 перейти к содержанию
перейти к содержанию В чем разница между бесщеточным двигателем и коллекторным двигателем?
В чем разница между синхронным двигателем и асинхронным двигателем?
Как насчет асинхронного двигателя с фазным ротором?
Все ли серводвигатели являются двигателями переменного тока?
Все ли серводвигатели являются синхронными двигателями?
Шаговые двигатели относятся к двигателям постоянного или переменного тока?
Является ли серводвигатель серводвигателем? ......
Мудрецы однажды сказали: Если знание не систематично, в чем разница между ним и абзацем?
Но мудрая книга с этим многословным текстом, этой причудливой терминологией, этим правдоподобным объяснением действительно смотрит на людей в облаках.
Я также долго искал в Интернете, не нашел более систематического объяснения устройства электродвигателей и принципа классификации, поэтому на поиск и систематизацию копии ушло много усилий.
В этой статье делается попытка объяснить систематические знания простым языком и используется много анимации и изображений, чтобы ярко выразить малоизвестные знания.
Из-за моих ограниченных знаний неизбежно наличие большого количества ошибок, пожалуйста, поправьте экспертов, пожалуйста, не стесняйтесь давать советы.
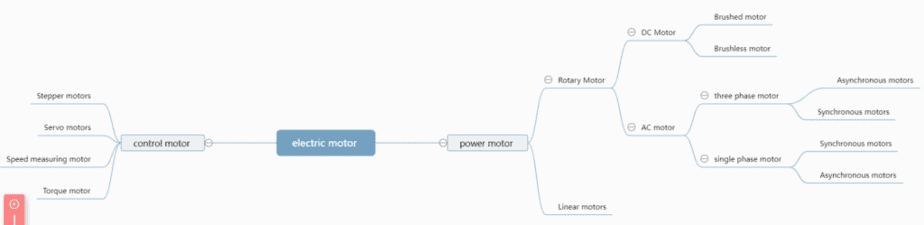
1. схема, поясняющая основные типы электродвигателей.
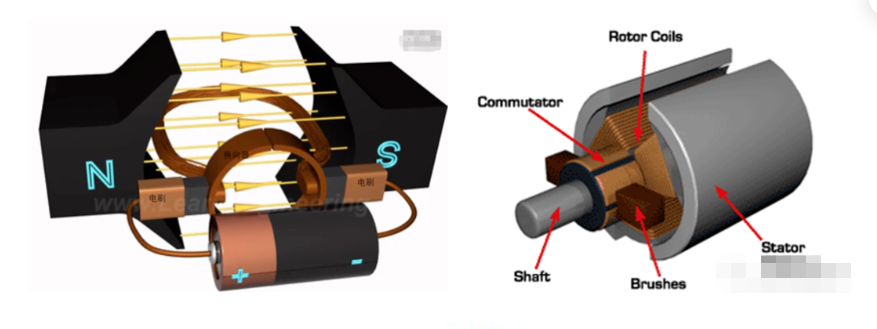
2. Электродвигатель постоянного тока – щеточный двигатель.
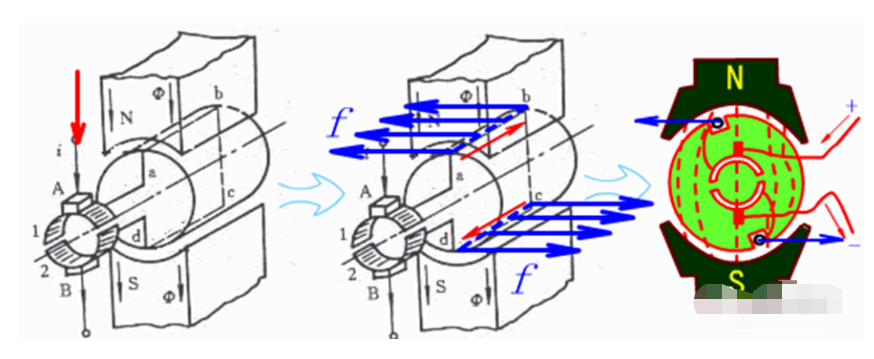
Прочтите физику средней школы, которую знают хулиганы, чтобы изучить находящийся под напряжением проводник в силе магнитного поля этой штуки, мы тренировали левую руку в сломанной ладони, что и является принципом асинхронного двигателя постоянного тока.
Все электродвигатели состоят из статора и ротора, в электродвигателях постоянного тока, чтобы заставить ротор вращаться, нужно постоянно менять направление тока, иначе ротор сможет провернуться только на пол-оборота, это как педаль велосипеда. .
Вот почему двигателям постоянного тока нужны коллекторы.
Вообще говоря, коллекторные двигатели постоянного тока включают коллекторные и бесщеточные двигатели.
Щеточный двигатель также называют асинхронным двигателем постоянного тока или двигателем с угольной щеткой, часто называемым щеточным двигателем постоянного тока.
Он использует механическую коммутацию, внешний полюс не перемещает внутреннюю катушку (якорь), коллектор и катушка ротора вращаются вместе, щетки и магниты не движутся, поэтому трение коллектора и щетки завершает переключение направления тока.
