 ข้ามไปที่เนื้อหา
ข้ามไปที่เนื้อหา 
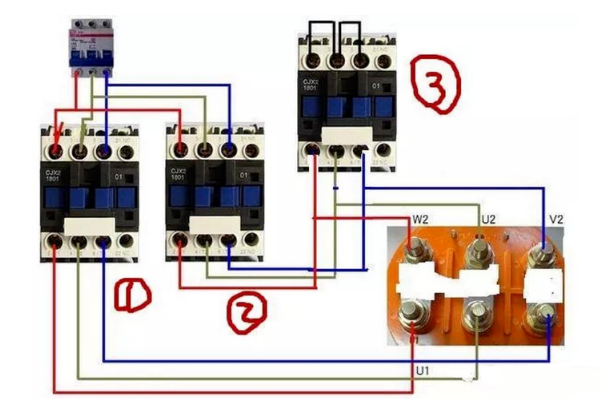
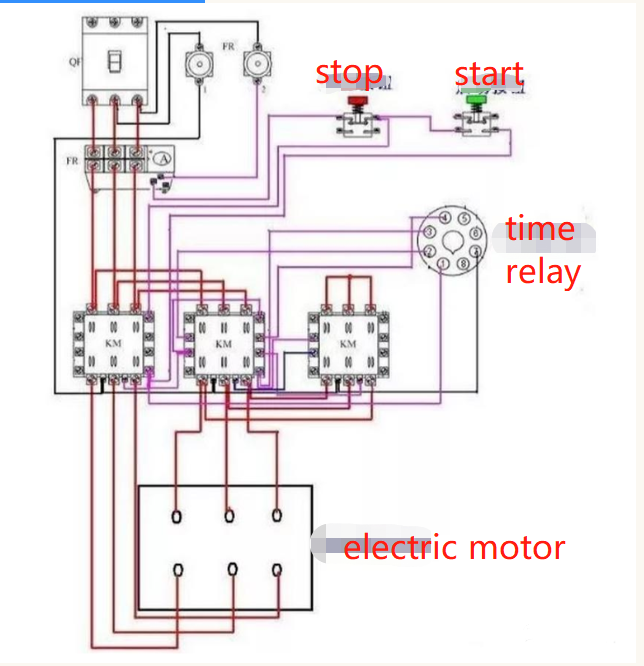
การสตาร์ตแบบสตาร์เดลต้าต้องใช้คอนแทคเตอร์สามตัว คอนแทควงจรหลัก คอนแทคสตาร์ทแบบสตาร์ และคอนแทคเตอร์แบบสามเหลี่ยม
เป็นการดีที่สุดที่จะใช้ไทม์รีเลย์เพื่อควบคุมการหน่วงเวลา และคอนแทควงจรหลักควรอุ่นด้วยโอเวอร์โหลดรีเลย์เพื่อป้องกันมอเตอร์
สเต็ปดาวน์สตาร์ทเตอร์แบบสตาร์เดลต้าเหมาะสำหรับมอเตอร์ไฟฟ้าที่ปกติทำงานในโครงแบบสามเหลี่ยมเท่านั้น

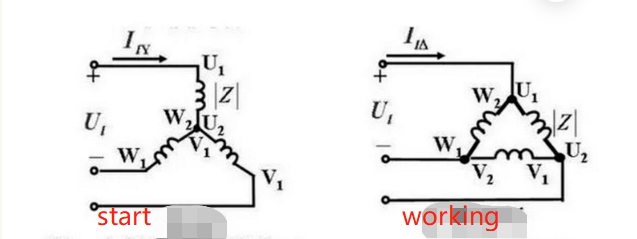
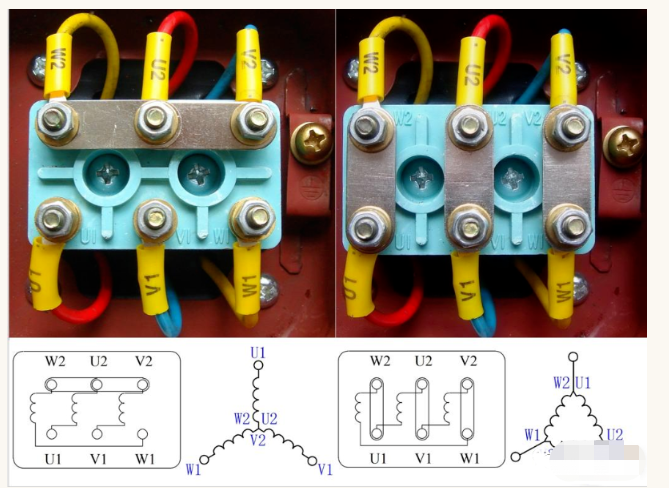
ก่อนอื่นเราจะดูที่ขดลวดภายในของมอเตอร์เหนี่ยวนำ
มีขดลวดมอเตอร์ภายในสามขดลวดในมอเตอร์อะซิงโครนัสสามเฟสที่มีการเชื่อมต่อทั้งรูปดาวและรูปสามเหลี่ยม
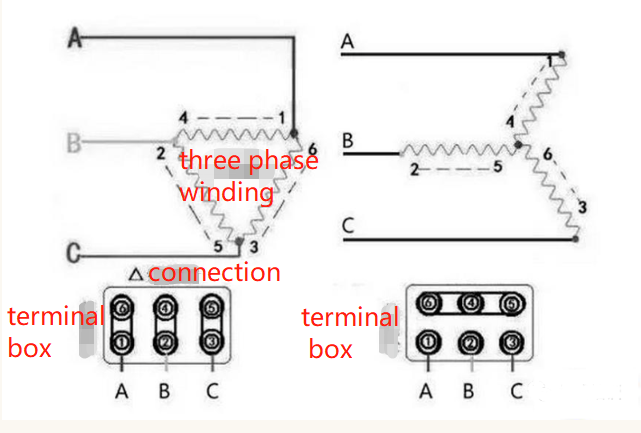
รูปดาวเป็นที่ที่ขดลวดทั้งสามเชื่อมต่อกันที่ส่วนท้าย รูปสามเหลี่ยมเป็นที่ที่ขดลวดทั้งสามเชื่อมต่อกันที่จุดเริ่มต้นและจุดสิ้นสุด
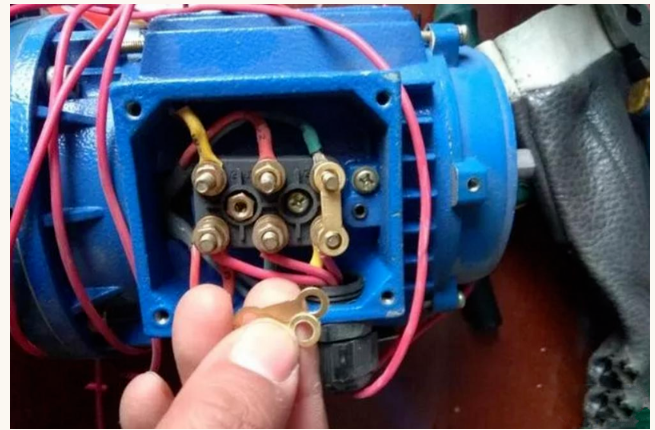
ถอดชิ้นส่วนเชื่อมต่อทั้งสามนี้ออกเมื่อเดินสาย
ให้ความสนใจกับการเดินสายไฟของส่วนไฟหลัก ควรใช้สายสีเหลือง สีเขียว และสีแดง
จากแผนภาพด้านบน เราจะเห็นว่าในตอนแรกคอนแทคเตอร์หมายเลข 1 และคอนแทคเตอร์หมายเลข 3 ถูกดูดเข้าด้วยกันพร้อมๆ กัน เนื่องจากปลายด้านบนของคอนแทคเตอร์ทั้งสามตัวลัดวงจรเข้าด้วยกัน จุดสามจุดเชื่อมต่อกันเป็นจุดเดียว จุดหนึ่งต่อเข้ากับ W2,U2,V2 ของมอเตอร์ ซึ่งเกิดเป็นการเชื่อมต่อแบบดาว จุดนี้เรียกว่า จุดที่เป็นกลาง
การสตาร์ทด้วยสตาร์ช่วยลดแรงดันและกระแส มอเตอร์เหนี่ยวนำจึงสตาร์ทได้ง่าย
เมื่อเริ่มต้นแล้ว คอนแทคเตอร์ 3 จะถูกตัดการเชื่อมต่อ คอนแทคเตอร์ 2 จะถูกเปิดใช้งาน และคอนแทคเตอร์ 1 จะเป็นคอนแทคเตอร์หลัก ซึ่งยังคงเปิดใช้งานอยู่
