะเปลี่ยนไป
ในเวลานี้ขดลวดที่สร้างขั้ว N เพียงอย่างเดียวการเปลี่ยนแปลงตามลำดับตามขดลวด U-phase → V-phase Coil → W-phase Coil → U-phase ขดลวดและการหมุนจึงเกิดขึ้น

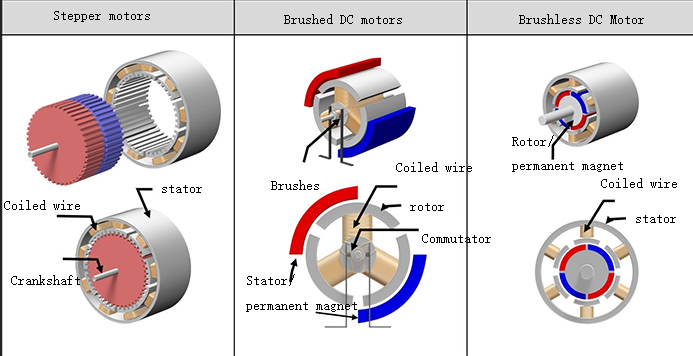
โครงสร้างของมอเตอร์ขนาดเล็ก
รูปต่อไปนี้ให้โครงสร้างโดยประมาณและการเปรียบเทียบมอเตอร์อุตสาหกรรมสามประเภท ได้แก่ มอเตอร์สเต็ปเปอร์, มอเตอร์ DC (DC) แปรงและมอเตอร์ DC (DC)
ส่วนประกอบพื้นฐานของมอเตอร์เหล่านี้ส่วนใหญ่เป็นขดลวดแม่เหล็กและใบพัดและยังมีประเภทการตรึงและแม่เหล็กที่มีการตรึงและแม่เหล็กขึ้นอยู่กับประเภท
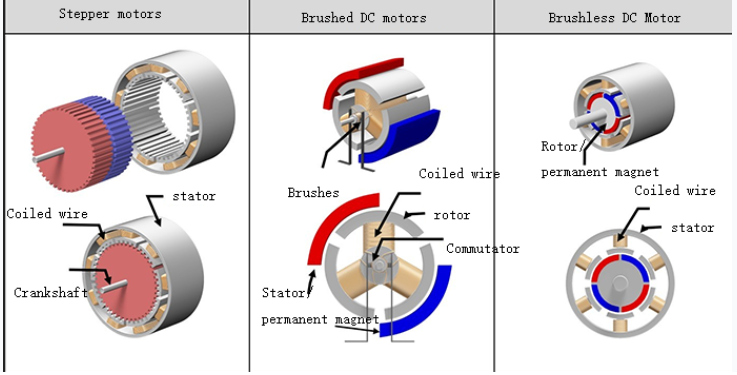
ต่อไปนี้เป็นคำอธิบายของโครงสร้างที่เกี่ยวข้องกับไดอะแกรมตัวอย่าง เนื่องจากอาจมีโครงสร้างอื่น ๆ หากแบ่งออกอย่างระมัดระวังมากขึ้นโปรดเข้าใจว่าโครงสร้างที่นำเสนอในบทความนี้อยู่ภายใต้กรอบขนาดใหญ่
ขดลวดของมอเตอร์สเต็ปเปอร์ที่นี่ได้รับการแก้ไขที่ด้านนอกและแม่เหล็กจะหมุนที่ด้านใน
ที่นี่แม่เหล็กของมอเตอร์ DC แปรงได้รับการแก้ไขที่ด้านนอกและขดลวดหมุนที่ด้านใน T
เขาแปรงและผู้ค้ามีหน้าที่รับผิดชอบในการจัดหาพลังงานให้กับขดลวดและเปลี่ยนทิศทางของกระแสไฟฟ้า
ในกรณีของมอเตอร์ไร้แปรงขดลวดจะถูกจับที่ด้านนอกและแม่เหล็กหมุนอยู่ด้านใน
โครงสร้างของมอเตอร์ไร้แปรงนั้นแตกต่างกันแม้ว่าส่วนประกอบพื้นฐานจะเหมือนกันเนื่องจากมอเตอร์ประเภทต่าง ๆ รายละเอียดจะถูกอธิบายในแต่ละส่วน
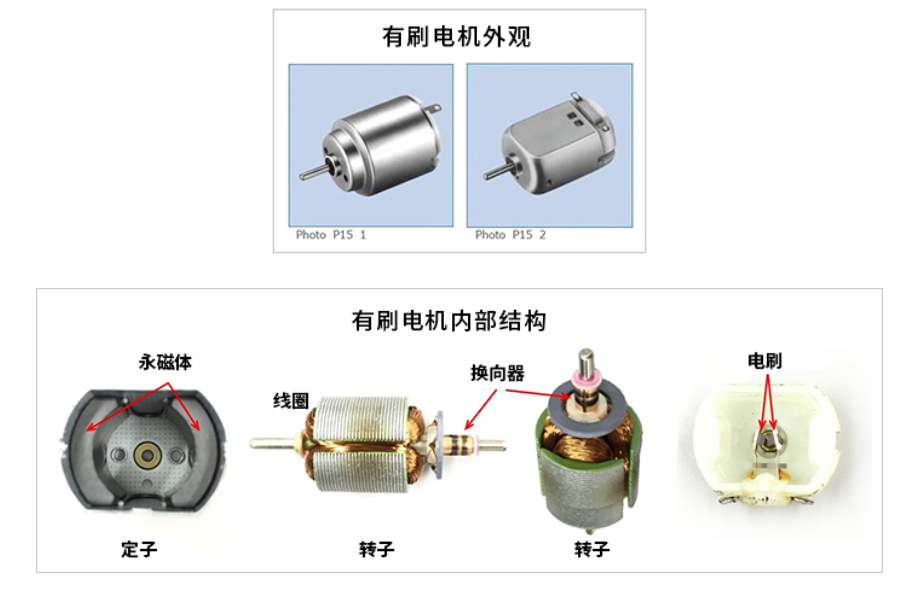
มอเตอร์แปรง
โครงสร้างของมอเตอร์ DC ที่ถูกแปรง
ด้านล่างคือการปรากฏตัวของมอเตอร์ DC ที่แปรงมักใช้ในรุ่นและแผนผังแผนผังของการสลายของมอเตอร์แบบสองขั้วสองขั้ว (2 แม่เหล็ก) มอเตอร์สามช่อง (3 ขดลวด) บางทีพวกคุณหลายคนมีประสบการณ์ในการถอดมอเตอร์ไฟฟ้า DC และนำแม่เหล็กออกมา