Недостатки щеточного двигателя.
1, механическая коммутация искр, генерируемых коллектором и трением щетки, электромагнитные помехи, высокий уровень шума, короткий срок службы.
2, низкая надежность, множество отказов, требующих частого обслуживания.
3, из-за наличия коммутатора, ограничивающего инерцию ротора, ограничивающего максимальную скорость, влияющего на динамические характеристики.
Поскольку у него так много недостатков, он до сих пор широко используется: он имеет высокий крутящий момент, простую конструкцию, простоту обслуживания (т. е. замену угольных щеток), дешевизну.
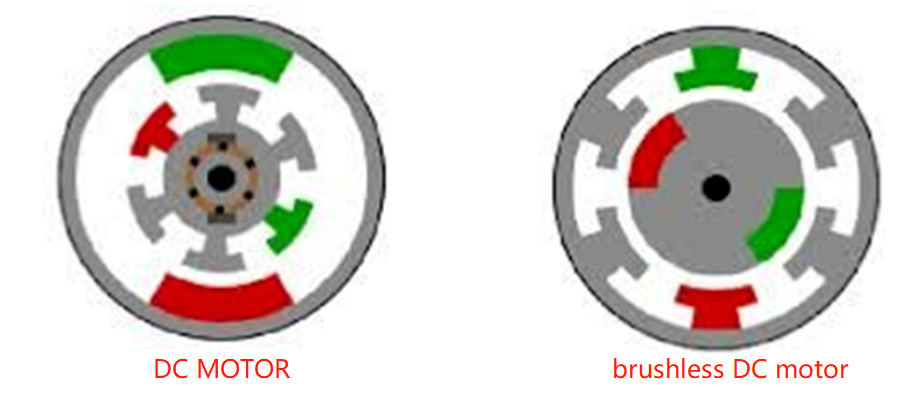
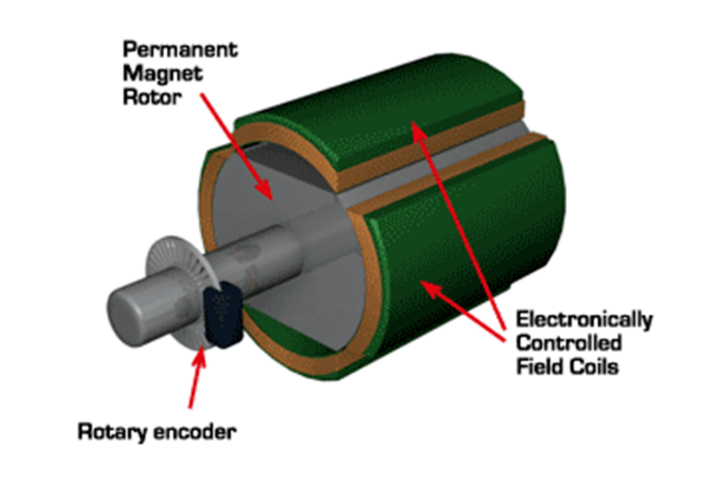
2. Двигатели постоянного тока – бесщеточные двигатели.
Бесщеточный двигатель в некоторых областях также называют инверторным двигателем постоянного тока (BLDC), он использует электронную коммутацию (датчик Холла), катушка (якорь) не перемещается, магнитные полюса перемещаются, тогда постоянный магнит может находиться снаружи катушки или внутри катушки. Таким образом, существует бесщеточный двигатель с внешним ротором и бесщеточный двигатель с внутренним ротором.
Бесщеточные двигатели устроены так же, как синхронные двигатели с постоянными магнитами.
Однако один бесщеточный двигатель не является полноценной энергосистемой. Бесщеточный режим в основном должен управляться бесщеточным контроллером, также известным как ESC, для обеспечения непрерывной работы.
Именно бесщеточный электронный регулятор (ESC) действительно определяет его производительность.
Обычно существует два типа управляющих токов для бесщеточных двигателей: один — прямоугольный, а другой — синусоидальный.
Иногда первый называют бесщеточным двигателем постоянного тока, а второй — серводвигателем переменного тока, который представляет собой разновидность серводвигателя переменного тока.
Бесщеточные двигатели работают по-разному, их можно разделить на бесщеточные двигатели с внутренним ротором и бесщеточные двигатели с внешним ротором.
Внутренний ротор трехфазный, что дороже.
Внешний ротор обычно используется в однофазном режиме, цена массового производства близка к двигателю с угольной щеткой, поэтому в последние годы он широко используется.
Цена внешнего трехфазного ротора близка к цене внутреннего ротора.
Ну и как вы можете догадаться, недостаток щеточных двигателей – это суть бесщеточных двигателей.
Он обладает высокой эффективностью, низким энергопотреблением, низким уровнем шума, длительным сроком службы, высокой надежностью, сервоуправлением, плавной скоростью преобразования частоты (вплоть до очень высокой скорости) и другими преимуществами.