หลังจากเปิดใช้งานคอนแทคเตอร์หมายเลข 1 และหมายเลข 2 แล้ว ขดลวดทั้งสามของมอเตอร์ที่เชื่อมต่อจะกลายเป็นการเชื่อมต่อแบบสามเหลี่ยม และมอเตอร์เหนี่ยวนำสามารถทำงานได้ตามปกติที่แรงดันไฟฟ้าเต็ม
ที่นี่เราเห็นการเดินสายที่สมบูรณ์
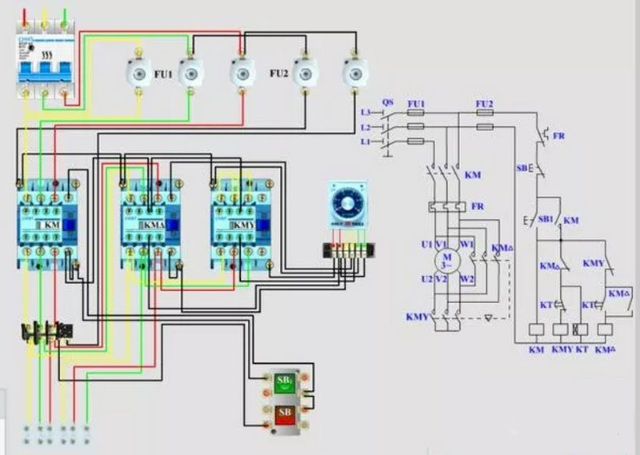
นี่คือการเดินสายที่สมบูรณ์
รีเลย์โอเวอร์โหลดความร้อนเชื่อมต่อกับคอนแทคเตอร์หลักที่มีลำดับเฟสเดียวกันในทั้งสามเฟส
แผนภาพสีเหลือง สีเขียว และสีแดงด้านบนแสดงส่วนของสายหลัก และเส้นสีดำคือส่วนของสายควบคุมรอง
มอเตอร์ไฟฟ้าที่สตาร์ทแบบสตาร์เดลต้ามีลักษณะสำคัญสองประการ:
กระแสสตาร์ทสตาร์และแรงบิดสตาร์ทกลายเป็นหนึ่งในสามของกระแสพิกัด
รีเลย์โอเวอร์โหลดความร้อนเชื่อมต่อกับคอนแทคเตอร์หลักที่มีลำดับเฟสเดียวกันในทั้งสามเฟส
แผนภาพด้านบนแสดงส่วนของสายหลักสีเหลือง เขียว แดง และเส้นสีดำคือส่วนของสายควบคุมสายรอง
มอเตอร์ที่มีการสตาร์ทแบบสตาร์เดลต้ามีลักษณะสำคัญสองประการ: กระแสสตาร์ทแบบสตาร์และแรงบิดสตาร์ททั้งคู่กลายเป็นหนึ่งในสามของกระแสพิกัด
จะเห็นได้ว่ากระแสตอนสตาร์ทนั้นน้อยมาก
การสตาร์ทแบบสตาร์เดลต้าจึงเหมาะสำหรับการใช้งานที่ไม่ต้องการแรงบิดสตาร์ทของมอเตอร์อย่างเคร่งครัด แต่กระแสสตาร์ทควรถูกจำกัด
ถ้าโหลดหนักเกินไปตอนสตาร์ท อาจไม่สามารถแบกมอเตอร์ได้เนื่องจากแรงบิดสตาร์ทลดลงถึงหนึ่งในสามของแรงบิดพิกัด ดังนั้นโดยทั่วไปจะใช้สตาร์เดลต้าสตาร์ทเมื่อโหลดเบาเมื่อสตาร์ท- ขึ้นและหนักขึ้นเมื่อวิ่งขึ้น หากกระแสสตาร์ทมอเตอร์สูงเกินไป จะทำให้เกิดความผันผวนของแรงดันไฟฟ้าในกริด ในกรณีนี้ให้ใช้การสตาร์ทแบบสตาร์เดลต้าด้วย
สังเกตการเดินสายของไทม์รีเลย์ในไดอะแกรมต่อไปนี้
ดังนั้นสตาร์ทเตอร์แบบสตาร์เดลต้าจึงเหมาะสำหรับสภาวะที่ไม่ต้องการแรงบิดเริ่มต้นของมอเตอร์อย่างเคร่งครัด แต่ควรจำกัดกระแสสตาร์ท
