 ข้ามไปที่เนื้อหา
ข้ามไปที่เนื้อหา มอเตอร์ไร้แปรงถ่านกับมอเตอร์ไร้แปรงถ่านแตกต่างกันอย่างไร?
อะไรคือความแตกต่างระหว่างมอเตอร์ซิงโครนัสและมอเตอร์อะซิงโครนัส?
มอเตอร์เหนี่ยวนำของโรเตอร์โรเตอร์เป็นอย่างไร
เซอร์โวมอเตอร์ทั้งหมดเป็นมอเตอร์ AC หรือไม่
เซอร์โวมอเตอร์ทั้งหมดเป็นมอเตอร์ซิงโครนัสหรือไม่
สเต็ปเปอร์มอเตอร์เป็นของมอเตอร์กระแสตรงหรือมอเตอร์ไฟฟ้ากระแสสลับหรือไม่
Is a servo motor a servo motor? ......
นักปราชญ์เคยกล่าวไว้ว่า: ถ้าความรู้ไม่เป็นระบบ ความรู้กับย่อหน้าต่างกันอย่างไร?
แต่หนังสือปราชญ์เกี่ยวกับข้อความที่ยืดยาว คำศัพท์เพ้อฝัน คำอธิบายที่มีเหตุผลนั้น มองดูผู้คนในก้อนเมฆจริงๆ
ฉันได้ค้นหาทางอินเทอร์เน็ตเป็นเวลานาน ไม่พบคำอธิบายที่เป็นระบบกว่านี้เกี่ยวกับโครงสร้างมอเตอร์ไฟฟ้าและหลักการจำแนกประเภท ดังนั้นพวกเขาจึงใช้ความพยายามอย่างมากในการสืบค้นและจัดระเบียบสำเนา
บทความนี้พยายามอธิบายความรู้ที่เป็นระบบด้วยภาษาธรรมดา และใช้ภาพเคลื่อนไหวและรูปภาพจำนวนมากเพื่อแสดงความรู้ที่คลุมเครืออย่างชัดเจน
เนื่องจากความรู้ที่จำกัดของฉัน ข้อผิดพลาดจำนวนมากจึงหลีกเลี่ยงไม่ได้ โปรดแก้ไข ผู้เชี่ยวชาญโปรดอย่าลังเลที่จะให้คำแนะนำ
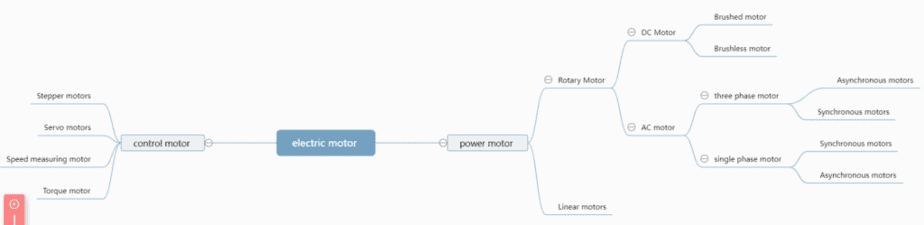
1. แผนผังอธิบายประเภทพื้นฐานของมอเตอร์ไฟฟ้า
2. DC electric motor - brush motor
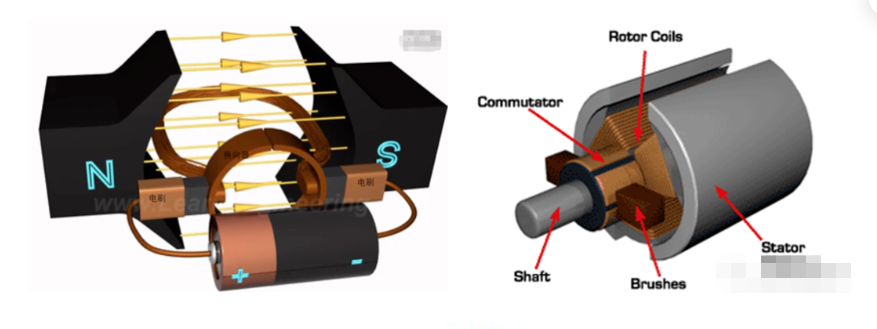
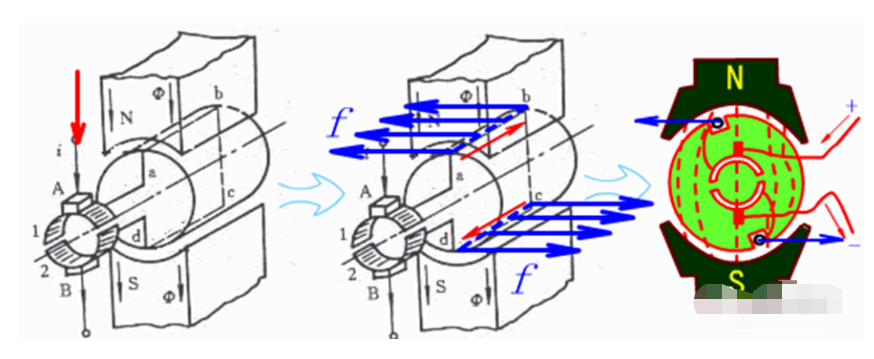
อ่านฟิสิกส์ระดับมัธยมของพวกอันธพาลรู้ เพื่อศึกษาตัวนำที่มีพลังในสนามแม่เหล็กของสิ่งนั้น เราได้ฝึกมือซ้ายให้เป็นฝ่ามือหัก ซึ่งเป็นหลักการของมอเตอร์เหนี่ยวนำไฟฟ้ากระแสตรงทุกประการ
มอเตอร์ไฟฟ้าทั้งหมดประกอบด้วยสเตเตอร์และโรเตอร์ ในมอเตอร์ไฟฟ้ากระแสตรง เพื่อให้โรเตอร์หมุน คุณต้องเปลี่ยนทิศทางของกระแสน้ำตลอดเวลา มิฉะนั้นโรเตอร์จะหมุนได้เพียงครึ่งรอบเท่านั้น ซึ่งเหมือนกับการเหยียบจักรยาน .
That's why DC motors need commutators.
โดยทั่วไปแล้ว มอเตอร์กระแสตรงแบบมีแปรงถ่านจะรวมถึงมอเตอร์แบบมีแปรงถ่านและมอเตอร์แบบไร้แปรงถ่าน
มอเตอร์แปรงเรียกอีกอย่างว่ามอเตอร์เหนี่ยวนำกระแสตรงหรือมอเตอร์แปรงถ่านซึ่งมักเรียกกันว่ามอเตอร์กระแสตรงแบบแปรง
มันใช้การสับเปลี่ยนเชิงกล ขั้วภายนอกไม่ขยับ ขดลวดภายใน (กระดอง) เคลื่อนที่ ตัวสับเปลี่ยนและขดลวดโรเตอร์หมุนพร้อมกัน แปรงและแม่เหล็กไม่เคลื่อนที่ ดังนั้นแรงเสียดทานของคอมมิวเตเตอร์และแปรงขัด ทำให้การเปลี่ยนทิศทางปัจจุบันเสร็จสมบูรณ์
ข้อเสียของมอเตอร์แปรงถ่าน
1, การเปลี่ยนเชิงกลของประกายไฟที่เกิดจากตัวสับเปลี่ยนและแรงเสียดทานของแปรง, การรบกวนทางแม่เหล็กไฟฟ้า, สัญญาณรบกวนสูง, อายุการใช้งานสั้น
2, ความน่าเชื่อถือต่ำ, ความล้มเหลวจำนวนมาก, ต้องบำรุงรักษาบ่อยครั้ง.