Он относительно меньше, чем щеточный двигатель постоянного тока, управление проще, чем у асинхронного двигателя переменного тока, пусковой момент имеет большую перегрузочную способность, а недостатки ...... дороже, чем щетка, плохое обслуживание.
2. Двигатель постоянного тока – принцип регулирования скорости.
Регулирование скорости асинхронного двигателя постоянного тока: так называемое регулирование скорости, то есть путем регулировки скорости двигателя для получения необходимого крутящего момента.
Двигатель постоянного тока с постоянным магнитом путем регулировки напряжения, последовательного сопротивления, изменения скорости возбуждения, но фактическая регулировка напряжения является наиболее удобной и наиболее часто используемой, основное использование регулирования скорости ШИМ.
ШИМ на самом деле осуществляется через высокоскоростной переключатель для достижения регулирования напряжения постоянного тока, цикл, открытое долгое время, среднее напряжение высокое, длительное время выключения, среднее напряжение низкое, очень удобно регулировать, пока переключатель скорость. Пока скорость переключения достаточно высока, гармоники в сети уменьшаются, а ток становится более продолжительным.
Однако щетки и коллектор изнашиваются в течение длительного времени, и в то же время во время коммутации происходит огромное изменение тока, из-за чего очень легко возникают искры.
Коллектор и щетки ограничивают мощность и скорость асинхронного двигателя постоянного тока, что затрудняет регулирование скорости асинхронного двигателя постоянного тока.
Для бесщеточного асинхронного двигателя постоянного тока регулятор скорости контролирует только входное напряжение на поверхности.
Но система саморегулирования частоты двигателя (сам бесщеточный двигатель постоянного тока оснащен детектором положения ротора и другим устройством получения сигнала положения ротора, использующим сигнал положения ротора этого устройства для управления моментом изменения фазы устройства регулирования частоты переменного напряжения) автоматически контролирует частота в зависимости от переменного напряжения, которая почти такая же, как у двигателя постоянного тока (щеточный), очень удобна. Очень удобно.
Поскольку в роторе используются постоянные магниты, нет специальной обмотки возбуждения, при той же мощности двигатель меньше, легче, эффективнее, компактнее, более надежен в работе, имеет лучшие динамические характеристики, в приводе электромобилей и в других аспектах. были широко использованы.
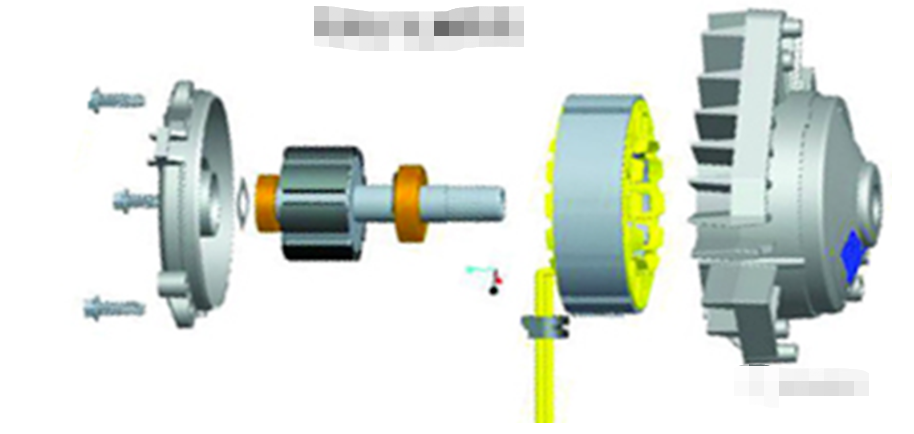
3. Двигатели трехфазного переменного тока – асинхронные двигатели.
Двигатели переменного тока делятся на синхронные и асинхронные двигатели, синхронные двигатели в основном используются в генераторах, а асинхронные двигатели в основном используются в электродвигателях. Это асинхронный двигатель с короткозамкнутым ротором.
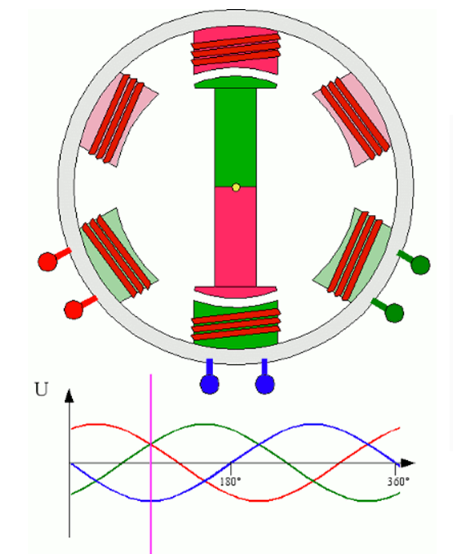
Корпус двигателя представляет собой статор, на статоре расположены три симметричные обмотки переменного тока.
При изменении последовательности трех фаз формируется вращающееся синтетическое магнитное поле, а скорость вращения магнитного поля является синхронной скоростью.
