 Ir para o conteúdo
Ir para o conteúdo 
Nearly half of the world's power consumption is consumed by electric motors, so the high efficiency of electric motors is said to be the most effective measure in solving the world's energy problems.
Tipos de motores elétricos
Em geral, refere-se à transformação da força gerada pelo fluxo de corrente em um campo magnético em uma ação rotativa e, em uma ampla faixa, inclui também a ação linear.
Dependendo do tipo de fonte de alimentação utilizada para acionar o motor, existem motores DC e motores elétricos CA.
E de acordo com o princípio de rotação do motor, pode ser dividido nas seguintes categorias. (Exceto para motores especiais)
Motor elétrico DC/motores DC (corrente contínua)
Motores escovados
Os motores de escova amplamente utilizados são geralmente chamados de motores elétricos DC.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Motor CC sem escova
Os motores CC sem escova não usam escovas ou comutadores, mas usam uma função de comutação, como um transistor, para alternar a corrente e executar a ação rotacional.
Motor de passo.
Este motor funciona em sincronia com a potência de pulso e, portanto, também é chamado de motor de indução de pulso.
É caracterizado pela capacidade de alcançar facilmente uma operação de posicionamento preciso.
motores CA
motor assíncrono
A potência CA gera um campo magnético rotativo no estator, que por sua vez gera uma corrente induzida no rotor, em cuja interação ocorre a rotação para o motor de indução CA.
Motor síncrono
A energia CA cria um campo magnético rotativo e o rotor com pólos magnéticos gira devido à atração.
-A velocidade de rotação felizmente é sincronizada com a frequência da fonte de alimentação.
Sobre correntes, campos magnéticos e forças
First, for the sake of subsequent motor principle explanations, let's review the basic laws/laws regarding current, magnetic field and force.
Embora haja um sentimento de nostalgia, é fácil esquecer esse conhecimento se você não costuma usar componentes magnéticos
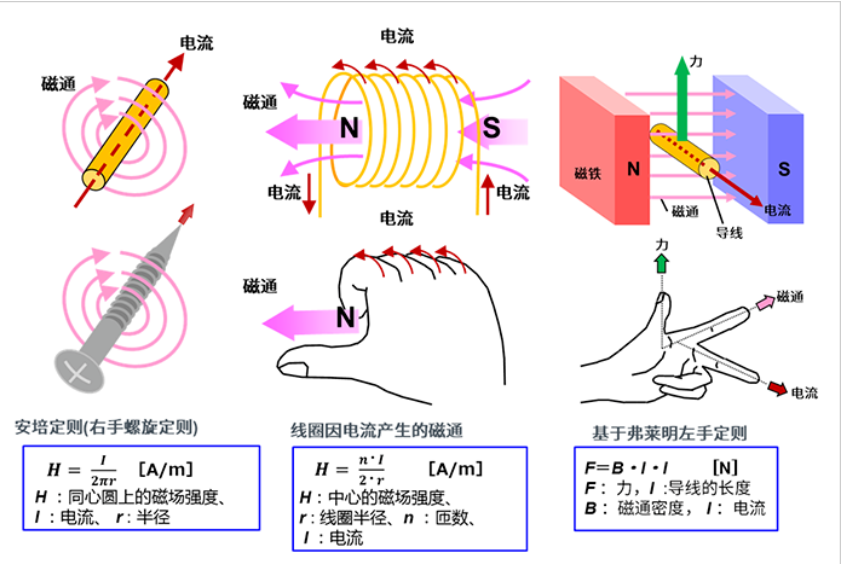
Combinamos imagens e fórmulas para ilustrar.
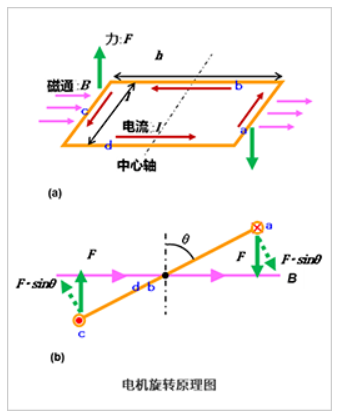
Quando a armação de arame é retangular, a força que atua na corrente é levada em consideração.
A força F atuando nas partes dos lados a e c é
O torque é gerado com o eixo central como eixo central.
Por exemplo, ao considerar um estado onde o ângulo de rotação é apenas θ, a força que atua em ângulos retos para b e d é sinθ, então o torque Ta da peça a é dado por:
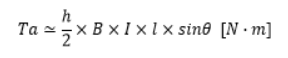
Considerando a parte c da mesma forma, o torque é dobrado e gera o torque calculado pela seguinte equação

Como a área do retângulo é S = h·l, substituí-la na equação acima fornece o seguinte resultado.