ดังนั้นจึงไม่สามารถสรุปขนาดของกำลังมอเตอร์เพื่อพิจารณาว่าจะใช้การสตาร์ทแบบสตาร์-เดลต้าหรือไม่ หากโหลดหนักเกินไปขณะสตาร์ท อาจไม่สามารถบรรทุกมอเตอร์ได้เนื่องจากแรงบิดเริ่มต้นลดลงถึงหนึ่งในสามของแรงบิดที่กำหนด และโดยทั่วไปแล้วการสตาร์ทแบบสตาร์เดลต้าจะใช้เมื่อโหลดเบาเมื่อสตาร์ทและหนักเมื่อทำงาน . หากกระแสสตาร์ทมอเตอร์สูงเกินไป จะทำให้เกิดความผันผวนของแรงดันกริด ในกรณีนี้ให้ใช้การสตาร์ทแบบสตาร์เดลต้าด้วย

ให้ความสนใจกับการเดินสายไฟของรีเลย์เวลาซึ่งอธิบายได้ง่ายมาก
เพื่อชี้แจงประเด็นเหล่านี้ ก่อนอื่นเราต้องทบทวนทฤษฎีไฟฟ้าพื้นฐานบางอย่าง
ดูแผนภาพด้านล่างและเริ่มต้นด้วยการทำความเข้าใจความสัมพันธ์ระหว่างแรงดันไฟฟ้าเฟสและแรงดันไฟฟ้าของสาย กระแสเฟสและกระแสเฟสสำหรับวงจรโหลดสามเฟสในวิธีการเชื่อมต่อที่แตกต่างกัน
เราทราบจากแผนภาพว่าหากเรานำระบบจ่ายไฟแรงดันต่ำ (TN) สามเฟสสี่สายในปัจจุบัน (ที่เรียกว่ายูทิลิตี้) มาใช้เป็นจำนวนมากในประเทศจีน เมื่อโหลดยังคงไม่เปลี่ยนแปลง แรงดันเฟสที่เพิ่มเข้ามา ไปที่ปลายทั้งสองของโหลดเมื่อการเชื่อมต่อแบบดาวเป็นหนึ่งในสามของรูทของแรงดันไฟฟ้า และแรงดันเฟสเพิ่มที่ปลายทั้งสองของโหลดเมื่อการเชื่อมต่อมุมเท่ากับแรงดันสาย
สำหรับโหลดเดียวกัน กระแสเฟสที่ไหลผ่านโหลดจะเท่ากับกระแสไฟเส้นเมื่อเชื่อมต่อในโหมดสตาร์ ในขณะที่กระแสเฟสที่ไหลผ่านโหลดคือหนึ่งในสามของรากของกระแสไฟเส้นเมื่อเชื่อมต่อในโหมดมุม (เป็น โปรดเข้าใจความแตกต่างระหว่างนิพจน์นี้กับนิพจน์ในแผนภาพด้านล่าง อย่าสับสนเพราะทั้งสองมีความหมายเหมือนกัน มีเพียงนิพจน์เท่านั้นที่แตกต่างกัน)
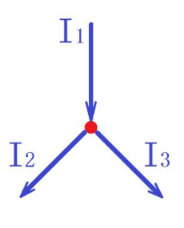
ต่อไป มาทบทวนกฎปัจจุบันที่สำคัญของ Kirchhoff ดูแผนภาพด้านล่าง จากแผนภาพ เรารู้ว่ากระแสที่ไหลผ่านโหนดใด ๆ มีค่าคงที่เท่ากับกระแสที่ไหลออกจากโหนดนั้นเสมอ [อาจกล่าวได้ว่าผลรวมพีชคณิตของกระแสในแต่ละวงจรย่อย (AC คือผลรวมเวกเตอร์) เท่ากัน เป็นศูนย์] นั่นคือกระแสไม่สะสมในโหนด