3 เนื่องจากมีการสับเปลี่ยน จำกัด ความเฉื่อยของโรเตอร์ จำกัด ความเร็วสูงสุด ส่งผลต่อประสิทธิภาพไดนามิก
เนื่องจากมีข้อบกพร่องมากมาย ทำไมจึงยังคงใช้กันทั่วไป เนื่องจากมีแรงบิดสูง โครงสร้างง่าย บำรุงรักษาง่าย (เช่น เปลี่ยนแปรงถ่าน) ราคาถูก
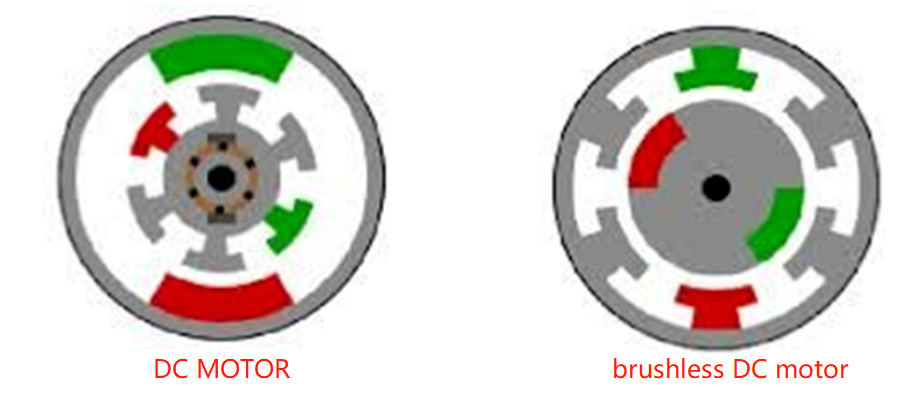
2. DC motors - brushless motors
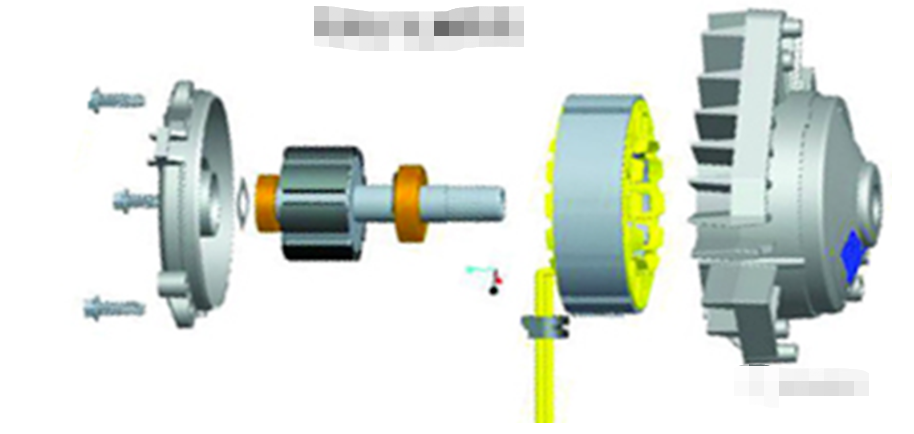
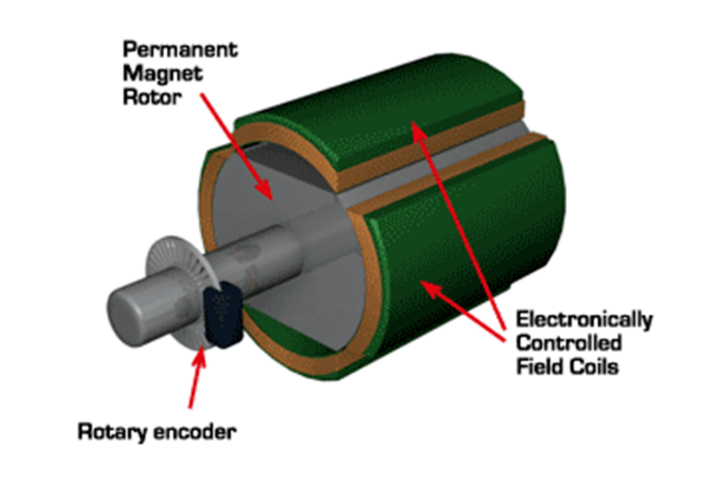
มอเตอร์ไร้แปรงถ่านเรียกอีกอย่างว่ามอเตอร์อินเวอร์เตอร์กระแสตรง (BLDC) ในบางสาขา จะใช้การสับเปลี่ยนทางอิเล็กทรอนิกส์ (เซ็นเซอร์ Hall) ขดลวด (กระดอง) ไม่เคลื่อนขั้วแม่เหล็ก จากนั้นแม่เหล็กถาวรสามารถอยู่นอกขดลวดหรือภายในขดลวด ดังนั้นจึงมีมอเตอร์ไร้แปรงโรเตอร์ภายนอกและมอเตอร์ไร้แปรงโรเตอร์ภายใน
มอเตอร์ไร้แปรงถ่านถูกสร้างขึ้นในลักษณะเดียวกับมอเตอร์ซิงโครนัสแม่เหล็กถาวร
อย่างไรก็ตาม มอเตอร์ไร้แปรงถ่านเพียงตัวเดียวไม่ใช่ระบบพลังงานที่สมบูรณ์ โดยพื้นฐานแล้วแปรงถ่านจะต้องถูกควบคุมโดยคอนโทรลเลอร์ไร้แปรงถ่านหรือที่เรียกว่า ESC เพื่อให้การทำงานเป็นไปอย่างต่อเนื่อง
ตัวควบคุมอิเล็กทรอนิกส์ไร้แปรงถ่าน (ESC) ที่กำหนดประสิทธิภาพอย่างแท้จริง
โดยทั่วไป มีกระแสขับสองประเภทสำหรับมอเตอร์แบบไร้แปรงถ่าน ประเภทหนึ่งคือคลื่นสี่เหลี่ยมและอีกประเภทหนึ่งคือคลื่นไซน์
บางครั้งแบบแรกเรียกว่ามอเตอร์ DC แบบไม่มีแปรง และแบบหลังเรียกว่าเซอร์โวมอเตอร์แบบ AC ซึ่งก็เหมือนกับเซอร์โวมอเตอร์แบบกระแสสลับ
มอเตอร์ไร้แปรงถ่านทำงานในลักษณะต่างๆ กัน และสามารถแบ่งออกเป็นมอเตอร์ไร้แปรงถ่านโรเตอร์ด้านในและมอเตอร์ไร้แปรงถ่านโรเตอร์ด้านนอก
โรเตอร์ด้านในเป็นแบบสามเฟสซึ่งมีราคาแพงกว่า
โรเตอร์ด้านนอกมักจะใช้ในเฟสเดียว ราคาของคน การผลิตจำนวนมากได้ใกล้เคียงกับมอเตอร์แปรงถ่าน ดังนั้นในช่วงไม่กี่ปีที่ผ่านมาจึงมีการใช้กันอย่างแพร่หลาย
ราคาของโรเตอร์สามเฟสด้านนอกนั้นใกล้เคียงกับราคาของโรเตอร์ด้านใน
อย่างที่คุณเดาได้ ข้อเสียของมอเตอร์แปรงถ่านก็คือข้อดีของมอเตอร์ไร้แปรงถ่าน
มีประสิทธิภาพสูง, ใช้พลังงานต่ำ, เสียงรบกวนต่ำ, อายุการใช้งานยาวนาน, ความน่าเชื่อถือสูง, การควบคุมเซอร์โว, ความเร็วในการแปลงความถี่แบบไม่มีขั้นบันได (จนถึงความเร็วสูงมาก) และข้อดีอื่นๆ
It is relatively smaller than the brush DC motor, control than the asynchronous AC motor is simple, the starting torque is large overload capacity, as for the disadvantages ...... is more expensive than the brush, bad maintenance.