A fórmula se aplica não apenas a retângulos, mas também a outras formas comuns, como círculos. O motor faz uso deste princípio.
Como gira um motor elétrico?
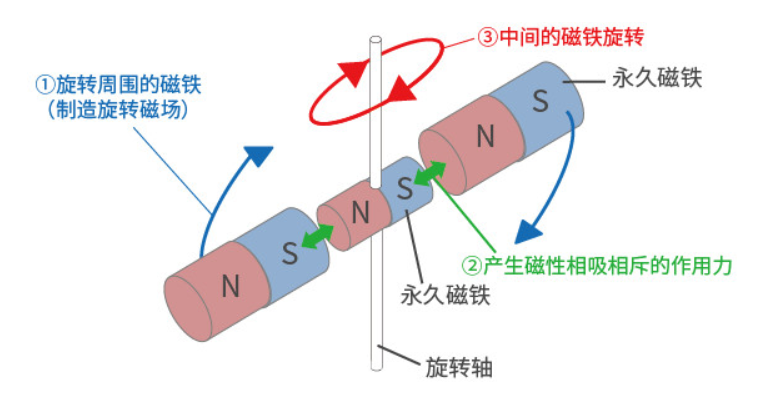
1) Os motores de indução giram com a ajuda de ímãs e força magnética
Em torno de um ímã permanente com um eixo rotativo,
① o ímã é girado (para que um campo magnético rotativo seja gerado),
② então, de acordo com o princípio de que os polos N e S se atraem em polos diferentes e se repelem no mesmo nível,
③ o ímã com um eixo rotativo irá girar.
Este é o princípio básico da rotação dos motores CA.
A corrente que circula no condutor causa um campo magnético giratório (força magnética) ao seu redor e assim o ímã gira, que é praticamente o mesmo estado de ação que este.
Além disso, quando o fio é enrolado em forma de bobina, a força magnética é sintetizada, criando um grande fluxo de campo magnético (fluxo) que produz os pólos N e S.
Além disso, inserindo um núcleo de ferro no fio semelhante a uma bobina, as linhas de força magnéticas tornam-se fáceis de passar e uma força magnética mais forte pode ser gerada.
2) Motor rotativo real
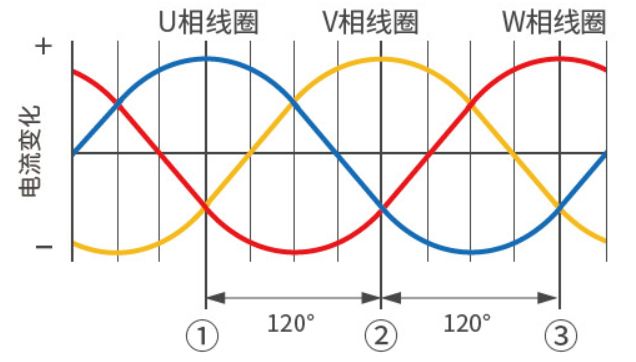
Aqui, como um método prático de rotação do motor, apresentamos o método de criação de um campo magnético rotativo usando motor CA trifásico e bobinas.
(Motores industriais CA trifásicos são um sinal CA com espaçamento de 120° em fase)
O campo magnético sintético no estado ① acima corresponde à figura ① abaixo.
O campo magnético sintético no estado ② acima corresponde à figura ② abaixo.
O campo magnético sintético no estado ③ acima corresponde à figura ③ abaixo.
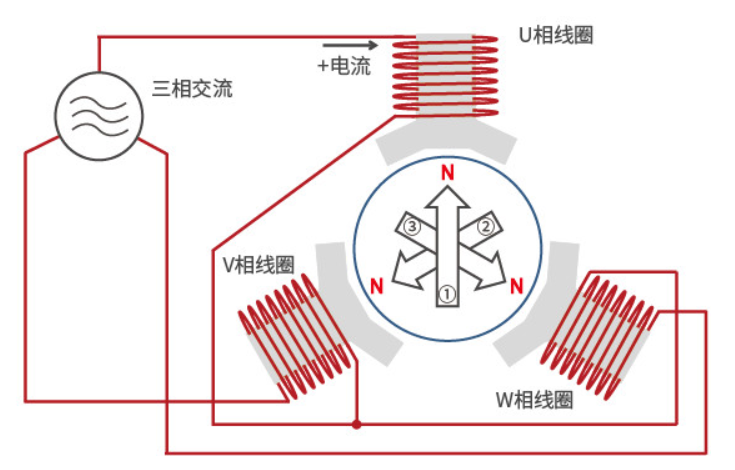
Como mencionado acima, as bobinas do núcleo enrolado são divididas em três fases, com configuração de intervalo de 120° de bobinas de fase U, bobinas de fase V e bobinas de fase W, com a bobina com alta tensão produzindo pólo N e a bobina com pólo S de produção de baixa tensão.

