O motor elétrico é um dispositivo que converte energia elétrica em energia mecânica através da ação eletromagnética.
Pela forma de energia elétrica, os motores podem ser divididos em duas categorias: motores CA e motores CC.
Entre eles, os motores CA podem ser divididos em motores CA monofásicos e motores CA trifásicos. De acordo com a diferença na taxa de rotação, de acordo com o princípio de classificação, o motor também pode ser dividido em motores síncronos e motores assíncronos.
Os motores síncronos podem ser divididos em motores síncronos de ímã permanente, motores síncronos de histerese e motores síncronos de relutância de acordo com os diferentes campos magnéticos.
Os motores assíncronos, por outro lado, não estão disponíveis apenas na forma de indução, mas também na forma de comutador CA.
A forma de indução pode ser dividida em motores assíncronos trifásicos e motores assíncronos de pólo sombreado. Além disso, de acordo com o tipo de proteção, o motor também pode ser dividido em fechado, aberto, à prova d'água, submersível, estanque e à prova de explosão.
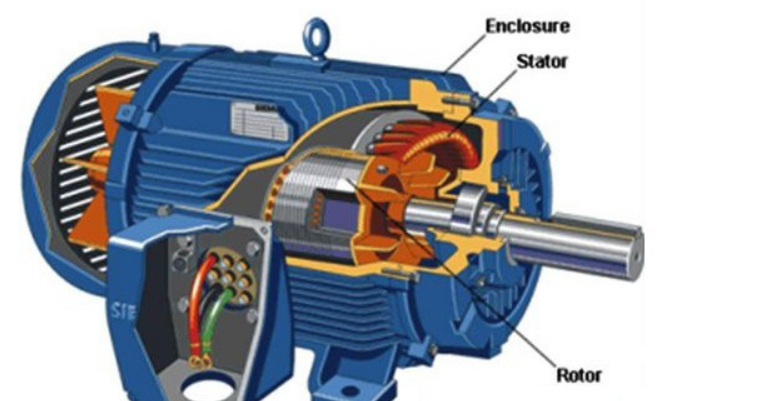
O motor elétrico é uma parte importante do sistema de transmissão e controle, que é um dispositivo eletromagnético para realizar a conversão ou transmissão de energia elétrica de acordo com a lei da indução eletromagnética, o papel principal é gerar torque de acionamento, como fonte de energia elétrica aparelhos ou várias máquinas, e converter energia elétrica em energia mecânica.
Com o desenvolvimento da ciência e tecnologia modernas, o foco dos motores em aplicações práticas começou a mudar da transmissão simples no passado para o controle complexo, especialmente para o controle preciso da velocidade, posição e torque do motor.
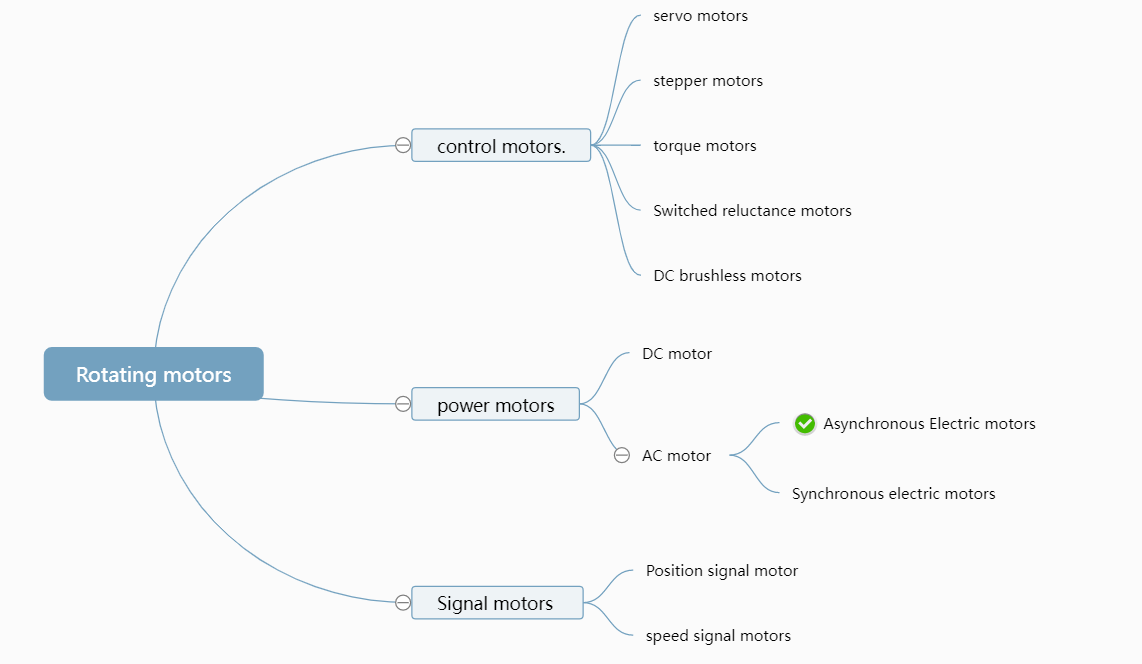
However, motors will have different designs and drive methods according to different applications. According to the uses of rotating motors, the following basic classification is made, and we mainly introduce the most representative, common and basic motors in motors - control motors, power motors and signal motors.