2. DC motor - speed control principle
การควบคุมความเร็วของมอเตอร์เหนี่ยวนำกระแสตรง: การควบคุมความเร็วที่เรียกว่านั่นคือโดยการปรับความเร็วของมอเตอร์เพื่อให้ได้แรงบิดที่ต้องการ
มอเตอร์แม่เหล็กถาวร dc โดยการปรับแรงดันไฟฟ้า ความต้านทานชุด เปลี่ยนการกระตุ้นสามารถเป็นความเร็ว แต่การปรับแรงดันไฟฟ้าจริงสะดวกที่สุด และใช้กันมากที่สุด หลักใช้ของการควบคุมความเร็ว PWM
PWM เป็นจริงผ่านสวิตช์ความเร็วสูงเพื่อให้ได้การควบคุมแรงดันไฟฟ้ากระแสตรง, รอบ, เปิดเป็นเวลานาน, แรงดันไฟฟ้าเฉลี่ยสูง, ปิดเป็นเวลานาน, แรงดันไฟฟ้าเฉลี่ยต่ำ, สะดวกมากในการปรับ, ตราบใดที่สวิตช์ ความเร็ว ตราบเท่าที่ความเร็วในการเปลี่ยนเร็วเพียงพอ ฮาร์มอนิกของกริดจะน้อยลง และกระแสจะต่อเนื่องมากขึ้น
อย่างไรก็ตาม แปรงและคอมมิวเตเตอร์มีการสึกหรอเป็นเวลานาน และในขณะเดียวกันก็มีการเปลี่ยนแปลงของกระแสไฟฟ้าอย่างมากระหว่างการเปลี่ยน ซึ่งทำให้เกิดประกายไฟได้ง่ายมาก
ตัวสับเปลี่ยนและแปรงจำกัดความจุและความเร็วของมอเตอร์เหนี่ยวนำกระแสตรง ซึ่งทำให้การควบคุมความเร็วของมอเตอร์เหนี่ยวนำกระแสตรงพบกับปัญหาคอขวด
สำหรับมอเตอร์เหนี่ยวนำกระแสตรงแบบไร้แปรงถ่าน การควบคุมความเร็วจะควบคุมเฉพาะแรงดันไฟฟ้าอินพุตบนพื้นผิวเท่านั้น
But the motor's self-control frequency control system (brushless DC motor itself comes with a rotor position detector and other rotor position signal acquisition device, using the rotor position signal of this device to control the variable voltage frequency control device phase change moment) automatically controls the frequency according to the variable voltage, which is almost the same as the DC (brushed) motor, very convenient. Very convenient.
เนื่องจากโรเตอร์ใช้แม่เหล็กถาวร ไม่มีขดลวดกระตุ้นพิเศษ ในกรณีที่มีความจุเท่ากัน มอเตอร์จะมีขนาดเล็กกว่า เบากว่า มีประสิทธิภาพมากกว่า กะทัดรัดกว่า การทำงานที่เชื่อถือได้มากกว่า ประสิทธิภาพไดนามิกที่ดีกว่า ในการขับเคลื่อนของยานพาหนะไฟฟ้าและด้านอื่นๆ ถูกนำมาใช้อย่างแพร่หลาย
3. Three-phase AC motors - asynchronous motors
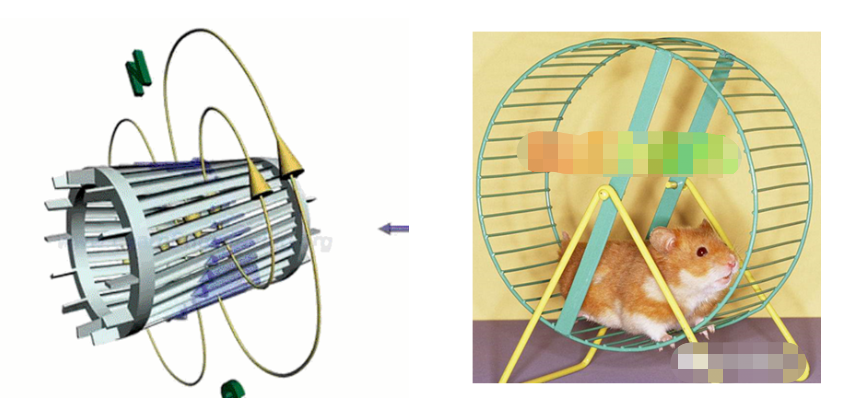
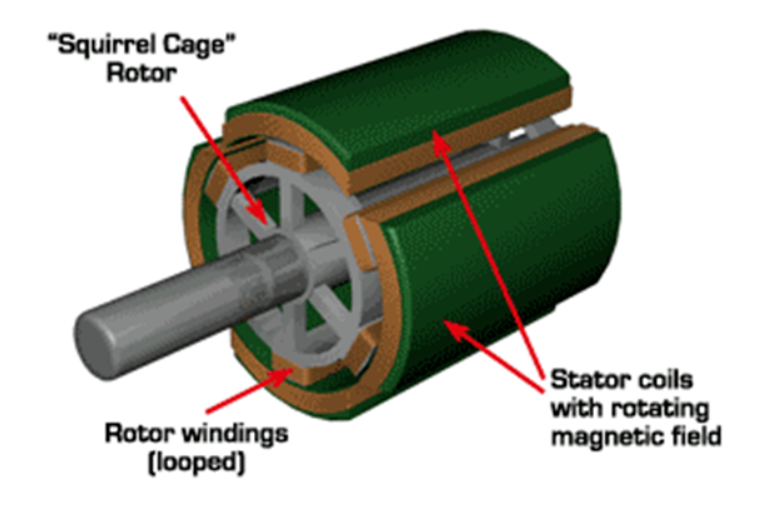
มอเตอร์ไฟฟ้ากระแสสลับแบ่งออกเป็นมอเตอร์แบบซิงโครนัสและมอเตอร์แบบอะซิงโครนัส มอเตอร์ซิงโครนัสส่วนใหญ่จะใช้ในเครื่องกำเนิดไฟฟ้า และมอเตอร์แบบอะซิงโครนัสส่วนใหญ่จะใช้ในมอเตอร์ไฟฟ้า เป็นมอเตอร์เหนี่ยวนำกรงกระรอก
ตัวเรือนของมอเตอร์คือสเตเตอร์ และมีขดลวดไฟฟ้ากระแสสลับแบบสมมาตรสามเส้นบนสเตเตอร์
เมื่อลำดับของทั้งสามเฟสเปลี่ยนไป สนามแม่เหล็กสังเคราะห์แบบหมุนจะเกิดขึ้น และความเร็วรอบของสนามแม่เหล็กคือความเร็วซิงโครนัส
ความเร็วซิงโครนัส n=60f/p, f คือความถี่, p คือจำนวนคู่ขั้ว ตัวอย่างเช่น สำหรับมอเตอร์ 2 ขั้วที่เชื่อมต่อกับกริดแห่งชาติ 50Hz (เช่น จำนวนคู่ขั้วคือ 1 คู่) จากนั้น ความเร็ว n=60*50/1=3000r/min.