ลองดูที่การเชื่อมต่อแบบดาวและมุมทั่วไปของขดลวดภายในของมอเตอร์แบบอะซิงโครนัสกรงกระรอกสามเฟส ดูแผนภาพด้านล่าง
นี่คือการเชื่อมต่อมาตรฐาน ซึ่งเป็นหนึ่งในความรู้พื้นฐานที่ช่างไฟฟ้าที่มีคุณสมบัติเหมาะสมจะต้องเชี่ยวชาญ หลังจากเข้าใจหลักการแล้ว เราสามารถปรับใช้และบำรุงรักษาอุปกรณ์ของเราได้อย่างยืดหยุ่นในแนวทางการผลิตในอนาคต เพื่อให้อุปกรณ์สามารถรองรับการผลิตได้ดียิ่งขึ้น
ขั้นตอนต่อไปคือการเริ่มวิเคราะห์วงจรสตาร์ตดาวน์แบบสเต็ปดาวน์/เดลต้า ดูไดอะแกรมด้านล่าง
วงจรควบคุมหลักอันแรกทางซ้ายในแผนภาพคือวงจรควบคุมหลักสตาร์/เดลต้าบัคสตาร์ทมาตรฐาน ซึ่งเป็นวงจรเอนกประสงค์
วงจรควบคุมเสริมวงจรแรกทางด้านซ้ายและด้านล่างคือวงจรควบคุมเสริมมาตรฐานทั่วไปแบบดั้งเดิม วงจรที่สองและสามเป็นหนึ่งในวงจรควบคุมเสริมที่หมุนเวียนอยู่ในสังคม ประการที่สี่คือวงจรควบคุมเสริมหลังจากที่ฉันได้กำหนดมาตรฐานวงจรแล้ว และที่ห้าคือวงจรควบคุมเสริมหลังจากที่ฉันได้มาตรฐานแล้ว
หมายเหตุ: ที่เรียกว่ามาตรฐานคือการวาดขึ้นใหม่ตามข้อกำหนดมาตรฐานที่เกี่ยวข้อง ไม่ครบถ้วนและละเอียดถี่ถ้วนตามข้อกำหนดมาตรฐาน เพื่อให้ภาระงานมากเกินไป และสำหรับการอภิปรายจะไม่จำเป็น ตราบเท่าที่ทุกคน สามารถเข้าใจได้โปรดเข้าใจ
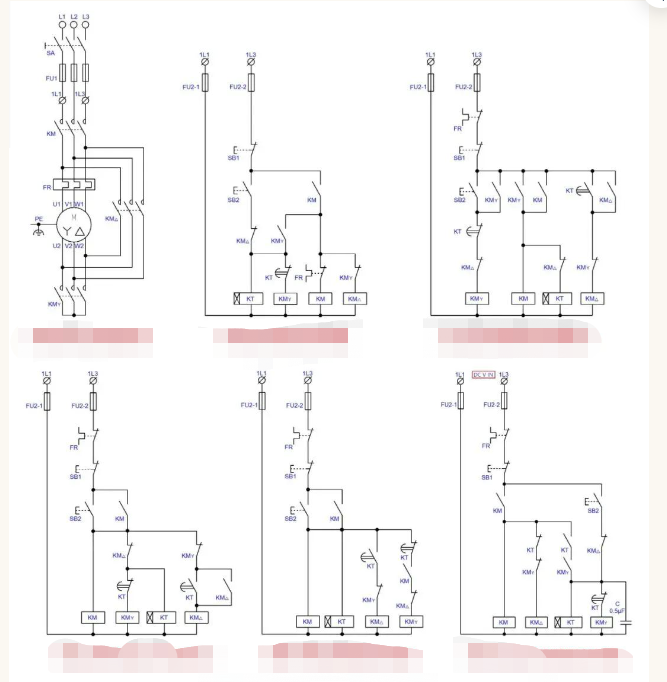
ก่อนอื่น มาดูวงจรควบคุมหลักสเต็ปดาวน์แบบสตาร์/เดลต้ามาตรฐาน ซึ่งประกอบขึ้นเป็นสตาร์สเต็ปดาวน์สตาร์ทเมื่อปิด KMY จากการอภิปรายทางทฤษฎีเกี่ยวกับความสัมพันธ์ระหว่างแรงดันเฟส แรงดันไฟฟ้าในสาย กระแสเฟส กระแสในเส้น และกฎกระแสกระแสหลักที่เริ่มต้นก่อนหน้านี้ เรารู้ว่าจุดดาวที่เกิดจาก KMY (ซึ่งสามารถเรียกว่าจุดศูนย์หรือจุดเป็นกลาง) ) จะมีกระแสไหลผ่านหน้าสัมผัสหลักของ KMY ไปยังจุดรูปดาวที่เกิดจากเส้นลวด และกระแสที่ไหลเข้าสู่จุดรูปดาวเท่ากับกระแสในเส้น