Control motors are mainly used for precise speed and position control, and as "actuators" in control systems. They can be divided into servo motors, stepper motors, torque motors, switched reluctance motors, brushless DC motors and other categories.
Servo Motors
O primeiro servo motor é um motor DC geral, e somente quando a precisão do controle não é alta, o motor DC geral é usado como servo motor. O servo motor DC atual é um motor DC de pequena potência em termos de estrutura, e sua excitação adota principalmente controle de armadura e controle de campo magnético, mas geralmente adota controle de armadura.
Os servo motores são amplamente utilizados em vários sistemas de controle, principalmente em vários sistemas de controle de movimento, especialmente em sistemas follow-me. Ele pode converter o sinal de tensão de entrada na saída mecânica no eixo do motor e arrastar o elemento controlado para atingir o objetivo de controle. Em geral, o servo motor requer que a velocidade do motor seja controlada pelo sinal de tensão adicionado, a velocidade pode mudar continuamente com a mudança do sinal de tensão adicionado, o torque pode ser controlado pela saída de corrente do controlador e o motor deve refletir rápido, ser pequeno em tamanho e ter pequeno poder de controle.
motor de passo
O chamado motor de passo é um atuador que converte pulsos elétricos em deslocamento angular. Ou seja, quando o driver de passo recebe um sinal de pulso, ele aciona o motor de passo para girar um ângulo fixo na direção definida.
Podemos controlar o deslocamento angular do motor controlando o número de pulsos, de modo a atingir o objetivo de posicionamento preciso.
Ao mesmo tempo, também podemos controlar a velocidade e a aceleração da rotação do motor controlando a frequência do pulso, de modo a atingir o objetivo de regulação da velocidade. Atualmente, os motores de passo mais comumente usados incluem motores de passo reativos (VR), motores de passo de ímã permanente (PM), motores de passo híbridos (HB) e motores de passo monofásicos.
A diferença entre os motores de passo e os motores comuns reside principalmente em sua forma acionada por pulso, de modo que os motores de passo podem ser combinados com a moderna tecnologia de controle digital e possuem as características de estrutura simples, alta confiabilidade e baixo custo.
Mas os motores de passo na precisão de controle, faixa de mudança de velocidade, desempenho de baixa velocidade são inferiores ao controle de circuito fechado tradicional de servomotores DC, então motores de passo são amplamente utilizados em práticas de produção e outros requisitos de precisão não são particularmente altos em vários campos , especialmente na área de fabricação de máquinas-ferramenta CNC.
E os motores de passo não precisam de conversão A/D, podem converter diretamente o sinal de pulso digital em deslocamento angular, por isso foram considerados os atuadores de máquinas-ferramenta CNC mais ideais.
Além de sua aplicação em máquinas-ferramenta CNC, os motores de passo também podem ser utilizados em outras máquinas, como motores em alimentadores automáticos, motores em unidades de disquete de uso geral e também em impressoras e plotters.
In addition, the stepper motor also has many defects. Because of the stepper motor's no-load start frequency, so the stepper motor can run normally at a low speed, but if higher than a certain speed can not start, and accompanied by a sharp whistling sound. Different manufacturers of subdivision drive accuracy may vary greatly, the greater the subdivision accuracy is more difficult to control. And, stepper motor low-speed rotation has a large vibration and noise.
motor de torque
O chamado motor de torque é um motor CC de ímã permanente multipolar de tipo plano.
Sua armadura possui maior número de slots, placas de comutação e condutores série para reduzir a pulsação de torque e a pulsação de velocidade. Existem dois tipos de motores de torque, motores de torque DC e motores de torque AC.