คุณจะเห็นได้ว่าแม่เหล็กถาวรของมอเตอร์ DC แปรงได้รับการแก้ไขและขดลวดของมอเตอร์ DC ที่แปรงสามารถหมุนรอบศูนย์ภายในได้
The fixed side is called the "stator" and the rotating side is called the "rotor".
ต่อไปนี้เป็นภาพร่างโครงสร้างที่แสดงถึงแนวคิดของโครงสร้าง
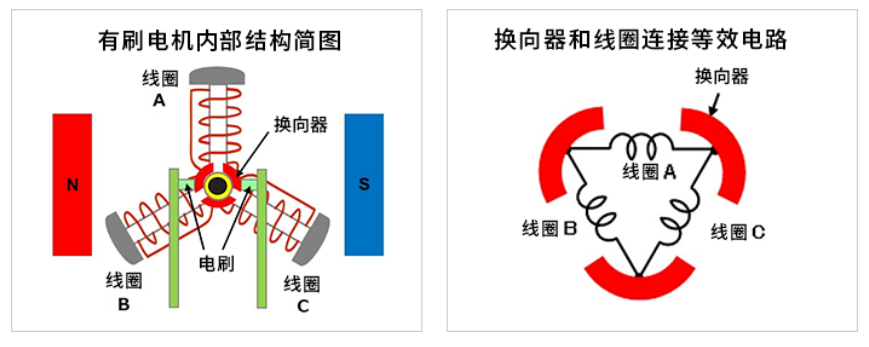
รอบนอกของแกนกลางหมุนมีสาม commutators (แผ่นโลหะงอสำหรับการสลับปัจจุบัน)
เพื่อหลีกเลี่ยงการติดต่อซึ่งกันและกันผู้เดินทางจะได้รับการกำหนดค่า 120 ° (360 °÷ 3 ชิ้น) ผู้เดินทางหมุนไปด้วยการหมุนของเพลา
หนึ่ง commutator เชื่อมต่อกับปลายขดลวดหนึ่งและปลายขดลวดอื่น ๆ และสาม commutators และทั้งสามขดลวดสร้างทั้งหมด (แหวน) เป็นเครือข่ายวงจร
แปรงสองตัวได้รับการแก้ไขที่ 0 °และ 180 °เพื่อติดต่อกับตัวเลือก
แหล่งจ่ายไฟ DC ภายนอกเชื่อมต่อกับแปรงและกระแสกระแสในแปรงเส้นทาง→ Commutator → Coil → Brush
หลักการหมุนของมอเตอร์ DC แปรง
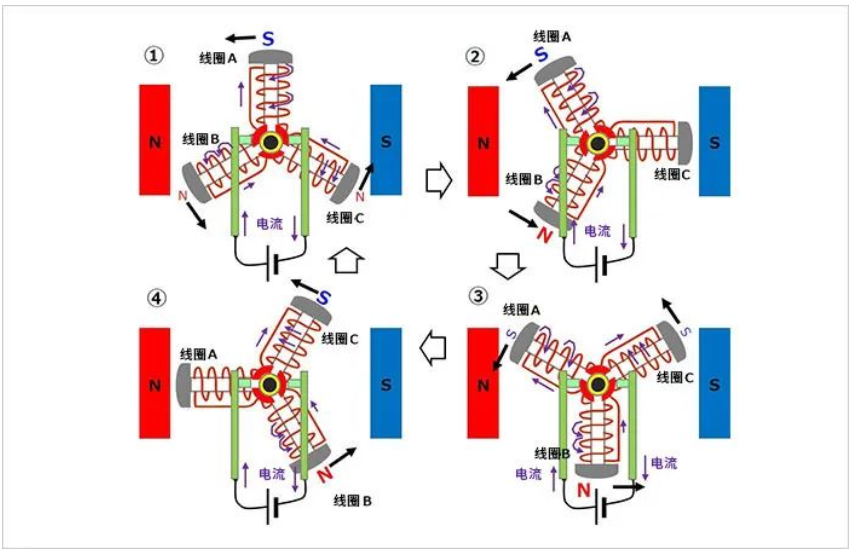
①หมุนทวนเข็มนาฬิกาจากสถานะเริ่มต้น
คอยล์ A อยู่ที่ส่วนบนสุดและเชื่อมต่อเครื่องมือไฟฟ้าที่จ่ายไปยังแปรงตั้งค่าด้านซ้ายเป็น (+) และด้านขวาเป็น (-)
กระแสไฟฟ้าขนาดใหญ่จากแปรงซ้ายผ่านเครื่องผูกไปยังขดลวด A.
นี่คือโครงสร้างที่ส่วนบน (ด้านนอก) ของขดลวด A กลายเป็นเสา S
และตั้งแต่ 1/2 ของกระแสจากขดลวด A ไหลจากแปรงซ้ายไปยังขดลวด B และ C ในทิศทางตรงกันข้ามของขดลวด A ด้านนอกของขดลวด B และ C กลายเป็น N-poles ที่อ่อนแอ (ระบุด้วยตัวอักษรที่เล็กกว่าเล็กน้อยในรูป)
สนามแม่เหล็กที่สร้างขึ้นในขดลวดเหล่านี้และเอฟเฟกต์ที่น่ารังเกียจและน่าดึงดูดของแม่เหล็กทำให้ขดลวดถูกแรงหมุนทวนเข็มนาฬิกา
②การหมุนทวนเข็มนาฬิกาเพิ่มเติม
ถัดไปสมมติว่าแปรงที่ถูกต้องสัมผัสกับทั้งสอง commutators ในสถานะที่ขดลวด A หมุนได้ 30 °ทวนเข็มนาฬิกา