ในทำนองเดียวกัน ความเร็วซิงโครนัสของมอเตอร์ 4 ขั้ว 6 ขั้ว และ 8 ขั้วคือ 1500, 1,000 และ 750
มอเตอร์แบบอะซิงโครนัสมีกลไกอย่างง่ายด้วยโรเตอร์แบบขดปิด เช่น แบบกรงกระรอก
ขดลวดโรเตอร์จะตัดสนามแม่เหล็กที่กำลังหมุนเพื่อสร้างศักย์ไฟฟ้าเหนี่ยวนำ ซึ่งจะสร้างกระแสเหนี่ยวนำและสนามแม่เหล็กหมุนในที่สุด
เพื่อให้โรเตอร์กลายเป็นแม่เหล็กไฟฟ้าและจะเป็นไปตามการหมุนของสนามแม่เหล็กสเตเตอร์ ดังนั้น ความเร็วของโรเตอร์จะต้อง < สนามแม่เหล็กหมุนของสเตเตอร์ เพื่อตัดเส้นเหนี่ยวนำแม่เหล็ก
The public number "Mechanical Engineering Digest", a refueling station for engineers!
นั่นคือความเร็วแบบอะซิงโครนัสของโรเตอร์ <ความเร็วซิงโครนัส มีความแตกต่างของความเร็วระหว่างสนามแม่เหล็กของโรเตอร์และสเตเตอร์ ดังนั้นจึงเรียกว่ามอเตอร์แบบอะซิงโครนัส
ความเร็วสูงสุดของมอเตอร์แบบอะซิงโครนัสจะแตกต่างกันไปเล็กน้อยจากผู้ผลิตไปยังผู้ผลิต ประมาณ 2800+รอบ/นาที สำหรับมอเตอร์แบบ 2 ขั้ว, 1400+,950+,700+ สำหรับแบบอะซิงโครนัส 4 ขั้ว, 6 ขั้ว และ 8 ขั้ว
ความเร็วของมอเตอร์แบบอะซิงโครนัสจะสูงเมื่อไม่มีโหลด และจะลดลงเมื่อมีโหลด
มอเตอร์แบบอะซิงโครนัสมีโครงสร้างที่เรียบง่าย บำรุงรักษาง่าย การทำงานที่เชื่อถือได้ และราคาถูก ดังนั้นจึงใช้กันอย่างแพร่หลาย
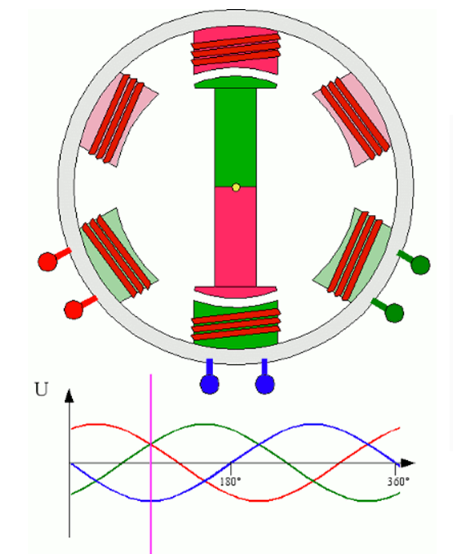
4. Three-phase AC motors - synchronous motors
มอเตอร์ซิงโครนัส
หากคุณปล่อยให้ความเร็วของโรเตอร์ = ความเร็วในการหมุนของสนามแม่เหล็กของสเตเตอร์ มันจะกลายเป็นมอเตอร์ซิงโครนัส ในเวลานี้จำเป็นต้องเปลี่ยนสเตเตอร์ให้เป็นแม่เหล็กไฟฟ้าหรือแม่เหล็กถาวร นั่นคือเพื่อเพิ่มพลังงานให้กับสเตเตอร์ ในเวลานี้ไม่จำเป็นต้องใช้อีกต่อไป เพื่อตัดเส้นเหนี่ยวนำแม่เหล็กสามารถหมุนได้ ความเร็วในการหมุนและความเร็วในการหมุนของสนามแม่เหล็กจะเท่ากัน นั่นคือ การก่อตัวของมอเตอร์ซิงโครนัส
โครงสร้างโรเตอร์ของมอเตอร์แบบซิงโครนัสมีความซับซ้อนมากกว่ามอเตอร์แบบอะซิงโครนัส ราคาสูง ในชีวิตการผลิตไม่ได้ใช้กันอย่างแพร่หลายเหมือนกับมอเตอร์แบบอะซิงโครนัส ส่วนใหญ่ใช้เป็นเครื่องกำเนิดไฟฟ้า ปัจจุบันโรงไฟฟ้าพลังความร้อน โรงไฟฟ้าพลังน้ำ กังหันไอน้ำ กังหันไฮดรอลิกเป็นมอเตอร์แบบซิงโครนัสโดยทั่วไป
5. Three-phase AC motor - asynchronous electric motors speed regulation
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส: ในทางทฤษฎี การควบคุมมอเตอร์แบบอะซิงโครนัสความถี่ AC แรงดันไฟฟ้า หรือความต้านทานของโรเตอร์ การกระจายขั้วของมอเตอร์สามารถควบคุมความเร็วได้ แต่ในทางปฏิบัติเพื่อให้ได้การควบคุมความเร็วที่ไม่สิ้นสุดด้วยวิธีการปรับความถี่และแรงดันไฟฟ้าเพื่อให้บรรลุ
เนื่องจากช่วงความเร็วของการควบคุมแรงดันไฟฟ้าไม่ใหญ่ โดยทั่วไปสามารถใช้ได้เฉพาะในความต้องการควบคุมความเร็วที่ไม่สูง แอปพลิเคชันไม่แพร่หลาย
การควบคุมความเร็วความถี่แบบแปรผัน: พูดถึงความถี่ เราอาจเคยได้ยินมาบ้างแล้ว
ชื่อเต็มของการแปลงความถี่คือ Variable Voltage Variable Frequency (VVVF) ซึ่งหมายความว่าแรงดันไฟฟ้าจะเปลี่ยนแปลงเมื่อความถี่เปลี่ยนไป เพื่อให้ช่วงความเร็วของมอเตอร์แบบอะซิงโครนัสมีขนาดใหญ่เพียงพอ
ตัวแปลงความถี่สามารถแบ่งออกได้เป็นสองประเภทกว้างๆ: ตัวแปลงความถี่ AC-AC และตัวแปลงความถี่ AC-DC
อินเวอร์เตอร์ AC-DC: ไฟ AC จะถูกแปลงโดยตรงเป็นไฟ AC ของความถี่อื่นโดยอุปกรณ์อิเล็กทรอนิกส์กำลัง
ความถี่เอาต์พุตสูงสุดต้องไม่เกินครึ่งหนึ่งของความถี่อินพุต ดังนั้นโดยทั่วไปจะใช้เฉพาะในระบบความเร็วต่ำความจุสูงเท่านั้น และสามารถขจัดความจำเป็นในการใช้ตัวลดเกียร์ขนาดใหญ่ได้
อินเวอร์เตอร์ AC-DC จะแก้ไขไฟ AC เป็น DC ก่อน จากนั้นเปลี่ยนเป็นไฟฟ้ากระแสสลับด้วยความถี่และแรงดันไฟฟ้าที่ควบคุมได้ผ่านอินเวอร์เตอร์ ด้วยเทคโนโลยี PWM อินเวอร์เตอร์ชนิดนี้สามารถรับแรงดันไฟฟ้าและความถี่ที่หลากหลายได้