Синхронная скорость n=60f/p, f — частота, p — количество пар полюсов, например, для 2-полюсного двигателя, подключенного к национальной сети 50 Гц (т.е. количество пар полюсов равно 1 паре), тогда скорость n=60*50/1=3000об/мин.
Аналогично, синхронная скорость 4-полюсных, 6-полюсных и 8-полюсных двигателей составляет 1500, 1000 и 750.
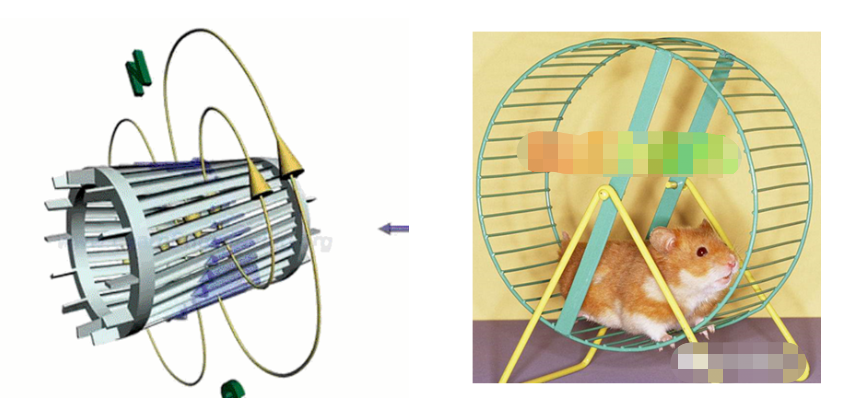
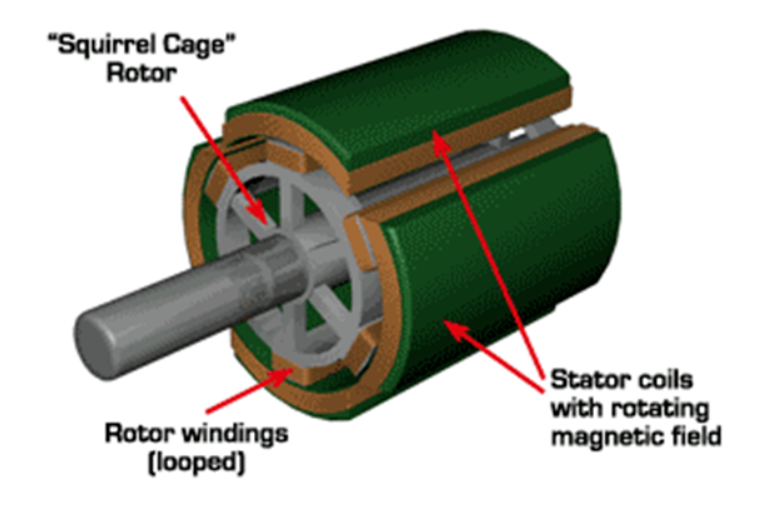
Асинхронные двигатели имеют простой механизм с замкнутым ротором, например, типа «беличья клетка».
Катушка ротора отсекает вращающееся магнитное поле, создавая индуцированный электрический потенциал, который, в свою очередь, генерирует индуцированный ток и, наконец, вращающееся магнитное поле.
Чтобы ротор стал электромагнитом и следовал вращению магнитного поля статора, скорость ротора должна быть равна < вращающееся магнитное поле статора, чтобы перерезать линии магнитной индукции.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
То есть асинхронная скорость ротора <синхронная скорость, существует разница скоростей между магнитным полем ротора и статора, поэтому его называют асинхронным двигателем.
Номинальная скорость асинхронного двигателя незначительно варьируется от производителя к производителю: около 2800+ об/мин для 2-полюсного двигателя, 1400+, 950+,700+ для 4-полюсного, 6-полюсного и 8-полюсного асинхронного двигателя.
Скорость асинхронного двигателя высока при отсутствии нагрузки и снижается при наличии нагрузки.
Асинхронный двигатель имеет простую конструкцию, простоту обслуживания, надежную работу и низкую цену, поэтому он широко используется.
4. Двигатели трехфазного переменного тока - синхронные двигатели.
Синхронный двигатель.
Если вы позволите скорости вращения магнитного поля статора, он становится синхронным двигателем, в настоящее время необходимо превратить статор в электромагнит или постоянный магнит, то есть для заряда статора, в это время больше не нужно Чтобы разрезать магнитную индукционную линию, может вращаться, скорость вращения и скорость вращения магнитного поля одинаковы, то есть образование синхронного двигателя.
Синхронная структура ротора двигателя является более сложной, чем асинхронные двигатели, высокие цены, в срок службы производства не так широко используется, как асинхронные двигатели, в основном используемые, как генераторы, в настоящее время термические электростанции, гидроэлектроэлектрические станции, паровые турбины, гидравлические турбины - это в основном синхронные двигатели.
5. Трехфазный двигатель переменного тока - регулирование скорости асинхронных электродвигателей.