กระแสของขดลวด A ไหลอย่างต่อเนื่องจากแปรงซ้ายผ่านแปรงขวาและด้านนอกของขดลวดยังคงเป็น S-pole
กระแสเดียวกันกับขดลวด A ไหลผ่านขดลวด B และด้านนอกของขดลวด B กลายเป็น N-pole ที่แข็งแกร่งขึ้น
เนื่องจากปลายขดลวด C ถูกตัดด้วยแปรงจึงไม่มีกระแสกระแสไฟฟ้าและไม่มีสนามแม่เหล็กถูกสร้างขึ้น
แม้ในกรณีนี้มีแรงหมุนทวนเข็มนาฬิกา
ขดลวดด้านบนจาก③ถึง④จะถูกแรงเคลื่อนไปทางซ้ายอย่างต่อเนื่องและขดลวดล่างจะถูกแรงเคลื่อนไปทางขวาอย่างต่อเนื่องและยังคงหมุนทวนเข็มนาฬิกาต่อเนื่อง
เมื่อขดลวดหมุนทุก ๆ 30 °ถึง③และ④ด้านนอกของขดลวดจะกลายเป็นขั้ว S เมื่อขดลวดอยู่เหนือแกนแนวนอนกลาง เมื่อขดลวดอยู่ด้านล่างมันจะกลายเป็นขั้ว N และการเคลื่อนไหวจะถูกทำซ้ำ
กล่าวอีกนัยหนึ่งขดลวดด้านบนจะถูกบังคับให้เคลื่อนที่ไปทางซ้ายและขดลวดล่างซ้ำ ๆ จะถูกบังคับให้เคลื่อนที่ไปทางขวาซ้ำ ๆ (ทั้งสองทวนเข็มนาฬิกา) สิ่งนี้ทำให้โรเตอร์หมุนทวนเข็มนาฬิกาตลอดเวลา
หากกำลังเชื่อมต่อกับแปรงซ้ายตรงข้าม (-) และแปรงขวา (+) สนามแม่เหล็กจะถูกสร้างขึ้นในขดลวดสเตเตอร์ขดลวดในทิศทางตรงกันข้ามดังนั้นแรงที่ใช้กับขดลวดจะเคลื่อนที่ไปในทิศทางตรงกันข้ามและหมุนตามเข็มนาฬิกา
นอกจากนี้เมื่อปิดการเชื่อมต่อพลังงานโรเตอร์ของมอเตอร์ที่ถูกแปรงหยุดหมุนเพราะมันถูกกีดกันจากสนามแม่เหล็กที่ทำให้มันหมุน
มอเตอร์ไร้คลื่นเต็มสามเฟส
รูปลักษณ์และโครงสร้างของมอเตอร์ไร้คลื่นแบบเต็มสามเฟส
รูปต่อไปนี้แสดงตัวอย่างของลักษณะที่ปรากฏและโครงสร้างของมอเตอร์ไร้แปรง
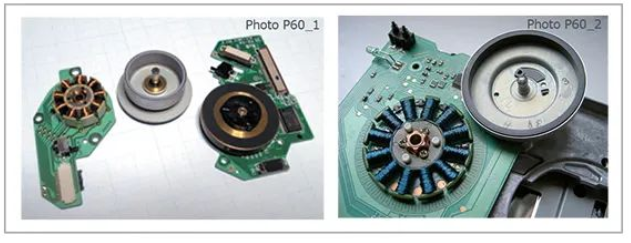
ทางด้านซ้ายเป็นตัวอย่างของมอเตอร์แกนหมุนที่ใช้ในการหมุนแผ่นดิสก์ในอุปกรณ์เล่นดิสก์ มี 9 ขดลวดสามเฟส x 3 ทางด้านขวาเป็นตัวอย่างของมอเตอร์แกนหมุนสำหรับอุปกรณ์ FDD ที่มี 12 ขดลวด (สามเฟส x 4) ขดลวดได้รับการแก้ไขบนกระดานและแผลบนแกนกลาง