สำหรับรถยนต์ไฟฟ้า มอเตอร์แบบอะซิงโครนัสมีความทนทาน มีความสามารถในการโอเวอร์โหลดสูง และอัลกอริทึมการควบคุมนั้นสมบูรณ์จนสามารถใช้งานได้อย่างสมบูรณ์
6. Three-phase AC motor - speed regulation of synchronous motor
การควบคุมความเร็วมอเตอร์แบบซิงโครนัส:
เครื่องซิงโครนัสไม่มีอัตราการเปิดเครื่อง และแรงดันไฟฟ้าควบคุมไม่สามารถเปลี่ยนความเร็วได้เมื่อกำหนดโครงสร้าง ดังนั้นก่อนที่จะมีตัวแปลงความถี่ มอเตอร์ซิงโครนัสไม่ได้รับการควบคุมอย่างสมบูรณ์
ลักษณะที่ปรากฏของตัวแปลงความถี่ทำให้มอเตอร์ซิงโครนัส AC มีช่วงการควบคุมความเร็วที่กว้าง เนื่องจากโรเตอร์ยังมีการกระตุ้นอิสระ (แม่เหล็กถาวรหรือการกระตุ้นด้วยไฟฟ้า) ช่วงการควบคุมความเร็วจึงกว้างกว่ามอเตอร์แบบอะซิงโครนัส และมอเตอร์ซิงโครนัสมี ได้รับชีวิตใหม่
ระบบควบคุมความเร็วตัวแปรความถี่ตัวแปรแรงดันไฟฟ้าแบบซิงโครนัสสามารถแบ่งออกเป็นการควบคุมความเร็วตัวแปรอื่น ๆ ที่ควบคุมและการควบคุมความเร็วตัวแปรที่ควบคุมด้วยตนเอง
สำหรับการควบคุมความเร็วความถี่ตัวแปรที่ควบคุมแบบอื่นๆ จะคล้ายกับการควบคุมความถี่ตัวแปรของมอเตอร์แบบอะซิงโครนัส ซึ่งสามารถควบคุมได้โดย SVPWM และวิธีการควบคุมอื่นๆ ตามแบบจำลองทางคณิตศาสตร์ และประสิทธิภาพของมันจะดีกว่ามอเตอร์แบบอะซิงโครนัส AC แบบธรรมดา
มอเตอร์ซิงโครนัสอินเวอร์เตอร์แบบควบคุมตัวเองมีชื่อเรียกที่หลากหลายในกระบวนการพัฒนา เช่น มอเตอร์แบบไร้ตัวสับเปลี่ยนทิศทาง เมื่อใช้แม่เหล็กถาวรและป้อนคลื่นไซน์สามเฟส สามารถเรียกว่ามอเตอร์ซิงโครนัสแม่เหล็กถาวรคลื่นไซน์ และถ้าป้อนคลื่นสี่เหลี่ยม ก็สามารถเรียกว่ามอเตอร์ซิงโครนัสแม่เหล็กถาวรแบบคลื่นสี่เหลี่ยมคางหมู ใช่ มันคล้ายกับเครื่อง DC แบบไร้แปรงถ่าน (BLDM) ที่กล่าวไปก่อนหน้านี้ เราไม่รู้สึกว่าวงกลมขนาดใหญ่ของการแร็พหันกลับไป แต่คุณ ตอนนี้ต้องมีความเข้าใจที่ลึกซึ้งยิ่งขึ้นเกี่ยวกับความเร็วตัวแปร ดังนั้นมอเตอร์ DC แบบไม่มีแปรงเมื่อใช้อินพุต DC แต่ใช้เทคโนโลยีการแปลงความถี่มอเตอร์ซิงโครนัส (โครงสร้างเดียวกับมอเตอร์ซิงโครนัสแม่เหล็กถาวร) ใน Model3 เกี่ยวกับการใช้มอเตอร์ DC แบบไร้แปรงถ่าน .
7. Single-phase AC asynchronous motor - single-phase AC series-excited motor (brush)
มอเตอร์กระตุ้นซีรีส์ AC เฟสเดียว หรือที่เรียกกันทั่วไปว่ามอเตอร์ซีรีส์ตื่นเต้นหรือมอเตอร์สากล (ชื่อต่างประเทศของ UniversalMotor ตั้งชื่อตาม AC และ DC สากล) ขดลวดกระดองและขดลวดกระตุ้นเชื่อมต่อเป็นอนุกรมเพื่อทำงานร่วมกัน
มอเตอร์แบบตื่นเต้นแบบเฟสเดียวเรียกอีกอย่างว่ามอเตอร์แบบตื่นเต้นแบบใช้คู่แบบ AC-DC ซึ่งสามารถทำงานร่วมกับไฟ AC หรือไฟ DC
The public number "Mechanical Engineering Literature", the refueling station for engineers!
ข้อดีของมอเตอร์แบบอนุกรมเฟสเดียวคือมีความเร็วสูง แรงบิดเริ่มต้นสูง ขนาดเล็ก น้ำหนักเบา ไม่บล็อกการหมุนง่าย แรงดันไฟฟ้าที่ใช้งานได้หลากหลาย และสามารถควบคุมความเร็วได้โดยวิธีการควบคุมแรงดันไฟฟ้า ซึ่งง่ายและเข้าใจได้ง่าย
ดังนั้นจึงใช้กันอย่างแพร่หลายในเครื่องมือไฟฟ้า เช่น เครื่องเจียรไฟฟ้า สว่านมือ เป็นต้น
โครงสร้างของมอเตอร์แบบตื่นเต้นแบบเฟสเดียวนั้นคล้ายกันมากกับมอเตอร์แบบตื่นเต้นแบบ DC ความแตกต่างหลักคือแกนสเตเตอร์ของมอเตอร์แบบตื่นเต้นแบบเฟสเดียวจะต้องทำจากเหล็กซิลิกอนเคลือบ ในขณะที่ขั้วแม่เหล็ก ของ DC สามารถทำจากโครงสร้างแบบลามิเนตและแบบรวม
การควบคุมความเร็วมอเตอร์แบบตื่นเต้นแบบเฟสเดียว วิธีการส่วนใหญ่ที่ใช้ในการปรับแรงดันไฟฟ้าคือการเปลี่ยนศักย์ไฟฟ้า
วิธีการควบคุมแรงดันไฟฟ้าของมอเตอร์แบบกระตุ้นอนุกรมเฟสเดียวใช้การควบคุมแรงดันไฟฟ้าเปลี่ยนเฟสแบบควบคุม ซึ่งใช้แรงดันทริกเกอร์ของ SCR เพื่อหน่วงหลังแรงดันอินพุตเพื่อให้ได้ทริกเกอร์การเปลี่ยนเฟสของแรงดันอินพุต