Регулирование скорости асинхронного двигателя: теоретически управление асинхронным двигателем частотой переменного тока, напряжением или сопротивлением ротора, распределением полюсов двигателя может быть регулированием скорости, но на практике для достижения бесконечного регулирования скорости используется метод регулировки частоты и напряжения.
Поскольку диапазон регулирования напряжения невелик, его обычно можно использовать только в случаях, когда требования к регулированию скорости невелики, применение не получило широкого распространения.
Регулирование скорости с переменной частотой: Говоря о частоте, мы, возможно, слышали о ней.
Полное название преобразования частоты — переменное напряжение, переменная частота (VVVF), что означает, что напряжение изменяется при изменении частоты, поэтому диапазон скоростей асинхронного двигателя достаточно велик.
Частотные преобразователи могут быть разделены на две широкие категории: преобразователи частоты AC-AC и преобразователи частоты AC-DC.
Инвертор AC-DC: мощность переменного тока напрямую преобразуется в мощность переменного тока другой частоты с помощью электроники.
Максимальная выходная частота не может превышать половину входной частоты, поэтому она обычно используется только в системах низкой скорости, высокой емкости и может устранить необходимость в огромном редукторе передачи.
Инвертор AC-DC сначала исправят мощность переменного тока в постоянный ток, а затем превратит ее в AC с контролируемой частотой и напряжением через инвертор, с технологией ШИМ, этот вид инвертора может реализовать широкий диапазон переменного напряжения и частоты.
В электромобилях асинхронный двигатель долговечен, имеет высокую перегрузочную способность, а алгоритм управления настолько продуман, что его можно использовать полностью.
6. Трехфазный двигатель переменного тока – регулирование скорости синхронного двигателя.
Синхронное регулирование скорости двигателя:
Синхронные машины не имеют диапазона регулирования, а управляющее напряжение не может изменять скорость при определении структуры, поэтому до появления преобразователей частоты синхронные двигатели были совершенно нерегулируемыми.
Появление преобразователя частоты делает синхронный двигатель переменного тока также имеющим огромный диапазон регулирования скорости, поскольку его ротор также имеет независимое возбуждение (постоянный магнит или электрическое возбуждение), его диапазон регулирования скорости шире, чем у асинхронного двигателя, а синхронный двигатель имеет получили новую жизнь.
Систему управления скоростью и частотой переменного напряжения синхронного двигателя можно разделить на систему регулирования скорости с другим управлением и систему регулирования скорости с саморегулированием.
Для регулирования скорости с переменной частотой и другим управлением оно аналогично регулированию переменной частоты асинхронного двигателя, которым можно управлять с помощью SVPWM и других методов управления в соответствии с его математической моделью, и его производительность лучше, чем у обычного асинхронного двигателя переменного тока.
Синхронный двигатель с самоуправляемым инвертором в процессе разработки имел различные названия, например, бесколлекторный двигатель; при использовании постоянных магнитов и вводе трехфазной синусоидальной волны его можно назвать синхронным двигателем с синусоидальным постоянным магнитом; и если вводить прямоугольную волну, то это можно назвать синхронным двигателем с трапецеидальной волной и постоянными магнитами, да, он похож на ранее упомянутую бесщеточную машину постоянного тока (BLDM), мы не чувствуем, что большой круг рэпа повернул назад, но вы теперь необходимо иметь более глубокое понимание переменной скорости, поэтому бесщеточный двигатель постоянного тока при использовании входа постоянного тока, но использование технологии преобразования частоты синхронного двигателя (та же структура, что и синхронный двигатель с постоянными магнитами), в модели 3 об использовании бесщеточного двигателя постоянного тока .
7. Однофазный асинхронный двигатель переменного тока - однофазный двигатель переменного тока последовательного возбуждения (щеточный).
В однофазном двигателе переменного тока с последовательным возбуждением, широко известном как двигатель с последовательным возбуждением или универсальный двигатель (иностранное название UniversalMotor, названное из-за универсального переменного и постоянного тока), обмотка якоря и обмотка возбуждения соединены последовательно для совместной работы.
Однофазный двигатель с последовательным возбуждением также называется двигателем с последовательным возбуждением переменного и постоянного тока двойного назначения, который может работать как с переменным, так и с постоянным током.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Преимущества однофазного двигателя с последовательным возбуждением заключаются в том, что он имеет высокую скорость, высокий пусковой момент, небольшой размер, легкий вес, его нелегко блокировать вращение, широкий диапазон применимого напряжения и возможность регулирования скорости с помощью метода регулирования напряжения. , что просто и легко реализовать.
Поэтому он широко используется в электроинструментах, таких как угловые шлифовальные машины, ручные дрели и т. д.
Конструкция однофазного двигателя с последовательным возбуждением очень похожа на структуру двигателя постоянного тока с последовательным возбуждением, основное отличие состоит в том, что сердечник статора однофазного двигателя с последовательным возбуждением должен быть изготовлен из ламинированной кремниевой стали, а магнитные полюса ДК могут быть изготовлены как ламинированной, так и цельной конструкции.