ส่วนที่มีรูปดิสก์ที่ด้านขวาของขดลวดคือใบพัดแม่เหล็กถาวร เพลาโรเตอร์จะถูกแทรกเข้าไปในศูนย์กลางของขดลวดและครอบคลุมส่วนขดลวดและแม่เหล็กถาวรล้อมรอบรอบนอกของขดลวด
โครงสร้างภายในของมอเตอร์ไร้คลื่นเต็มสามเฟสและวงจรที่เทียบเท่าของการเชื่อมต่อขดลวด
ถัดไปคือร่างของโครงสร้างภายในและวงจรที่เทียบเท่าของการเชื่อมต่อขดลวด
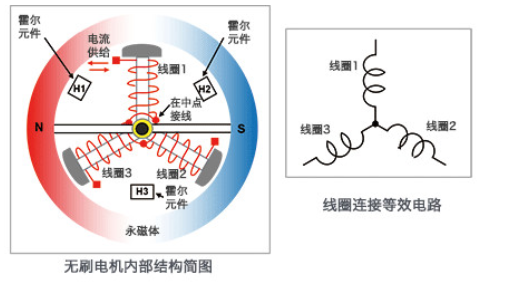
ร่างโครงสร้างภายในนี้เป็นตัวอย่างของมอเตอร์ 2 ขั้ว (2 แม่เหล็ก) 3-Slot (3 ขดลวด) ที่มีโครงสร้างที่ง่ายมาก มันคล้ายกับโครงสร้างของมอเตอร์แปรงที่มีจำนวนเสาและสล็อตเท่ากัน แต่ด้านขดลวดได้รับการแก้ไขและสามารถหมุนแม่เหล็กได้ แน่นอนไม่มีแปรง
ในกรณีนี้ขดลวดจะถูกเชื่อมต่อในรูปตัว y และองค์ประกอบเซมิคอนดักเตอร์ถูกใช้เพื่อจัดหากระแสไฟฟ้าไปยังขดลวดควบคุมการไหลเข้าและการไหลออกของกระแสตามตำแหน่งของแม่เหล็กหมุน
ในตัวอย่างนี้องค์ประกอบฮอลล์ใช้เพื่อตรวจจับตำแหน่งของแม่เหล็ก องค์ประกอบฮอลล์ได้รับการกำหนดค่าระหว่างขดลวดและขดลวดเพื่อตรวจจับแรงดันไฟฟ้าที่สร้างขึ้นและใช้เป็นข้อมูลตำแหน่งตามความแรงของสนามแม่เหล็ก ในภาพของมอเตอร์แกนหมุน FDD ที่ได้รับก่อนหน้านี้คุณสามารถเห็นองค์ประกอบฮอลล์ที่ใช้ในการตรวจจับตำแหน่งระหว่างขดลวดและขดลวด (เหนือขดลวด)
องค์ประกอบของฮอลล์เป็นที่รู้จักกันดีว่าเป็นเซ็นเซอร์แม่เหล็ก
มันสามารถแปลงขนาดของสนามแม่เหล็กเป็นขนาดของแรงดันไฟฟ้าและระบุทิศทางของสนามแม่เหล็กในแง่บวกหรือลบ
ด้านล่างเป็นแผนภาพที่แสดงเอฟเฟกต์ฮอลล์
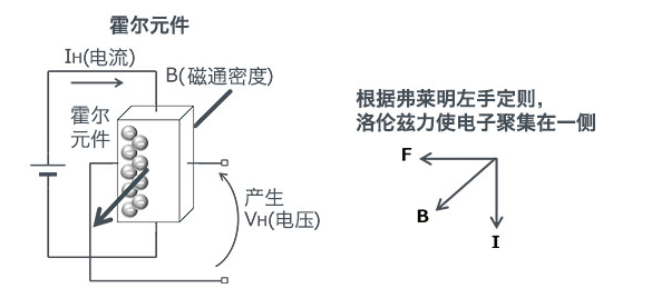
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
แรงดันไฟฟ้าที่เกิดขึ้น VH แสดงโดยสมการต่อไปนี้
VH = (kh / d) ・ Ih ・ b ※ kh: ค่าสัมประสิทธิ์ฮอลล์, d: ความหนาของพื้นผิวการเจาะฟลักซ์