Cada fase muda de acordo com uma onda senoidal, então a polaridade (pólo N, pólo S) e seu campo magnético (força magnética) gerado por cada bobina mudarão.
Neste momento, a bobina que produz o pólo N sozinha muda em sequência de acordo com a bobina da fase U → bobina da fase V → bobina da fase W → bobina da fase U e, portanto, ocorre a rotação.

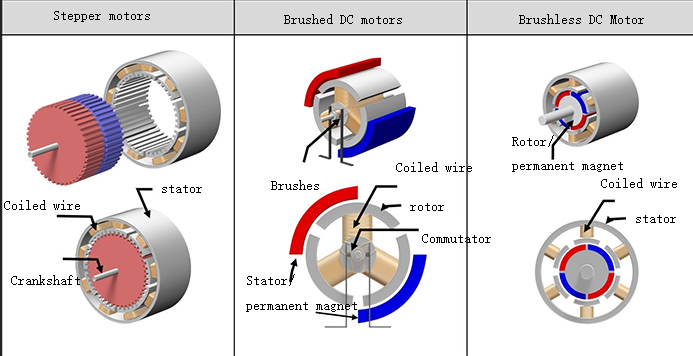
Estrutura de um pequeno motor
A figura a seguir fornece a estrutura aproximada e a comparação de três tipos de motores industriais: motores de passo, motores CC (CC) com escovas e motores CC (CC) sem escova.
Os componentes básicos desses motores são principalmente bobinas, ímãs e rotores, e também existem tipos fixos em bobinas e fixos em ímãs, dependendo do tipo.
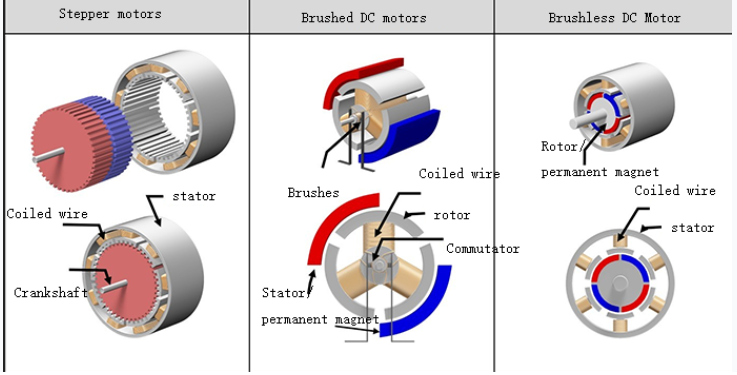
A seguir está uma descrição da estrutura associada ao diagrama de exemplo. Como pode haver outras estruturas se divididas com mais cuidado, entenda que a estrutura apresentada neste artigo está sob um quadro grande.
A bobina do motor de passo aqui é fixada no lado externo e o ímã é girado no lado interno.
Aqui, o ímã do motor CC com escovas é fixado no lado externo e a bobina gira no lado interno. T
As escovas e o comutador são responsáveis por fornecer energia à bobina e mudar o sentido da corrente.
No caso de um motor brushless, a bobina é fixada por fora e o imã gira por dentro.
A estrutura de um motor brushless é diferente mesmo que os componentes básicos sejam os mesmos devido aos diferentes tipos de motores. Os detalhes serão explicados em cada seção.