Регулирование скорости однофазного двигателя с последовательным возбуждением, большинство методов, используемых для регулировки напряжения, заключается в изменении электрического потенциала.
Метод регулирования напряжения однофазного двигателя с последовательным возбуждением использует управляемое регулирование напряжения сдвига фазы, при котором напряжение запуска тиристора отстает от входного напряжения для достижения триггера сдвига фазы входного напряжения.
В реализации существуют аппаратные и программные методы.
Метод регулируемого напряжения с использованием технологии управления скоростью с кремниевым управлением имеет простую линию, небольшой размер компонентов и другие характеристики простого и эффективного метода с кремниевым управлением.
(а) кривая изменения переменного тока;
(б) Направление вращения ротора, когда ток имеет положительную полуволну.
(в) Направление вращения ротора, когда ток имеет отрицательную полуволну.

8. Двигатель асинхронный однофазный переменного тока - однофазный двигатель переменного тока с короткозамкнутым ротором (бесщеточный).
Однофазный ток через обмотку якоря создает пульсирующее магнитное поле, а не вращающееся магнитное поле, поэтому однофазные асинхронные двигатели не могут запускаться самостоятельно.
Чтобы решить проблему запуска, однофазные асинхронные двигатели переменного тока часто делают двухфазными.
Основная обмотка питается напрямую от однофазного источника питания; вторичная обмотка пространственно отличается от основной обмотки на 90° (электрический угол, равный механическому углу, делённому на число пар полюсов двигателя).
Вторичную обмотку подключают к однофазному источнику переменного тока после последовательного соединения конденсатора или резистора так, чтобы ток, проходящий через нее, и ток в основной обмотке имели определенную разность фаз.
Это делает синтетическое магнитное поле эллиптическим вращающимся полем или, возможно, даже близким к круговому вращающемуся полю.
Таким образом, двигатель получает пусковой момент.
Двигатель, использующий метод резистивного разделения фаз, является недорогим, например, вторичная обмотка может быть намотана более тонким проводом, но эффект разделения фаз будет плохим, и энергия будет потребляться в сопротивлении.
После запуска двигателя и достижения определенной скорости вторичная обмотка обычно автоматически снимается с помощью центробежного переключателя, установленного на валу двигателя, чтобы уменьшить резистивные потери и повысить эффективность работы.
Обычно он используется в тех случаях, когда требования к пусковому крутящему моменту невелики, например, на небольших токарных станках, небольших холодильниках и т. д. Недостаток заключается в том, что скорость невозможно регулировать.
Можно сделать синтетическое магнитное поле двигателя близким к круговому вращающемуся магнитному полю в определенной рабочей точке двигателя, чтобы получить лучшие рабочие характеристики.
Чтобы асинхронный двигатель с расщепленной фазой имел лучшие пусковые характеристики или лучшие рабочие характеристики или и то, и другое, необходимая емкость (величина значения) различна и может быть разделена на три вида.
9. шаговые двигатели – шаговые двигатели с разомкнутым контуром.
Шаговые двигатели (с разомкнутым контуром) представляют собой управляемые двигатели с разомкнутым контуром, которые преобразуют электрические импульсные сигналы в угловые смещения и чрезвычайно широко используются.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Количество импульсов можно контролировать, чтобы контролировать величину углового смещения и достигать цели точного позиционирования; в то же время можно контролировать частоту импульсов, чтобы контролировать скорость и ускорение вращения двигателя, чтобы достичь цели регулирования скорости.
Шаговый двигатель — это разновидность асинхронного двигателя, который работает с использованием электронной схемы, то есть драйвера, для преобразования энергии постоянного тока в многофазный ток управления синхронизацией с разделением времени.
Хотя шаговые двигатели питаются от постоянного тока, их нельзя понимать как двигатели постоянного тока, которые представляют собой силовые двигатели, преобразующие электрическую энергию постоянного тока в механическую энергию, тогда как шаговые двигатели представляют собой двигатели с разомкнутым контуром управления, которые преобразуют электрические импульсные сигналы в угловое смещение.
10. Сравнение шагового двигателя и шагового сервопривода
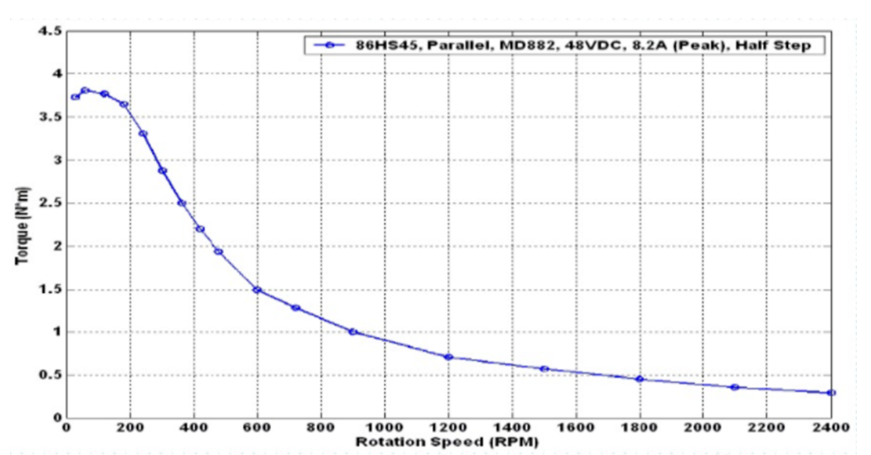
Обратите внимание, что шаговые двигатели используются в низкоскоростных приложениях - не более 1000 об/мин в минуту, лучший рабочий диапазон - 150 ~ 500 об/мин (шаг с обратной связью до 1500).