ตามสูตรแสดงให้เห็นว่ากระแสไฟฟ้าสูงขึ้นเท่าใดแรงดันไฟฟ้าก็จะยิ่งสูงขึ้น คุณสมบัตินี้มักจะใช้ในการตรวจจับตำแหน่งของโรเตอร์ (แม่เหล็ก)
หลักการหมุนของมอเตอร์ไร้คลื่นเต็มสามเฟส
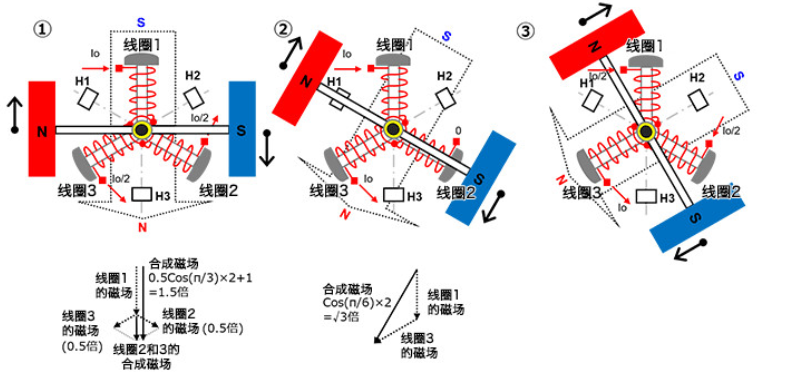
หลักการการหมุนของมอเตอร์ไร้แปรงจะถูกอธิบายในขั้นตอนต่อไปนี้①ถึง⑥ เพื่อความเข้าใจที่ง่ายแม่เหล็กถาวรนั้นง่ายขึ้นจากวงกลมไปยังสี่เหลี่ยมที่นี่
①
ในขดลวด 3 เฟสให้ขดลวด 1 ได้รับการแก้ไขที่ 12 นาฬิกาขดลวด 2 จะได้รับการแก้ไขที่ 4 นาฬิกาและขดลวด 3 ได้รับการแก้ไขที่ 8 นาฬิกาของนาฬิกา ปล่อยให้ N-pole ของแม่เหล็กถาวร 2 ขั้วอยู่ทางด้านซ้ายและ S-pole ทางด้านขวาและหมุนได้
ทำให้กระแส IO ไหลเข้าสู่ขดลวด 1 เพื่อผลิตสนามแม่เหล็ก S-pole ที่ด้านนอกของขดลวด ปล่อยให้กระแส IO/2 ไหลออกมาจากขดลวด 2 และขดลวด 3 เพื่อผลิตสนามแม่เหล็ก N-pole ที่ด้านนอกของขดลวด
เมื่อสนามแม่เหล็กของขดลวด 2 และ 3 ถูกสังเคราะห์เวกเตอร์สนามแม่เหล็ก N-pole จะถูกสร้างขึ้นลงซึ่งเป็น 0.5 เท่าของขนาดของสนามแม่เหล็กที่สร้างขึ้นเมื่อกระแสไฟฟ้าผ่านขดลวด แม่เหล็กถาวรหมุนตามเข็มนาฬิกา
เมื่อกระแสในคอยล์ 2 ลดลงและกระแสในขดลวด 3 จะเพิ่มขึ้นตามตำแหน่งการหมุนสนามแม่เหล็กสังเคราะห์จะหมุนตามเข็มนาฬิกาและแม่เหล็กถาวรยังคงหมุน
②
ในสถานะหมุนของ 30 °กระแส IO ไหลเข้าสู่ขดลวด 1 เพื่อให้กระแสในคอยล์ 2 เป็นศูนย์ทำให้กระแส IO ไหลออกจากขดลวด 3
ด้านนอกของขดลวด 1 กลายเป็นเสา S และด้านนอกของขดลวด 3 กลายเป็นขั้ว N เมื่อเวกเตอร์ถูกสังเคราะห์สนามแม่เหล็กที่เกิดขึ้นคือ√3 (≈1.72) เท่าสนามแม่เหล็กที่เกิดขึ้นเมื่อกระแส IO ผ่านขดลวดเดียว นอกจากนี้ยังสร้างสนามแม่เหล็กสังเคราะห์ที่มุม 90 °เมื่อเทียบกับสนามแม่เหล็กของแม่เหล็กถาวรและหมุนตามเข็มนาฬิกา