เนื่องจากโหลดในการเชื่อมต่อรูปสามเหลี่ยม (ในกรณีนี้คือขดลวดสามเฟสของมอเตอร์) แรงดันไฟฟ้าที่ใช้กับปลายของแต่ละเฟสของโหลดคือแรงดันไฟฟ้าของสาย (เช่น 380V) เช่น แรงดันเฟสเท่ากับ แรงดันไฟฟ้า.
เมื่อเราเปลี่ยนเป็นการเชื่อมต่อแบบดาว (โหลดและแรงดันอินพุตยังคงไม่เปลี่ยนแปลง) แรงดันที่ปลายทั้งสองของแต่ละเฟสของโหลดคือหนึ่งในสามของรากของแรงดันเดิม (เช่น 220V) จากนั้นกระแสที่ไหลผ่านแต่ละเฟส ของโหลดเพียง 1/3 ของกระแสเดิม (การเชื่อมต่อเชิงมุม) ซึ่งเป็นหลักการของการลดแรงดันเริ่มต้น
เนื่องจากกระแสเฟสของการเชื่อมต่อแบบดาวเท่ากับกระแสสาย หมายความว่ากระแสที่ไหลผ่านหน้าสัมผัสหลักของ KM (คอนแทคหลัก) จะเหมือนกับกระแสที่ไหลผ่านหน้าสัมผัสหลักของ KMY (คอนแทคของดาวปิด ). ดังนั้นไม่ว่าจะปิดหรือหักแบบซิงโครนัส ส่วนโค้งที่สร้างโดยคอนแทคหลักสองคอนแทคจะเหมือนกัน ไม่มีการปิดแบบซิงโครนัสของทั้งสองเมื่อส่วนโค้งจะใหญ่กว่าส่วนโค้งที่สร้างขึ้นเมื่อไม่ได้ปิดอาร์กิวเมนต์แบบซิงโครนัส
ดังนั้น ตราบใดที่ตัวเลือกที่ถูกต้อง (การเลือก) และการใช้คอนแทคที่มีคุณสมบัติเหมาะสม ภายใต้สถานการณ์ปกติจะไม่ปรากฏขึ้นเมื่อการกระทำของคอนแทคเนื่องจากการอาร์คที่เกิดจากการสัมผัสอย่างรุนแรง การระเหยหรือการยึดเกาะของความเป็นไปได้
อย่างไรก็ตาม ในทางปฏิบัติการผลิต การออกแบบตามปกติคือ KMY จะปิดก่อน KM จุดประสงค์คือเพื่อยืดอายุการใช้งานของหน้าสัมผัส KMY และลดต้นทุนการดำเนินงาน หลักการคือ KM ถูกเลือกตามกระแสการทำงานเชิงมุม ในขณะที่ KMY ถูกเลือกตามกระแสการเชื่อมต่อดาว หาก KMY ปิดก่อน KM จะไม่มีการสตาร์ทเกิดขึ้น (จะยังมีอยู่เมื่อสวิตช์สตาร์/มุมเสีย) ดังนั้น KM ที่มีสเปคสูงกว่า KMY จะรองรับการอาร์คเมื่อเริ่มต้น ซึ่งดีกว่า KMY ที่มีสเปคต่ำกว่ามาก