2-фазный шаговый двигатель со скоростью 60–70 об/мин склонен к явлению резонанса на низкой скорости, создавая вибрацию и шум, которых следует избегать, изменяя передаточное отношение, увеличивая мелкую фракцию, добавляя магнитные демпферы и т. д.
Меры предосторожности по точности подразделения: когда уровень подразделения больше 4, точность угла шага не может быть гарантирована, высокие требования к точности, лучше всего переключиться на большее количество фаз (т. е. на меньший угол шага) шагового двигателя или замкнутый двигатель. шаговый двигатель, серводвигатель.
(Разомкнутый) шаговый двигатель и серводвигатель 7 разных.
Точность управления - точность управления серводвигателем может быть установлена в соответствии с энкодером, более высокая точность.
Б низкочастотные характеристики – шаговые двигатели склонны к вибрации на низких частотах, серводвигатели – нет.
Моментно-частотная характеристика C - крутящий момент шагового двигателя становится меньше с увеличением скорости, поэтому его максимальная рабочая скорость обычно находится в пределах <1000 об/мин, серводвигатель при номинальной скорости (обычно 3000 об/мин) может выдавать номинальный крутящий момент, при номинальной скорости выше постоянной выходной мощности, максимальная скорость до 5000 об/мин;.
Перегрузочная способность D - шаговый двигатель не может быть перегружен, максимальный крутящий момент серводвигателя может быть перегружен в 3 раза.
Режим работы E – шаговый двигатель при разомкнутом управлении, серводвигатель при замкнутом управлении.
Реакция скорости F - время запуска шагового двигателя 0,15 ~ 0,5 с, серводвигателя 0,05 ~ 0,1, самое быстрое время 0,01 с для достижения номинальной скорости 3000 об / мин.
Показатели эффективности G - КПД шагового двигателя около 60%, серводвигателя около 80%.
В реальном использовании обнаружится: серводвигатель дорогой, дорогой из многих, поэтому более широко используются синхронные двигатели, особенно в требованиях к точности позиционирования не очень высокая синхронная ременная передача, плоский ленточный конвейер и в других случаях часто используется шаговый двигатель.
11. Шаговые двигатели – шаговые двигатели замкнутого цикла.
Шаговые двигатели с замкнутым контуром. Помимо шаговых двигателей с разомкнутым контуром, существуют шаговые двигатели, у которых на конце двигателя добавлен энкодер, позволяющий осуществлять управление с обратной связью.
Управление шаговыми двигателями с обратной связью использует обратную связь по положению и/или скорости для определения фазовых переходов, соответствующих положению ротора, что может значительно улучшить производительность шаговых двигателей.
Сервосистемы без аномальных явлений.
Преимущества шаговых двигателей с обратной связью.
1. Высокая скорость отклика. По сравнению с костюмными двигателями, шаговые двигатели с замкнутым контуром очень точно следуют командам позиционирования, поэтому время позиционирования очень короткое. При частом запуске/остановке время позиционирования может быть значительно сокращено.
2. Создает больший крутящий момент, чем обычный сервопривод. Компенсируйте отсутствие потери шага и низкоскоростную вибрацию обычной шаговой системы.
3. Высокий крутящий момент может быть создан даже при 100% нагрузке, без потери ступенчатой работы, без учета потери крутящего момента и других проблем, таких как обычные шаговые системы.
4. Применяя привод с обратной связью, эффективность можно увеличить до 7,8 раз, выходную мощность можно увеличить до 3,3 раза, а скорость можно увеличить до 3,6 раза.
Он может обеспечить более высокую скорость работы, более стабильную и плавную скорость, чем управление с разомкнутым контуром.
5. Шаговый двигатель будет полностью неподвижен при остановке, без явления микровибрации, характерного для обычного сервопривода.
Он может заменить применение сервосистемы общего назначения, когда требуется низкая стоимость и высокая точность позиционирования.
12. Шаговый двигатель - сравнение шагового сервопривода с замкнутым контуром
Шаговые двигатели с замкнутым контуром автоматически регулируют величину тока обмотки в зависимости от размера нагрузки, тепло и вибрация меньше, чем у шаговых двигателей с разомкнутым контуром, имеется обратная связь с энкодером, поэтому точность выше, чем у обычных шаговых двигателей, реакция двигателя, чем у шаговых двигателей с разомкнутым контуром. Шаговые двигатели медленнее, чем серводвигатели быстрее, во время работы возникает ошибка положения, ошибка постепенно уменьшается через миллисекунды после остановки команды.