มีวิธีฮาร์ดแวร์และซอฟต์แวร์ในการใช้งาน
วิธีการควบคุมแรงดันไฟฟ้าโดยใช้เทคโนโลยีการควบคุมความเร็วที่ควบคุมด้วยซิลิกอน มีเส้นที่เรียบง่าย ส่วนประกอบขนาดเล็ก และลักษณะอื่นๆ ของวิธีการที่ง่ายและมีประสิทธิภาพที่ควบคุมด้วยซิลิกอน
(a) เส้นโค้งการแปรผันของกระแสไฟฟ้ากระแสสลับ
(b) ทิศทางการหมุนของโรเตอร์เมื่อกระแสเป็นครึ่งคลื่นบวก
(c) ทิศทางการหมุนของโรเตอร์เมื่อกระแสเป็นลบครึ่งคลื่น

8. Single-phase AC asynchronous motor - single-phase AC squirrel-cage motor (brushless)
กระแสเฟสเดียวผ่านขดลวดอาร์มาเจอร์สร้างสนามแม่เหล็กที่เต้นเป็นจังหวะแทนที่จะเป็นสนามแม่เหล็กหมุน ดังนั้นมอเตอร์แบบอะซิงโครนัสเฟสเดียวจึงไม่สามารถสตาร์ทได้เอง
เพื่อแก้ปัญหาการสตาร์ท มอเตอร์แบบอะซิงโครนัสที่ใช้พลังงานไฟฟ้ากระแสสลับแบบเฟสเดียวมักถูกทำให้เป็นสองเฟส
ขดลวดหลักใช้พลังงานโดยตรงจากแหล่งจ่ายไฟเฟสเดียว ขดลวดทุติยภูมิแตกต่างจากขดลวดหลักเชิงพื้นที่ 90° (มุมไฟฟ้า เท่ากับมุมกลหารด้วยจำนวนคู่ขั้วมอเตอร์)
ขดลวดทุติยภูมิเชื่อมต่อกับแหล่งจ่ายไฟ AC เฟสเดียวหลังจากการเชื่อมต่อแบบอนุกรมของตัวเก็บประจุหรือตัวต้านทาน เพื่อให้กระแสที่ไหลผ่านและกระแสในขดลวดหลักมีความต่างเฟสที่แน่นอน
สิ่งนี้ทำให้สนามแม่เหล็กสังเคราะห์เป็นสนามหมุนเป็นวงรี หรือบางทีอาจใกล้เคียงกับสนามแม่เหล็กหมุนเป็นวงกลมด้วยซ้ำ
มอเตอร์จึงได้รับแรงบิดเริ่มต้น
มอเตอร์ที่ใช้วิธีการแยกเฟสด้วยความต้านทานมีราคาไม่แพง ตัวอย่างเช่น ขดลวดทุติยภูมิสามารถพันด้วยลวดที่บางกว่าได้ แต่ผลการแยกเฟสไม่ดีและใช้พลังงานในความต้านทาน
หลังจากที่มอเตอร์เริ่มทำงานและมีความเร็วถึงระดับหนึ่ง โดยปกติแล้ว ขดลวดทุติยภูมิจะถูกเอาออกโดยอัตโนมัติโดยสวิตช์แรงเหวี่ยงที่ติดตั้งบนเพลามอเตอร์ เพื่อลดการสูญเสียความต้านทานและปรับปรุงประสิทธิภาพการทำงาน
โดยทั่วไปจะใช้กับงานที่ต้องการแรงบิดเริ่มต้นไม่สูงนัก เช่น เครื่องกลึงขนาดเล็ก ตู้เย็นขนาดเล็ก เป็นต้น ข้อเสียคือไม่สามารถปรับความเร็วรอบได้
เป็นไปได้ที่จะทำให้สนามแม่เหล็กสังเคราะห์ของมอเตอร์ใกล้กับสนามแม่เหล็กหมุนแบบวงกลมที่จุดทำงานเฉพาะของมอเตอร์ เพื่อให้ได้ลักษณะการทำงานที่ดีขึ้น
เพื่อให้มอเตอร์อะซิงโครนัสแบบแยกเฟสได้รับประสิทธิภาพการเริ่มต้นที่ดีขึ้นหรือลักษณะการทำงานที่ดีขึ้นหรือทั้งสองอย่าง ความจุ (จำนวนค่า) ที่ต้องการจะแตกต่างกันและสามารถแบ่งออกเป็นสามประเภท
9. stepper motors - open-loop stepper motors
สเต็ปเปอร์มอเตอร์ (วงเปิด) เป็นมอเตอร์ควบคุมวงเปิดที่แปลงสัญญาณพัลส์ไฟฟ้าเป็นการกระจัดเชิงมุม และใช้กันอย่างแพร่หลายมาก
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
จำนวนของพัลส์สามารถควบคุมได้เพื่อควบคุมปริมาณการเคลื่อนที่เชิงมุม เพื่อให้บรรลุวัตถุประสงค์ของตำแหน่งที่แม่นยำ ในเวลาเดียวกัน ความถี่พัลส์สามารถควบคุมได้เพื่อควบคุมความเร็วและความเร่งของการหมุนของมอเตอร์ เพื่อให้บรรลุวัตถุประสงค์ของการควบคุมความเร็ว
สเต็ปเปอร์มอเตอร์เป็นมอเตอร์เหนี่ยวนำชนิดหนึ่งซึ่งทำงานโดยใช้วงจรอิเล็กทรอนิกส์ เช่น ไดรเวอร์ เพื่อเปลี่ยนไฟฟ้ากระแสตรงให้เป็นกระแสควบคุมไทม์มิ่งหลายเฟสที่ขับเคลื่อนด้วยไทม์แชร์
แม้ว่าสเต็ปเปอร์มอเตอร์จะใช้พลังงานจากกระแสตรง แต่ก็ไม่สามารถเข้าใจได้ว่าเป็นมอเตอร์กระแสตรง ซึ่งเป็นมอเตอร์ไฟฟ้าที่แปลงพลังงานไฟฟ้ากระแสตรงเป็นพลังงานกล ในขณะที่สเต็ปเปอร์มอเตอร์เป็นมอเตอร์ควบคุมวงจรเปิดที่แปลงสัญญาณพัลส์ไฟฟ้าเป็นการกระจัดเชิงมุม
10. Stepper motor - stepper servo comparison
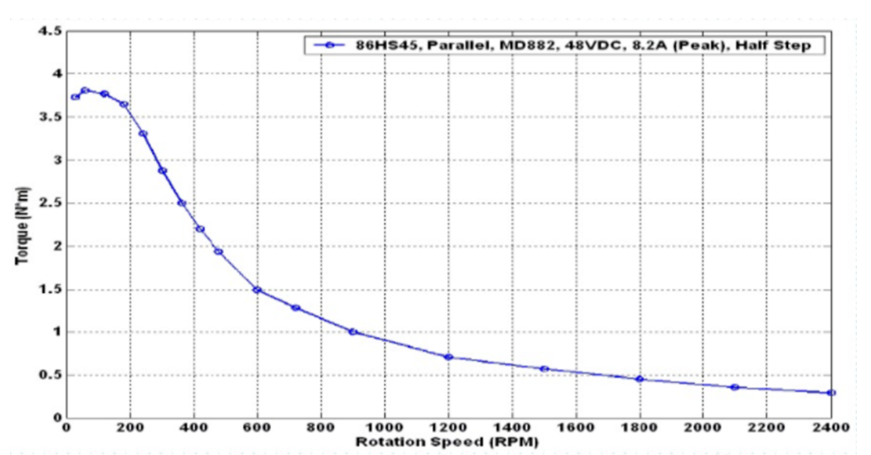
Note that stepper motors are used in low-speed applications - no more than 1000r/min per minute, the best working range is 150~500r/min, (closed-loop stepping up to 1500).