Entre eles, o motor de torque DC tem uma pequena reatância auto-induzida, então a resposta é boa. Seu torque de saída é proporcional à corrente de entrada, independente da velocidade e posição do rotor. Ele pode funcionar em baixa velocidade diretamente conectado à carga sem redução de engrenagem em um estado quase bloqueado, de modo que pode produzir alta relação de torque para inércia no eixo da carga e eliminar o erro sistemático devido ao uso de engrenagens de redução.
Os motores de torque CA podem ser subdivididos em síncronos e assíncronos, e a corrente comumente usada é o motor de torque assíncrono de gaiola de esquilo, que possui características de baixa velocidade e grande torque. Geralmente, os motores de torque CA são frequentemente usados na indústria têxtil. Seu princípio de funcionamento e estrutura são os mesmos dos motores assíncronos monofásicos, mas suas características mecânicas são mais suaves devido à maior resistência do rotor gaiola de esquilo.
Motor de relutância de comutação
O motor de relutância comutada é um novo tipo de motor de controle de velocidade, estrutura extremamente simples e robusta, baixo custo, excelente desempenho de controle de velocidade, é um forte concorrente do motor de controle tradicional, tem forte potencial de mercado.
No entanto, também existem problemas como pulsação de torque, ruído operacional e vibração, que precisam de algum tempo para otimizar e melhorar para se adaptar à aplicação real do mercado.
Motor CC sem escova
Brushless DC motor (BLDCM) is developed on the basis of brushed DC motor, but its drive current is uncompromisingly AC. Brushless DC motors can be further divided into brushless rate motors and brushless torque motors. Generally, brushless motors have two types of drive currents, one is a trapezoidal wave (usually a "square wave") and the other is a sine wave. Sometimes the former is called a brushless DC motor and the latter is called an AC servo motor, which is also a kind of AC servo motor to be exact.
Brushless DC motors usually have a "slender" structure in order to reduce rotational inertia. Brushless DC motors are much smaller in weight and volume than brushed DC motors, and the corresponding rotational inertia can be reduced by about 40%-50%. Due to the processing problems of permanent magnet materials, the capacity of brushless DC motors is generally below 100kW.
As características mecânicas e de regulagem deste motor possuem boa linearidade, ampla faixa de velocidade, longa vida útil, fácil manutenção e baixo ruído, não havendo série de problemas causados por escovas, portanto este motor possui grande potencial para aplicação em sistemas de controle.
Brushless DC motors are usually of "slender" construction to reduce the inertia.
Os motores CC sem escova são muito menores em peso e volume do que os motores CC com escova, e a inércia rotacional correspondente pode ser reduzida em cerca de 40% a 50%. Devido aos problemas de processamento dos materiais magnéticos permanentes, a capacidade dos motores CC sem escovas é geralmente inferior a 100kW.
As características mecânicas e de regulagem deste motor possuem boa linearidade, ampla faixa de velocidade, longa vida útil, fácil manutenção e baixo ruído, não havendo série de problemas causados por escovas, portanto este motor possui grande potencial para aplicação em sistemas de controle.
motor de força
O motor de potência é dividido em motor DC e motor AC, e o motor AC é dividido principalmente em motor síncrono e motor assíncrono.
motor DC
O motor DC é o motor mais antigo, por volta do final do século 19, que pode ser dividido em duas categorias com comutador e sem comutador.
O motor DC tem melhores características de controle, embora em estrutura, preço e manutenção não sejam tão bons quanto o motor AC.
Mas porque o problema de controle de velocidade do motor AC não foi bem resolvido, e o motor DC tem as vantagens de bom desempenho de controle de velocidade, fácil de iniciar, capaz de carregar a partida,
portanto, a aplicação do motor DC ainda é muito ampla, especialmente após o surgimento da fonte de alimentação DC controlada por silício.
Status do aplicativo: Na vida, existem inúmeras aplicações de produtos elétricos, como ventiladores, aparelhos de barbear, portas automáticas em hotéis, fechaduras automáticas, cortinas automáticas, etc., todos usam motores DC.
Os motores DC também são amplamente utilizados na tração de locomotivas, como motores DC de tração para locomotivas ferroviárias, motores DC de tração para locomotivas de metrô, motores DC auxiliares para locomotivas, motores DC de tração para locomotivas de mineração, motores DC para navios, etc.