เมื่อกระแสการไหลเข้า IO ของขดลวด 1 ลดลงตามตำแหน่งการหมุนกระแสการไหลเข้าของขดลวด 2 จะเพิ่มขึ้นจากศูนย์และกระแสไหลออกของขดลวด 3 จะเพิ่มขึ้นเป็น IO สนามแม่เหล็กสังเคราะห์ก็หมุนตามเข็มนาฬิกาและแม่เหล็กถาวรยังคงหมุน
สมมติว่ากระแสในแต่ละเฟสเป็นไซน์ค่าปัจจุบันที่นี่คือ io × sin (π⁄3) = io × √3⁄2 โดยการสังเคราะห์เวกเตอร์ของสนามแม่เหล็กขนาดสนามแม่เหล็กทั้งหมดคือ (√3⁄2) 2 × 2 = 1.5 เท่าสนามแม่เหล็กที่สร้างขึ้นโดยหนึ่งขดลวด เมื่อกระแสน้ำในแต่ละเฟสเป็นไซนัสขนาดของสนามแม่เหล็กสังเคราะห์เวกเตอร์คือ 1.5 เท่าสนามแม่เหล็กที่ผลิตโดยหนึ่งขดลวดโดยไม่คำนึงถึงตำแหน่งของแม่เหล็กถาวรและสนามแม่เหล็กอยู่ที่มุม 90 °เทียบกับสนามแม่เหล็กของแม่เหล็กถาวร
③
ในสถานะที่การหมุนยังคงดำเนินต่อไปเป็นเวลา 30 °กระแส IO/2 กระแสไหลเข้าสู่ขดลวด 1 กระแส IO/2 กระแสไหลเข้าสู่ขดลวด 2 และกระแส IO ไหลออกมาจากขดลวด 3
ด้านนอกของขดลวด 1 กลายเป็นเสา S ด้านนอกของขดลวด 2 ก็กลายเป็นขั้ว S และด้านนอกของขดลวด 3 กลายเป็นขั้ว N เมื่อเวกเตอร์ถูกสังเคราะห์สนามแม่เหล็กที่เกิดขึ้นคือ 1.5 เท่าของสนามแม่เหล็กที่เกิดขึ้นเมื่อ IO กระแสไหลผ่านขดลวดเดียว (เหมือนกับ①) ที่นี่เช่นกันสนามแม่เหล็กสังเคราะห์ถูกสร้างขึ้นที่มุม 90 °เมื่อเทียบกับสนามแม่เหล็กของแม่เหล็กถาวรและหมุนตามเข็มนาฬิกา
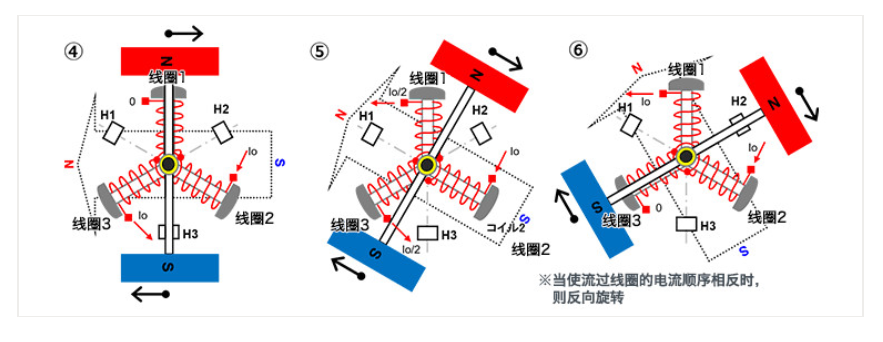
④~⑥
หมุนในลักษณะเดียวกับ①ถึง③
ด้วยวิธีนี้หากกระแสที่ไหลเข้าสู่ขดลวดจะถูกสลับอย่างต่อเนื่องตามลำดับตามตำแหน่งของแม่เหล็กถาวรแม่เหล็กถาวรจะหมุนในทิศทางคงที่ ในทำนองเดียวกันถ้ากระแสกลับด้านและทิศทางของสนามแม่เหล็กสังเคราะห์กลับด้านมันจะหมุนทวนเข็มนาฬิกา
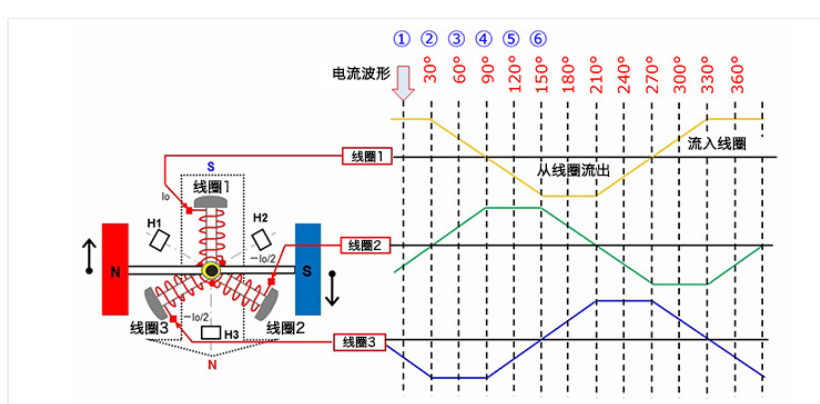