Motor de escova
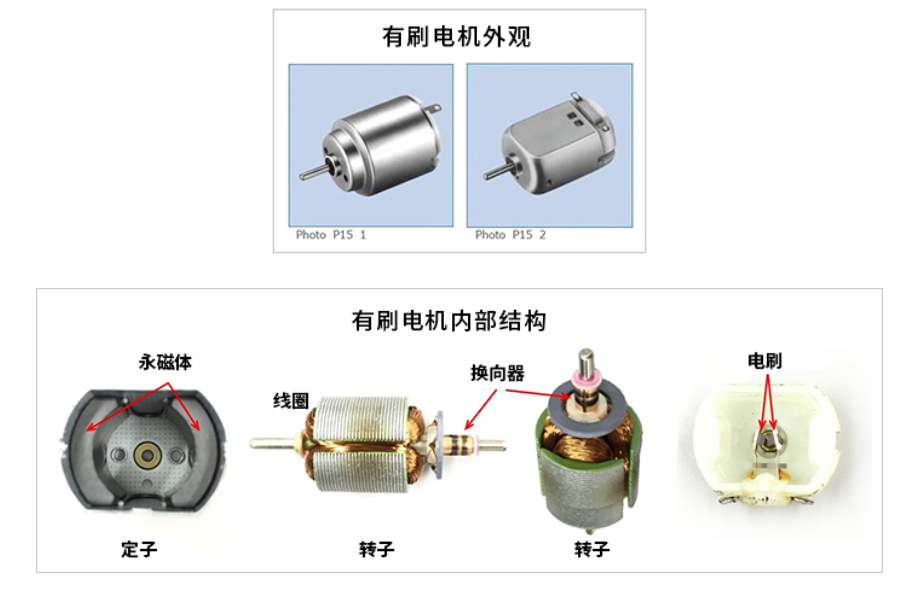
Estrutura de motores DC com escovas
Abaixo está a aparência de um motor CC com escovas frequentemente usado em modelos e um diagrama esquemático da quebra de um motor normal de dois pólos (2 ímãs) e três slots (3 bobinas). Talvez muitos de vocês tenham experiência em desmontar o motor elétrico CC e retirar os ímãs.
Você pode ver que os ímãs permanentes de um motor CC com escovas são fixos e as bobinas de um motor CC com escovas podem girar em torno do centro interno.
The fixed side is called the "stator" and the rotating side is called the "rotor".
O que se segue é um esboço estrutural que representa o conceito de estrutura.
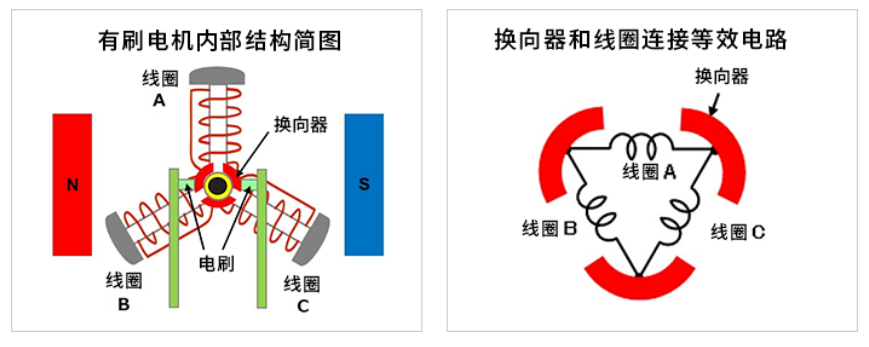
A periferia do eixo central rotativo possui três comutadores (folhas de metal dobradas para comutação de corrente).
Para evitar contato um com o outro, os comutadores são configurados separados por 120° (360° ÷ 3 peças). Os comutadores giram com a rotação do eixo.
Um comutador é conectado a uma extremidade da bobina e a outra extremidade da bobina, e os três comutadores e as três bobinas formam um todo (anel) como uma rede de circuitos.
Duas escovas são fixadas em 0° e 180° para fazer contato com o comutador.
Uma fonte de alimentação CC externa é conectada às escovas e a corrente flui no caminho escova → comutador → bobina → escova.
Princípio de rotação do motor DC da escova
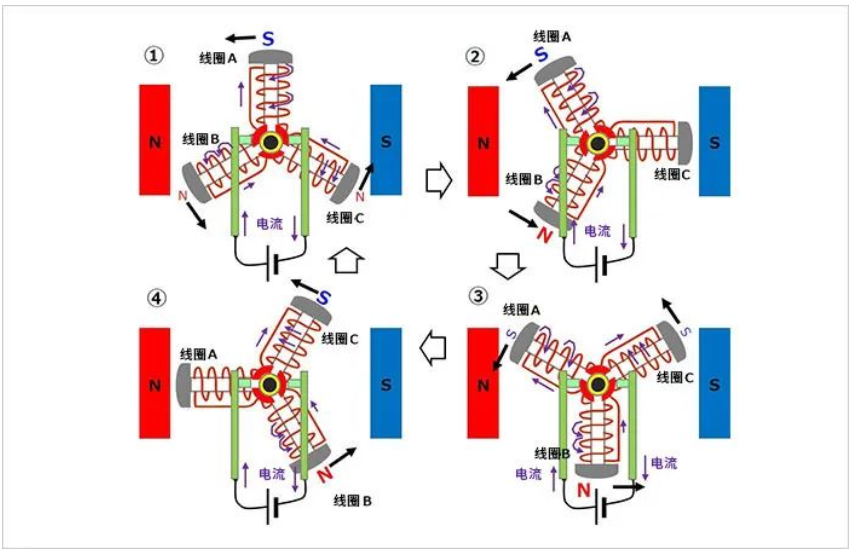
① Gire no sentido anti-horário a partir do estado inicial
A Bobina A está na parte superior e conecta a alimentação das ferramentas elétricas às escovas, coloque o lado esquerdo como (+) e o lado direito como (-).