ถ้าการออกแบบ KMY ในสวิตซ์ดาว/มุม ให้ปลด KM ออกก่อน แล้วจึงปลด KMY จะดีที่สุด (เพราะส่วนโค้งเมื่อแตกจะมากกว่าเมื่อปิดส่วนโค้งที่ใหญ่กว่ามาก) แต่สิ่งนี้จะทำให้โครงสร้างวงจรควบคุมเสริมซับซ้อนและต้นทุนทางเศรษฐกิจเพิ่มขึ้น บางครั้งก็มากขึ้น คุ้มกว่าที่เสียไป
ดูคอนแทคเชื่อมต่อเชิงมุม KM△ อีกครั้ง เนื่องจากการเชื่อมต่อมุมเมื่อกระแสไหลผ่านหน้าสัมผัสหลัก KM△ คือกระแสเฟส เท่ากับรากของกระแสสาย 3 ส่วน โดยทั่วไปแล้ว เพื่อความปลอดภัยและเชื่อถือได้ ถูกเลือกตามกระแสสาย
เนื่องจากส่วนโค้งอาจมีขนาดใหญ่ขึ้นในระหว่างกระบวนการแปลงและอาจทำให้หน้าสัมผัสคอนแทคไหม้ได้ง่าย แน่นอน ถ้า KM△ ถูกปิดก่อน KM จะสามารถเลือก KM△ ได้ตามเฟสปัจจุบัน (หนึ่งในสามของหมายเลขรูทของบรรทัดปัจจุบัน)
แต่สิ่งนี้จะทำให้โครงสร้างวงจรควบคุมซับซ้อน ต้นทุนการผลิตอุปกรณ์ไม่เพียงลดลง แต่ยังไม่ดีพอที่จะขาดทุนมากกว่ากำไรอีกด้วย
การวิเคราะห์วงจรหลักของสตาร์/เดลต้าบั๊กเริ่มต้นโดยสรุป: ตราบใดที่การเลือกประเภทของข้อมูลจำเพาะของคอนแทคเตอร์และผลิตภัณฑ์ที่ผ่านการรับรองถูกต้อง ภายใต้สถานการณ์ปกติ การลบคอนแทคคอนแทคเตอร์ไม่ควรเป็นปัญหา การกระทำแบบซิงโครนัสของ KM และ KMY จะ ทำให้เกิดการโค้งเป็นความเข้าใจผิด
ในความเป็นจริง มีเหตุผลหลายประการที่ทำให้เกิดประกายไฟ แต่สาเหตุหลักคือเวลาแปลงดาว/มุมไม่ได้รับการตั้งค่าอย่างเหมาะสม หรือโหลดหนักเกินไป
เวลาเริ่มต้นไม่เพียงพอที่จะแปลงเร็วเกินไป บางส่วนคือคุณภาพของมอเตอร์เองหรือการบำรุงรักษาตามปกติไม่เพียงพอกระแสไฟที่ใช้งานจะมีขนาดใหญ่ บางส่วนคือมอเตอร์ทำงานด้วยโรคหรือการออกแบบที่ไม่สมเหตุผลซึ่งส่งผลให้เกิดการทำงานเกินพิกัดในระยะยาวของมอเตอร์ซึ่งแน่นอนว่าไม่รวมถึงการออกแบบหรือประเภท ข้อกำหนด และคุณภาพของคอนแทคเตอร์ที่ใช้ในกระบวนการบำรุงรักษาที่ไม่เป็นไปตามข้อกำหนด .