แผนภาพต่อไปนี้แสดงกระแสในแต่ละขดลวดสำหรับแต่ละขั้นตอน①ถึง⑥ข้างต้นอย่างต่อเนื่อง ควรเข้าใจความสัมพันธ์ระหว่างการเปลี่ยนแปลงในปัจจุบันและการหมุนโดยคำอธิบายข้างต้น
สเต็ปเปอร์มอเตอร์
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
โครงสร้างของมอเตอร์สเต็ป (สองเฟสสองขั้ว)
ไดอะแกรมต่อไปนี้จากซ้ายไปขวาแสดงตัวอย่างของการปรากฏตัวของมอเตอร์สเต็ป, ร่างของโครงสร้างภายในและภาพร่างของแนวคิดโครงสร้าง
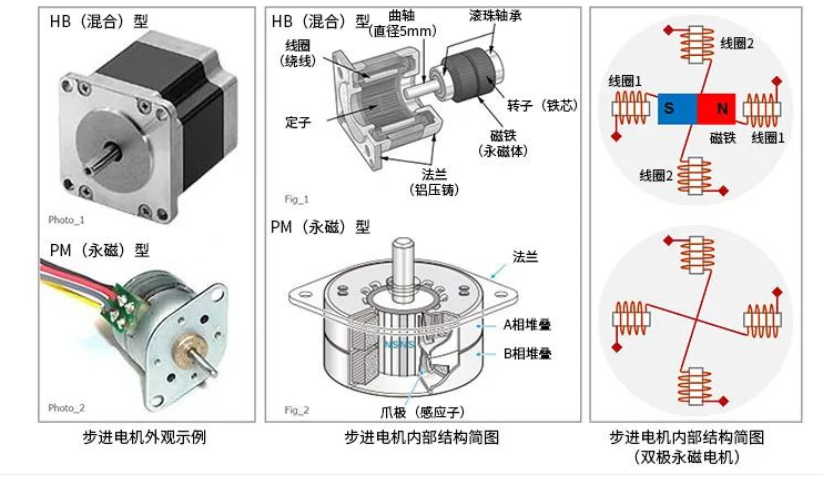
ในตัวอย่างที่ปรากฏจะมีการปรากฏตัวของประเภท HB (ไฮบริด) และมอเตอร์สเต็ปชนิด PM (แม่เหล็กถาวร) แผนภาพโครงสร้างที่อยู่ตรงกลางจะได้รับสำหรับประเภท HB และประเภท PM
มอเตอร์สเต็ปเปอร์เป็นโครงสร้างที่ขดลวดคงที่และแม่เหล็กถาวรหมุน แผนภาพแนวคิดของโครงสร้างภายในของมอเตอร์สเต็ปทางด้านขวาเป็นตัวอย่างของมอเตอร์ PM โดยใช้ขดลวดสองเฟส (สองชุด) ในตัวอย่างโครงสร้างมอเตอร์สเต็ปส์ขั้นพื้นฐานนั้นจะถูกกำหนดค่าไว้ที่ด้านนอกและแม่เหล็กถาวรจะถูกกำหนดค่าไว้ด้านใน นอกเหนือจากขดลวดสองเฟสแล้วยังมีประเภทที่มีจำนวนเฟสจำนวนมากขึ้นเช่นสามเฟสและห้าเฟส
มอเตอร์สเต็ปเปอร์บางตัวมีโครงสร้างที่แตกต่างกันอื่น ๆ แต่โครงสร้างพื้นฐานของมอเตอร์สเต็ปเปอร์ได้รับในบทความนี้เพื่ออำนวยความสะดวกในการแนะนำหลักการปฏิบัติการ ผ่านบทความนี้เราหวังว่าจะเข้าใจโครงสร้างพื้นฐานของมอเตอร์สเต็ปด้วยขดลวดคงที่และแม่เหล็กถาวรหมุน
หลักการทำงานขั้นพื้นฐานของมอเตอร์สเต็ปเปอร์ (การกระตุ้นเฟสเดี่ยว)
แผนภาพต่อไปนี้ใช้เพื่อแนะนำหลักการทำงานพื้นฐานของมอเตอร์สเต็ปเปอร์ นี่คือตัวอย่างของการกระตุ้นสำหรับแต่ละเฟส (ชุดขดลวด) ของขดลวดสองขั้วสองเฟสด้านบน หลักฐานของแผนภาพคือรัฐเปลี่ยนจาก①เป็น④ ขดลวดประกอบด้วยขดลวด 1 และขดลวด 2 ตามลำดับ นอกจากนี้ลูกศรปัจจุบันระบุทิศทางของการไหลของกระแสไฟฟ้า