สเต็ปเปอร์มอเตอร์ 2 เฟสที่ 60 ~ 70 รอบ/นาที มีแนวโน้มที่จะเกิดปรากฏการณ์เรโซแนนซ์ความเร็วต่ำ สร้างการสั่นสะเทือนและเสียงรบกวน ซึ่งจำเป็นต้องหลีกเลี่ยงโดยการเปลี่ยนอัตราส่วนการลด เพิ่มเศษละเอียด เพิ่มแดมเปอร์แม่เหล็ก ฯลฯ
ข้อควรระวังด้านความแม่นยำของการแบ่งย่อย เมื่อระดับการแบ่งย่อยมากกว่า 4 จะไม่สามารถรับประกันความถูกต้องของมุมสเต็ปได้ ความต้องการความแม่นยำสูง วิธีที่ดีที่สุดคือเปลี่ยนไปใช้เฟสอื่นๆ (เช่น มุมสเต็ปที่เล็กลง) ของสเต็ปเปอร์มอเตอร์หรือแบบปิด สเต็ปเปอร์ลูป, เซอร์โวมอเตอร์
(วงเปิด) สเต็ปเปอร์มอเตอร์และเซอร์โวมอเตอร์ 7 แบบที่แตกต่างกัน
A control accuracy - servo motor control accuracy can be set according to the encoder, higher accuracy.
B low-frequency characteristics - stepper motors are prone to vibration at low frequencies, servo motors do not.
C moment-frequency characteristics - stepper motor torque becomes smaller with the increase in speed, so its maximum operating speed is generally in <1,000r/min, เซอร์โวมอเตอร์ในความเร็วที่กำหนด (โดยทั่วไปคือ 3000r/min) สามารถส่งออกแรงบิดที่กำหนด, ในความเร็วที่กำหนดเหนือกำลังไฟฟ้าคงที่, ความเร็วสูงสุดถึง 5,000 r/min;
D overload capacity - stepper motor can not be overloaded, servo motor maximum torque can be overloaded 3 times.
E operating performance - stepper motor for open-loop control, servo motor when closed-loop control.
F speed response - stepper motor start-up time 0.15 ~ 0.5s, servo motor 0.05 ~ 0.1, the fastest 0.01s to reach the rated 3000r / min.
G efficiency indicators - stepper motor efficiency of about 60%, servo motor about 80%.
ในการใช้งานจริงจะพบ: เซอร์โวมอเตอร์มีราคาแพง ราคาแพงมาก ดังนั้นซิงโครนัสมอเตอร์จึงใช้กันอย่างแพร่หลาย โดยเฉพาะอย่างยิ่งในความต้องการความแม่นยำของตำแหน่ง สายพานซิงโครนัสไม่สูงมาก สายพานแบน และโอกาสอื่น ๆ มักจะใช้สเต็ปเปอร์มอเตอร์
11. Stepper motors - closed-loop stepper motors
สเต็ปเปอร์มอเตอร์วงปิด: นอกจากสเต็ปเปอร์มอเตอร์วงเปิดแล้ว ยังมีสเต็ปเปอร์มอเตอร์ที่มีตัวเข้ารหัสเพิ่มที่ส่วนท้ายของมอเตอร์ ทำให้สามารถควบคุมวงปิดได้
การควบคุมสเต็ปเปอร์มอเตอร์แบบวงปิดใช้การป้อนกลับตำแหน่งและ/หรือความเร็วป้อนกลับเพื่อกำหนดการเปลี่ยนเฟสที่เหมาะสมกับตำแหน่งโรเตอร์ ซึ่งสามารถปรับปรุงประสิทธิภาพของสเต็ปเปอร์มอเตอร์ได้อย่างมาก
ระบบเซอร์โวที่ไม่มีปรากฏการณ์นอกขั้นตอน
ข้อดีของสเต็ปเปอร์มอเตอร์วงปิด
1. การตอบสนองความเร็วสูง เมื่อเปรียบเทียบกับมอเตอร์ที่เหมาะสม สเต็ปเปอร์วงปิดมีการปฏิบัติตามคำสั่งการกำหนดตำแหน่งอย่างมาก ดังนั้นเวลาในการกำหนดตำแหน่งจึงสั้นมาก ในการใช้งานการเริ่ม/หยุดบ่อยครั้ง เวลาในการจัดตำแหน่งสามารถสั้นลงได้อย่างมาก
2. สร้างแรงบิดได้มากกว่าเซอร์โวทั่วไป ชดเชยการสูญเสียสเต็ปและการสั่นที่ความเร็วต่ำของระบบสเต็ปเปอร์ทั่วไป
3. สามารถสร้างแรงบิดสูงได้แม้ภายใต้โหลด 100% โดยไม่สูญเสียการทำงานของสเต็ป โดยไม่ต้องคำนึงถึงการสูญเสียแรงบิดและปัญหาอื่น ๆ เช่นระบบสเต็ปธรรมดา
4. เมื่อใช้ไดรฟ์วงปิด ประสิทธิภาพจะเพิ่มขึ้นเป็น 7.8 เท่า กำลังขับเพิ่มขึ้นเป็น 3.3 เท่า และความเร็วเพิ่มขึ้นเป็น 3.6 เท่า
สามารถวิ่งได้เร็วกว่า เสถียรกว่า และความเร็วที่นุ่มนวลกว่าการควบคุมแบบ open-loop
5. สเต็ปเปอร์มอเตอร์จะหยุดนิ่งอย่างสมบูรณ์เมื่อหยุดทำงาน โดยไม่มีปรากฏการณ์การสั่นสะเทือนขนาดเล็กของเซอร์โวธรรมดา
สามารถแทนที่การใช้ระบบเซอร์โวเอนกประสงค์เมื่อต้องการต้นทุนต่ำและตำแหน่งที่มีความแม่นยำสูง
12. stepper motor - stepper closed-loop servo comparison
สเต็ปเปอร์มอเตอร์แบบวงปิดจะปรับขนาดกระแสไฟฟ้าที่คดเคี้ยวโดยอัตโนมัติตามขนาดของโหลด ความร้อนและการสั่นสะเทือนน้อยกว่าสเต็ปเปอร์แบบวงเปิด มีการตอบสนองของตัวเข้ารหัส ดังนั้นความแม่นยำจึงสูงกว่าสเต็ปเปอร์มอเตอร์ทั่วไป การตอบสนองของมอเตอร์มากกว่าแบบวงเปิด สเต็ปเปอร์ช้ากว่าเซอร์โวมอเตอร์เร็วกว่า มีตำแหน่งผิดพลาดระหว่างการทำงาน ข้อผิดพลาดจะค่อยๆ ลดลงในหน่วยมิลลิวินาทีหลังจากหยุดคำสั่ง
แรงบิดความเร็วสูงกว่าสเต็ปเปอร์วงเปิด การใช้งานทั่วไปในโอกาส 0-1500 รอบต่อนาที