Высокоскоростной крутящий момент, чем у шагового двигателя с разомкнутым контуром, обычное применение при 0-1500 об/мин.
Вкратце: шаговый двигатель с обратной связью с низкой стоимостью, высокой эффективностью, отсутствием джиттера, отсутствием микровибрации без остановки, высокой жесткостью, отсутствием выпрямления, высокой скоростью, высокой динамической реакцией и т. д. является заменой дорогостоящих сервосистем, недорогие шаговые системы с открытым контуром и другие экономичные решения
13. Серводвигатель – Общий серводвигатель.
Серводвигатель (серводвигатель), также называемый приводным двигателем, может обеспечивать очень точную скорость управления, точность позиционирования, преобразовывать сигнал напряжения в крутящий момент и скорость для управления объектом управления.
В отличие от принципиальной конструкции шагового двигателя, серводвигатель представляет собой стандартный двигатель постоянного тока или асинхронный двигатель переменного тока, поскольку схема управления расположена снаружи двигателя, а часть двигателя — внутри.
Серводвигатель использует импульсы для позиционирования. Когда серводвигатель получает 1 импульс, он поворачивается на угол, соответствующий 1 импульсу.
Каждый раз, когда двигатель поворачивает угол, энкодер отправляет соответствующее количество импульсов обратной связи. Импульсы обратной связи и импульсы, получаемые сервоприводом, образуют управление с обратной связью, так что сервопривод может очень точно управлять вращением двигателя для достижения точного позиционирования.
Управление серводвигателем: Как правило, серводвигатели для промышленного использования управляются тремя контурами, а именно токовым контуром, контуром скорости и контуром положения, которые могут отслеживать угловое ускорение, угловую скорость и вращательное положение двигателя соответственно.
Чип контролирует ток возбуждения каждой фазы двигателя посредством обратной связи трех фаз, так что скорость и положение двигателя могут работать точно по расписанию.
Сервопривод переменного тока имеет функцию постоянного крутящего момента при номинальной скорости, обычная мощность 200 Вт, 400 Вт с низкой и средней инерцией, номинальная скорость сервопривода переменного тока составляет 3000 об/мин, максимальная скорость - 5000 об/мин, высокая скорость.
Крутящий момент пропорционален току, поэтому он может работать в режиме крутящего момента, например, при запирании винтов, нажатии клемм и в других случаях, когда требуется постоянный крутящий момент.
Шум и вибрация сервопривода переменного тока очень малы, низкое выделение тепла.
Тот же объем инерции двигателя, инерция ротора невелика, инерция сервопривода мощностью 400 Вт эквивалентна только инерции ротора шагового двигателя 57 Base 2NM.
Сервопривод имеет кратковременную перегрузочную способность, при выборе необходимо учитывать множитель перегрузки двигателя при ускорении и замедлении.
Сервопривод использует управление с обратной связью и имеет ту же ошибку отслеживания положения, что и шаговый двигатель с обратной связью.
Перед использованием сервопривод требует ввода в эксплуатацию.
Исходного крутящего момента шагового и серводвигателя недостаточно, часто приходится работать с редуктором, можно использовать редуктор или планетарный редуктор.
6. Серводвигатель – сервопривод
Сервопривод — это класс серводвигателей постоянного тока, который сначала использовался для небольших моделей самолетов, а теперь используется для небольших соединений роботов.
Судя по структурному анализу, сервопривод состоит из небольшого двигателя постоянного тока, а также датчиков, управляющих микросхем и редукторов, которые смонтированы в интегрированном корпусе.
Он способен управлять углом поворота посредством входного сигнала (обычно сигнала ШИМ, но также и цифрового сигнала).
Поскольку это упрощенная версия, исходное трехконтурное управление серводвигателем упрощено до одного контура, т. е. обнаруживается только контур положения.
Дешевым решением является потенциометр, который обнаруживается резистором, а более продвинутое решение будет использовать датчик Холла или энкодер.
Сервоприводы общего назначения недороги и компактны, но имеют очень низкую точность и плохую способность стабилизации положения и могут удовлетворить многие потребности низкого уровня.
Благодаря буму небольших роботов потребительского уровня за последние два года, небольшие и легкие сервоприводы мгновенно стали наиболее подходящими компонентами суставов.
Однако суставы роботов требуют гораздо более высокой производительности, чем воздушные сервоприводы, а в качестве коммерческого продукта также требуются сервоприводы гораздо более высокого качества, чем для самодельных плееров.
Добро пожаловать, чтобы поделиться с нами дополнительной информацией об электродвигателях в комментариях!
Любой запрос об электродвигателе, пожалуйста, свяжитесь с профессиональным электродвигателем. производитель в Китай следующее:
Dongchun Motor предлагает широкий ассортимент электродвигателей, которые используются в различных отраслях, таких как транспорт, инфраструктура и строительство.
Получите оперативный ответ.