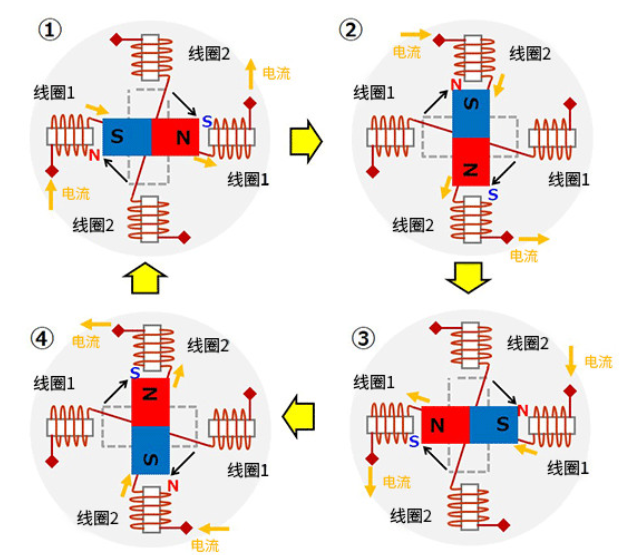
①
・ สร้างกระแสกระแสจากด้านซ้ายของขดลวด 1 และออกจากด้านขวาของขดลวด 1
・ ไม่อนุญาตให้กระแสไหลผ่านขดลวด 2
・ ในเวลานี้ด้านในของขดลวดซ้าย 1 กลายเป็น n และด้านในของขดลวดขวา 1 กลายเป็น S.
・ เป็นผลให้แม่เหล็กถาวรกลางถูกดึงดูดโดยสนามแม่เหล็กของขดลวด 1 และเปลี่ยนไปทางด้านซ้าย S และด้านขวาและหยุด
②
・ กระแสของคอยล์ 1 หยุดลงเพื่อให้กระแสไหลเข้าจากด้านบนของขดลวด 2 และออกจากด้านล่างของขดลวด 2
・ ด้านในของขดลวดบน 2 เปลี่ยนเป็น n และด้านในของขดลวดล่าง 2 เปลี่ยนเป็น S.
・ แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุน 90 °ตามเข็มนาฬิกาเพื่อหยุด
③
・ กระแสของคอยล์ 2 หยุดลงเพื่อให้กระแสไหลเข้าจากด้านขวาของขดลวด 1 และออกจากด้านซ้ายของขดลวด 1
・ ด้านในของขดลวดซ้าย 1 กลายเป็น s และด้านในของขดลวดขวา 1 กลายเป็น N
・ แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุนตามเข็มนาฬิกาอีก 90 °เพื่อหยุด
④
・ หยุดกระแสในขดลวด 1 เพื่อให้กระแสไหลเข้าจากด้านล่างของขดลวด 2 และออกจากด้านบนของขดลวด 2
・ ด้านในของขดลวดบน 2 กลายเป็น s และด้านในของขดลวดล่าง 2 กลายเป็น N
・ แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุนตามเข็มนาฬิกาอีก 90 °เพื่อหยุด
มอเตอร์สเต็ปเปอร์สามารถหมุนได้โดยการสลับกระแสไหลผ่านคอยล์โดยวงจรอิเล็กทรอนิกส์ตามลำดับของ①เป็น④ด้านบน ในตัวอย่างนี้การดำเนินการสลับแต่ละครั้งทำให้มอเตอร์สเต็ปเปอร์หมุน 90 °
นอกจากนี้เมื่อกระแสไฟฟ้าไหลผ่านขดลวดอย่างต่อเนื่องสถานะการหยุดสามารถรักษาได้และมอเตอร์สเต็ปเปอร์สามารถมีแรงบิดถือได้ บังเอิญถ้าคำสั่งของกระแสที่ไหลผ่านขดลวดกลับด้านกลับมามอเตอร์สเต็ปเปอร์สามารถหมุนได้ในสิ่งที่ตรงกันข้าม
ค้นหาผู้ผลิตมอเตอร์อุตสาหกรรมมืออาชีพ - Dongchun Motor China