โดยสรุป: สเต็ปเปอร์มอเตอร์วงปิดที่มีต้นทุนต่ำ, ประสิทธิภาพสูง, ไม่กระวนกระวายใจ, ไม่หยุดการสั่นสะเทือนขนาดเล็ก, ความแข็งแกร่งสูง, ไม่ต้องแก้ไข, ความเร็วสูง, การตอบสนองแบบไดนามิกสูง ฯลฯ เป็นการแทนที่ระบบเซอร์โวที่มีต้นทุนสูง ระบบสเต็ปเปอร์ลูปเปิดระดับล่างและโซลูชั่นอื่นๆ ที่คุ้มค่า
13. Servo motor - General servo motor
เซอร์โวมอเตอร์ (เซอร์โวมอเตอร์) เรียกอีกอย่างว่ามอเตอร์แอคทูเอเตอร์ สามารถควบคุมความเร็ว ความแม่นยำของตำแหน่งได้อย่างแม่นยำมาก สามารถแปลงสัญญาณแรงดันไฟฟ้าเป็นแรงบิดและความเร็วเพื่อขับเคลื่อนวัตถุควบคุม
เซอร์โวมอเตอร์เป็นมอเตอร์กระแสตรงมาตรฐานหรือมอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับ ซึ่งแตกต่างจากโครงสร้างหลักของสเต็ปเปอร์มอเตอร์ เนื่องจากวงจรควบคุมถูกติดตั้งไว้ด้านนอกมอเตอร์ และวางชิ้นส่วนมอเตอร์ไว้ด้านใน
เซอร์โวมอเตอร์อาศัยพัลส์ในการระบุตำแหน่ง เมื่อเซอร์โวมอเตอร์ได้รับ 1 พัลส์ มันจะหมุนเป็นมุมที่สอดคล้องกับ 1 พัลส์
ทุกครั้งที่มอเตอร์หมุนเป็นมุม ตัวเข้ารหัสจะส่งพัลส์ป้อนกลับตามจำนวนที่สอดคล้องกัน พัลส์ป้อนกลับและพัลส์ที่ได้รับจากไดรเวอร์เซอร์โวจะสร้างการควบคุมวงปิด เพื่อให้ไดรเวอร์เซอร์โวสามารถควบคุมการหมุนของมอเตอร์ได้อย่างแม่นยำมากเพื่อให้ได้ตำแหน่งที่แม่นยำ
การควบคุมเซอร์โวมอเตอร์: โดยทั่วไป เซอร์โวมอเตอร์สำหรับใช้ในอุตสาหกรรมจะถูกควบคุมโดยลูปสามลูป ได้แก่ ลูปปัจจุบัน ลูปความเร็ว และลูปตำแหน่ง ซึ่งสามารถป้อนกลับความเร่งเชิงมุม ความเร็วเชิงมุม และตำแหน่งการหมุนของการทำงานของมอเตอร์ตามลำดับ
ชิปจะควบคุมกระแสขับเคลื่อนของแต่ละเฟสของมอเตอร์ผ่านฟีดแบ็คของทั้งสาม เพื่อให้ความเร็วและตำแหน่งของมอเตอร์ทำงานได้อย่างแม่นยำตามกำหนด
AC เซอร์โวมีคุณสมบัติของแรงบิดคงที่ภายใต้ความเร็วที่กำหนด ทั่วไป 200W, 400W ความเฉื่อยต่ำและปานกลาง ความเร็ว AC เซอร์โวจัดอันดับคือ 3000rpm ความเร็วสูงสุดคือ 5000rpm ความเร็วสูง
แรงบิดเป็นสัดส่วนกับกระแสไฟฟ้า ดังนั้นจึงสามารถทำงานในโหมดแรงบิดได้ เช่น การขันสกรู การกดขั้ว และโอกาสอื่นๆ ที่ต้องการแรงบิดคงที่
เสียงการทำงานของเซอร์โว AC และการสั่นสะเทือนมีขนาดเล็กมาก เกิดความร้อนต่ำ
ความเฉื่อยของมอเตอร์ในปริมาณที่เท่ากัน ความเฉื่อยของโรเตอร์มีขนาดเล็ก ความเฉื่อยเซอร์โว 400W เทียบเท่ากับความเฉื่อยของโรเตอร์ของสเต็ปเปอร์มอเตอร์ 57 ฐาน 2NM เท่านั้น
เซอร์โวมีความสามารถในการโอเวอร์โหลดในช่วงเวลาสั้น ๆ การเลือกจำเป็นต้องพิจารณาตัวคูณโอเวอร์โหลดของมอเตอร์เมื่อเร่งความเร็วและชะลอความเร็ว
เซอร์โวใช้การควบคุมวงปิดและมีข้อผิดพลาดในการติดตามตำแหน่งเดียวกันกับสเต็ปเปอร์วงปิด
Servo ต้องมีการว่าจ้างก่อนใช้งาน
แรงบิดเดิมของสเต็ปเปอร์และเซอร์โวมอเตอร์ไม่เพียงพอ บ่อยครั้งที่จำเป็นต้องทำงานร่วมกับตัวลด คุณสามารถใช้ชุดเฟืองทดหรือตัวลดดาวเคราะห์ได้
6. Servo motor - servo
เซอร์โวเป็นคลาสของเซอร์โวมอเตอร์กระแสตรง ซึ่งใช้ครั้งแรกกับโมเดลเครื่องบินขนาดเล็ก และปัจจุบันใช้สำหรับข้อต่อของหุ่นยนต์ขนาดเล็ก
จากการวิเคราะห์โครงสร้าง เซอร์โวประกอบด้วยมอเตอร์ไฟฟ้ากระแสตรงขนาดเล็ก บวกกับเซ็นเซอร์ ชิปควบคุม และชุดเฟืองทดรอบ ซึ่งติดตั้งเข้ากับตัวเรือนในตัว
สามารถควบคุมมุมการหมุนผ่านสัญญาณอินพุต (โดยปกติจะเป็นสัญญาณ PWM แต่ก็เป็นสัญญาณดิจิตอลด้วย)
เนื่องจากเป็นเวอร์ชันที่เรียบง่าย การควบคุมเซอร์โวมอเตอร์แบบสามลูปดั้งเดิมจึงง่ายขึ้นเป็นหนึ่งลูป กล่าวคือ ตรวจพบเฉพาะลูปตำแหน่งเท่านั้น
โซลูชันราคาถูกคือโพเทนชิออมิเตอร์ซึ่งตรวจพบโดยตัวต้านทาน ในขณะที่โซลูชันขั้นสูงจะใช้เซ็นเซอร์ Hall หรือตัวเข้ารหัส
เซอร์โวทั่วไปมีราคาไม่แพงและกะทัดรัด แต่มีความแม่นยำต่ำมากและความสามารถในการสงบตำแหน่งต่ำ และสามารถตอบสนองความต้องการระดับล่างได้หลายอย่าง
ด้วยความนิยมของหุ่นยนต์ขนาดเล็กระดับผู้บริโภคในช่วงสองปีที่ผ่านมา เซอร์โวขนาดเล็กและน้ำหนักเบาจึงกลายเป็นส่วนประกอบข้อต่อที่เหมาะสมที่สุดในทันที
อย่างไรก็ตาม ข้อต่อของหุ่นยนต์ต้องการประสิทธิภาพที่สูงกว่าเซอร์โวกลางอากาศมาก และในฐานะผลิตภัณฑ์เชิงพาณิชย์ยังต้องการเซอร์โวคุณภาพสูงกว่าเครื่องเล่น DIY มาก
ยินดีต้อนรับสู่แบ่งปันข้อมูลเพิ่มเติมเกี่ยวกับมอเตอร์ไฟฟ้าในพื้นที่แสดงความคิดเห็น!
หากมีข้อสงสัยเกี่ยวกับมอเตอร์ไฟฟ้า โปรดติดต่อช่างไฟฟ้ามืออาชีพ ผู้ผลิต ใน จีน ดังนี้
Dongchun motor มีมอเตอร์ไฟฟ้าหลากหลายประเภทที่ใช้ในอุตสาหกรรมต่างๆ เช่น การขนส่ง โครงสร้างพื้นฐาน และการก่อสร้าง
รับคำตอบที่รวดเร็ว