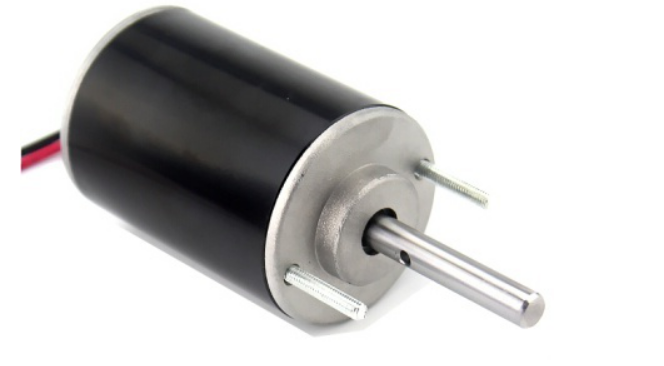
Eles também são amplamente utilizados em aeronaves, tanques, radares e outras armas e equipamentos. A imagem mostra o motor DC da série Z4.
motor CA
Motor síncrono
O chamado motor síncrono é um motor elétrico acionado por corrente alternada, o campo magnético rotativo do rotor e do estator funciona de forma síncrona.
The stator of synchronous motor is exactly the same as that of asynchronous motor, but there are two types of rotor: "convex pole" and "hidden pole".
O motor síncrono de rotor convexo é simples e fácil de fabricar, mas a resistência mecânica é baixa e é adequado para operação em baixa velocidade.
O motor síncrono de pólo oculto possui um processo de fabricação complicado, mas possui alta resistência mecânica e é adequado para operação em alta velocidade.
The working characteristic of synchronous motor is the same as all motors, which is "reversible", that is, it can run in generator mode and motor mode.
Status da aplicação: Os motores síncronos são usados principalmente em grandes máquinas, como sopradores, bombas, moinhos de bolas, compressores, laminadores de aço, instrumentos e equipamentos pequenos e miniaturas, ou como elementos de controle, dos quais os motores síncronos trifásicos são o corpo principal .
Além disso, também pode ser usado como regulador para fornecer potência reativa indutiva ou capacitiva à rede.
motor assíncrono
O motor assíncrono é um tipo de motor CA baseado na interação do campo magnético rotativo do entreferro e da corrente de indução do enrolamento do rotor para produzir torque eletromagnético e realizar a conversão de energia.
O motor assíncrono é geralmente uma série de produtos com uma ampla gama de especificações e é o mais utilizado e o mais exigido entre todos os motores.
Atualmente, cerca de 90% das máquinas na transmissão de energia usam motor assíncrono CA, de modo que seu consumo de eletricidade representa mais da metade da carga elétrica total.
O motor assíncrono tem as vantagens de estrutura simples, fácil fabricação, uso e manutenção, operação confiável, massa menor e custo mais baixo.
Além disso, o motor assíncrono tem alta eficiência operacional e boas características de trabalho, desde a faixa sem carga até a carga total próxima à operação em velocidade constante, pode atender aos requisitos de transmissão da maioria das máquinas de produção industrial e agrícola.
Os motores assíncronos são amplamente utilizados na condução de máquinas-ferramentas, bombas, sopradores, compressores, equipamentos de elevação e enrolamento, máquinas de mineração, máquinas da indústria leve, máquinas agrícolas e de processamento secundário e a maioria das máquinas de produção industrial e agrícola, bem como eletrodomésticos e equipamentos médicos.
Status da aplicação: Os motores assíncronos mais comuns são motores assíncronos monofásicos e motores assíncronos trifásicos, dos quais o motor assíncrono trifásico é o corpo principal do motor assíncrono, o motor assíncrono trifásico pode ser usado para acionar uma variedade de máquinas de uso geral, como compressores, bombas, trituradores, máquinas-ferramentas de corte, máquinas de transporte e outros equipamentos mecânicos, em mineração, maquinaria, metalurgia, petróleo, indústria química, usinas elétricas e outras empresas industriais e de mineração como o motor principal O motor é usado na mineração, maquinaria, metalurgia, petróleo, indústria química, central elétrica e outras empresas industriais e de mineração.
Motores assíncronos monofásicos são geralmente usados em locais onde uma fonte de alimentação trifásica não é conveniente, principalmente motores miniatura e de pequena capacidade, que são mais usados em eletrodomésticos, como ventiladores elétricos, refrigeradores, condicionadores de ar, aspiradores de pó, etc.
Atualmente, os motores de sinal de posição mais representativos: resolver, sincronizador de indução e máquina de ângulo autoajustável.