นอกจากนี้ โปรดทราบว่าการเริ่มการลดแรงดันไฟฟ้าแบบสตาร์/เดลต้ามีช่วงการใช้งานที่แน่นอน และไม่จำเป็นต้องดีกว่าวิธีการเริ่มต้นการลดแรงดันไฟฟ้าแบบอื่นๆ เนื่องจากกระแสเริ่มต้นของการลดแรงดันสตาร์/เดลต้าคือ 1/3 ของกระแสเริ่มต้นแรงดันเต็ม แรงบิดเริ่มต้นจึงเป็นเพียง 1/3 ของแรงบิดเริ่มต้นดั้งเดิม ซึ่งใช้ได้กับอุปกรณ์สตาร์ทเบาหรือไม่มีโหลดเท่านั้น (อุปกรณ์ดังกล่าว เนื่องจากปั๊มหรือเครื่องอัดอากาศต้องปิดวาล์วทางเข้า/ออกหรือเทถังอากาศอัดออกก่อนที่จะสตาร์ทมอเตอร์สตาร์ตแบบลดแรงดันไฟแบบสตาร์/เดลต้า)
สำหรับอุปกรณ์สตาร์ทที่มีภาระหนัก เวลาสตาร์ทมากกว่า 30 วินาที (โดยเฉพาะมากกว่า 1 นาที) มีผลกระทบอย่างมากต่อมอเตอร์และสายจ่าย (โดยเฉพาะหากหม้อแปลงจ่ายไฟต่ำกว่ากำลังผลิต)
ดังนั้น ยิ่งมอเตอร์มีโหลดมาก (หรือกำลังสูง) วิธีการสตาร์ทอื่นๆ [เช่น การสตาร์ทบั๊กแบบถ่ายโอนอัตโนมัติ, การสตาร์ทบั๊กรูปสามเหลี่ยมด้านขยาย, เครื่องปฏิกรณ์ซีรีส์สเตเตอร์ (หรือความต้านทาน) การสตาร์ทบั๊ก, การสตาร์ทบั๊กของซอฟต์สตาร์ท, การเริ่มอินเวอร์เตอร์ตัวแปลงความถี่ ฯลฯ] ควรใช้เพื่อเลือกวิธีการเริ่มต้นตามสถานการณ์จริงที่เฉพาะเจาะจง
ดังนั้นจึงเป็นความเข้าใจผิดที่จะคิดว่าการเริ่มต้นบัคแบบสตาร์/เดลต้านั้นดีกว่าวิธีการสตาร์ทแบบบัคแบบอื่นๆ
นอกจากนี้ยังเป็นความผิดพลาดที่จะคิดว่าไม่ว่าจะใช้อุปกรณ์ใด ตราบใดที่ยังใช้การสตาร์ทบัคอยู่ ก็จะใช้วิธีการสตาร์ทแบบสตาร์/เดลต้าบัคทั้งหมด (ข้อดีของสตาร์/เดลต้าบัคสตาร์ทคือโครงสร้างที่เรียบง่ายและขนาดที่เล็ก)
ต่อไปนี้เป็นการอภิปรายเกี่ยวกับวงจรควบคุมเสริมสำหรับการสตาร์ทสตาร์/เดลต้าบัค
วงจรควบคุมเสริมเรียกว่าวงจรควบคุมเป็นวงจรที่ควบคุมวัตถุที่ถูกควบคุมตามข้อกำหนดของกระบวนการ จากห้าวิธีการควบคุมที่แสดงไว้ข้างต้น วิธีการควบคุมจะเหมือนกันมาก ยกเว้นวิธีที่สี่ ซึ่งแตกต่างกันเฉพาะในการสร้างวงจรเท่านั้น วิธีที่สี่จะตรงกันข้ามกับสามวิธีแรก และวิธีสุดท้ายคือการเพิ่มฟังก์ชันหน่วงเวลาคอนแทคเตอร์เปลี่ยนเชิงมุม ไปยังวงจรควบคุมสามวงจรแรก
วงจรควบคุมแรกคือวงจรควบคุมมาตรฐานแบบดั้งเดิมซึ่งเป็นวงจรปิดผนึกดวงแรก (KMY) ก่อนที่คอนแทคหลัก (KM) จะปิดเพื่อจ่ายวงจรหลักด้วยการสตาร์ทแบบบั๊ก และหลังจากการสตาร์ทเสร็จสิ้นให้เปลี่ยนเป็นการทำงานเชิงมุมและ ไทม์รีเลย์ออกจากการทำงาน
วงจรนี้มีโครงสร้างวงจรที่เรียบง่าย แต่ตรงตามลักษณะของการทำงานที่ปลอดภัยและเชื่อถือได้
วงจรควบคุมที่สองและสามคล้ายกับวงจรควบคุมแรกตรงที่วงจรทั้งสองจะปิดผนึกสตาร์ก่อนที่จะจ่ายสตาร์ทแบบขั้นบันได และรีเลย์เวลาจะดับหลังจากสตาร์ทเสร็จ