(1) transformador rotativo
O transformador rotativo é um sensor eletromagnético, também conhecido como decompositor síncrono. É um pequeno motor CA para medir o ângulo, usado para medir o deslocamento angular e a velocidade angular do objeto em rotação e consiste em um estator e um rotor. O enrolamento do estator é usado como lado primário do transformador para receber a tensão de excitação, e a frequência de excitação é geralmente 400, 3000 e 5000 HZ, etc. O enrolamento do rotor é usado como lado secundário do transformador para receber a tensão de excitação . O enrolamento do rotor é usado como lado secundário do transformador para obter a tensão induzida por meio do acoplamento eletromagnético.
Status da aplicação: O resolver é um dispositivo de detecção de ângulo, posição e velocidade de precisão, adequado para todas as ocasiões de resolver de transformador rotativo usando codificador rotativo, especialmente para alta temperatura, frio, umidade, alta velocidade, alta vibração e outras ocasiões em que o codificador rotativo não pode trabalhe corretamente. Devido às características acima do transformador rotativo, ele pode substituir completamente o codificador fotoelétrico e é amplamente utilizado no sistema de detecção de ângulo e posição nas áreas de sistema de controle servo, sistema de robô, ferramentas mecânicas, automóveis, energia elétrica, metalurgia, têxtil , impressão, aeroespacial, navio, arma, eletrônica, metalurgia, mineração, campo petrolífero, conservação de água, indústria química, indústria leve, construção, etc. Também pode ser usado na transformação de coordenadas, operação trigonométrica e transmissão de dados de ângulo, e como dois -deslocador de fase em dispositivo de conversão digital de ângulo.
Sincronizador de indução
O sincronizador de indução é composto usando o princípio de que a indutância mútua de dois enrolamentos planares varia com a posição e pode ser usado para medir o deslocamento linear ou angular. Entre eles, a medição do deslocamento linear é chamada de sincronizador de indução linear (ou sincronizador de indução longa), e a medição do deslocamento angular é chamada de sincronizador de indução lateral (ou sincronizador de indução rotativa). Os sincronizadores têm as vantagens de alta precisão e resolução de agregação de medição, forte capacidade anti-interferência, baixa influência do ambiente, longa vida útil, manutenção simples, podem ser unidos em vários comprimentos de medição e podem manter a precisão da unidade, boa processabilidade, baixo custo, fácil de copiar e produção em lote. Portanto, os sincronizadores são amplamente utilizados em grandes máquinas-ferramentas e máquinas de médio porte como deslocamento digital para fornecer dispositivos de exibição ou controle.
Status do aplicativo: Os sincronizadores de indução são amplamente usados para medir deslocamento linear, deslocamento angular e quantidades físicas relacionadas a eles, como velocidade de rotação, vibração, etc. controle de posicionamento de ferramentas e display digital; O sincronizador de indução circular é frequentemente usado na necessidade de alcançar o rastreamento fixo da antena, orientar a orientação escrupulosa, máquinas-ferramentas de precisão ou instrumentos de medição e dispositivo de indexação de equipamentos, etc.
máquina de ângulo auto-ajustável
A máquina de ângulo de autoalinhamento é o uso de características de autoalinhamento do ângulo na tensão CA ou da tensão CA no ângulo do micromotor de indução, no sistema servo é usado como um sensor de deslocamento para medir o ângulo. As máquinas auto-alinhadas também podem ser usadas para transmitir, transformar, receber e indicar sinais de ângulo em longas distâncias. Dois ou mais motores são ligados por circuitos de modo que dois ou mais eixos de rotação que não estão conectados uns aos outros mecanicamente mantêm automaticamente a mesma mudança de ângulo ou giram de forma síncrona, e essa propriedade do motor é chamada de característica de passo de autointegração. No sistema servo, a máquina de autoajuste usada no lado gerador é chamada de transmissor, e a máquina de autoajuste usada no lado receptor é chamada de receptor.
Status do aplicativo: A máquina de ângulo de autoalinhamento é amplamente utilizada em metalurgia, navegação e outros sistemas de indicação de sincronização de posição e orientação e artilharia, radar e outros sistemas servo.
Este é o meu resumo de algumas informações sobre a classe motora, se houver alguma falha ou local impróprio, seja bem-vindo para deixar um comentário. Obrigado!
Nós somos fabricantes profissionais de motores elétricos na China.
Se você tem qualquer demanda. Por favor nos informe!
 Ir para o conteúdo
Ir para o conteúdo 













2 Respostas
Ei, li seu artigo e suas informações são incríveis e muito úteis para mim. Continue assim e muito obrigado. 🙂 Mais informações em https://tsca.com.ph/
Obrigado por seus comentários gentis!