ความแตกต่างคือโครงสร้างวงจรซับซ้อนกว่าเล็กน้อย เพิ่มหน้าสัมผัสแบบโซ่คู่ มีความปลอดภัยและความน่าเชื่อถือมากกว่าวงจรควบคุมแบบแรก
โดยเฉพาะอย่างยิ่ง วงจรควบคุมที่สอง หน้าสัมผัสใช้มากที่สุด แม้ว่าความปลอดภัยและความน่าเชื่อถือจะเพิ่มขึ้นมาก แต่ก็ยากต่อการบำรุงรักษาเช่นกัน
ประการที่สี่คือวงจรที่ออกแบบ สำหรับวงจรนี้โดยส่วนตัวผมว่ายังไม่ค่อยสมเหตุผลและลงตัวเท่าไรนัก
แม้ว่าจะเพิ่มฟังก์ชันโซ่คู่ แต่คอนแทคเตอร์หลัก KM จะปิดก่อนคอนแทคเตอร์แบบดาวซีล KMY และคอนแทคเตอร์แบบดาวซีล KMY มักจะทำงานภายใต้การอาร์ค ซึ่งดีกว่าการซีลสตาร์ก่อนแล้วจึงสตาร์ทบั๊ก
แม้ว่าจะไม่เป็นอันตราย แต่เมื่อเทียบกับซีลสตาร์ตัวแรก หลังจากซีลสตาร์แล้ว หน้าสัมผัส KMY ของคอนแทคจะสั้นกว่าซีลสตาร์ตัวแรกเสมอ (มากกว่าสองเท่าของการทำงานกับแสงอาร์ค)
การมีส่วนร่วมระยะยาวของไทม์รีเลย์ KT ในการทำงานเป็นส่วนที่ยากของวงจรนี้
ดังที่เราทราบ อายุการใช้งานของส่วนประกอบที่ได้รับพลังงานอย่างต่อเนื่องและเกี่ยวข้องกับการทำงานจะสั้นกว่าที่ไม่ได้ใช้งานมาก และการใช้พลังงานจะเพิ่มขึ้น
As the saying goes, "more incense burners, more ghosts", your time relay KT is involved in long-term operation, so it may give you a failure in operation at some point, affecting the efficiency of the equipment and increasing operating and maintenance costs.
ประการที่ห้าคือวงจรที่ให้มา
แม้ว่าในการดำเนินการของการดำเนินการและสามรายการก่อนหน้านี้จะคล้ายกัน แต่ดาวดวงแรกที่ถูกปิดผนึกหลังจากรีเลย์กำลังและเวลาไม่เกี่ยวข้องกับการทำงานของฟังก์ชัน แต่การใช้ตัวเก็บประจุแบบขนาน C เพื่อขยายการปิดคอนแทคเตอร์มุม KM△ คือ งูนิดหน่อย - ซ้ำซ้อน
และฟังก์ชันหน่วงเวลาเฉพาะในวงจรควบคุมการจ่ายไฟกระแสตรงเท่านั้นที่จะมีบทบาทในวงจรไฟฟ้ากระแสสลับ แต่ไม่มีบทบาท หรือแม้แต่สิ่งที่ซ้ำซ้อนและยุ่งยาก
คุณไม่รู้ว่าเมื่อใดควรแจ้งเหตุขัดข้องหรือรั่วไหลจากความผิดพลาด
โปรดทราบว่าแรงดันรีเวิร์สพีคของตัวเหนี่ยวนำในวงจรไฟฟ้ากระแสตรงนั้นมากกว่าแรงดันไฟฟ้าที่กำหนดสี่ถึงห้าเท่า
แค่นั้นแหละสำหรับการวิเคราะห์วงจรสตาร์ทแบบสตาร์/เดลต้าบัค
ยินดีที่จะฝากข้อความไว้ในพื้นที่แสดงความคิดเห็นสำหรับข้อมูลใด ๆ
หากมีข้อสงสัยเกี่ยวกับมอเตอร์ไฟฟ้า โปรดติดต่อช่างไฟฟ้ามืออาชีพ ผู้ผลิต ใน จีน ดังนี้

Dongchun motor มีมอเตอร์ไฟฟ้าหลากหลายประเภทที่ใช้ในอุตสาหกรรมต่างๆ เช่น การขนส่ง โครงสร้างพื้นฐาน และการก่อสร้าง
รับคำตอบที่รวดเร็ว