Uma grande corrente flui da escova esquerda através do comutador para a bobina A.
Esta é a estrutura onde a parte superior (externa) da bobina A torna-se o pólo S.
E como 1/2 da corrente da bobina A flui da escova esquerda para as bobinas B e C na direção oposta da bobina A, os lados externos das bobinas B e C tornam-se pólos N fracos (indicados por letras ligeiramente menores no figura).
Os campos magnéticos gerados nessas bobinas e os efeitos repulsivos e atrativos dos ímãs fazem com que as bobinas sejam submetidas a uma força de rotação no sentido anti-horário.
② Mais rotação no sentido anti-horário
Em seguida, suponha que a escova direita esteja em contato com ambos os comutadores em um estado em que a bobina A é girada 30° no sentido anti-horário.
A corrente da bobina A flui continuamente da escova esquerda através da escova direita e o lado externo da bobina permanece no pólo S.
A mesma corrente da bobina A flui através da bobina B, e o lado externo da bobina B torna-se um pólo N mais forte.
Como as extremidades da bobina C estão em curto pelas escovas, nenhuma corrente flui e nenhum campo magnético é gerado.
Mesmo neste caso, há uma força de rotação no sentido anti-horário.
A bobina no lado superior de ③ a ④ está continuamente sujeita a uma força que se move para a esquerda, e a bobina inferior está continuamente sujeita a uma força que se move para a direita e continua a girar no sentido anti-horário
Quando a bobina gira a cada 30° para ③ e ④, o lado externo da bobina torna-se o pólo S quando a bobina está acima do eixo horizontal central; quando a bobina está abaixo, ela se torna o pólo N e o movimento é repetido.
Em outras palavras, a bobina superior é repetidamente submetida a uma força que se move para a esquerda e a bobina inferior é repetidamente submetida a uma força que se move para a direita (ambas no sentido anti-horário). Isso faz com que o rotor gire no sentido anti-horário o tempo todo.
Se a energia for conectada à escova esquerda oposta (-) e escova direita (+), um campo magnético é gerado nos enrolamentos do estator das bobinas na direção oposta, de modo que a força aplicada às bobinas se move na direção oposta e se torna rotação no sentido horário .
Além disso, quando a energia é desligada, o rotor do motor de escovas para de girar porque fica privado do campo magnético que o mantém girando.
Motor brushless trifásico de onda completa
Aparência e estrutura de um motor brushless trifásico de onda completa
A figura a seguir mostra um exemplo da aparência e estrutura de um motor brushless.
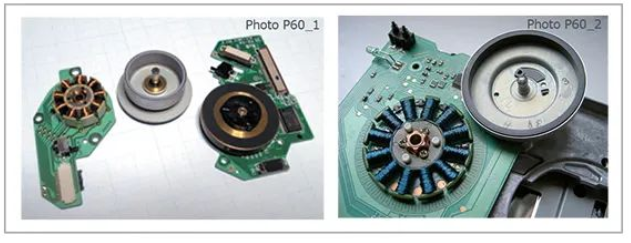
À esquerda está um exemplo de um motor de eixo usado para girar um disco em um dispositivo de reprodução de disco. Existem 9 bobinas de três fases x 3. À direita está um exemplo de um motor de eixo para um dispositivo FDD com 12 bobinas (trifásico x 4). As bobinas são fixadas na placa e enroladas no núcleo.
A parte em forma de disco no lado direito das bobinas é o rotor de imã permanente. O eixo do rotor é inserido no centro da bobina e cobre a parte da bobina, e os ímãs permanentes envolvem a periferia da bobina.
A estrutura interna do motor brushless trifásico de onda completa e o circuito equivalente da conexão da bobina
A seguir, um esboço da estrutura interna e o circuito equivalente da conexão da bobina.
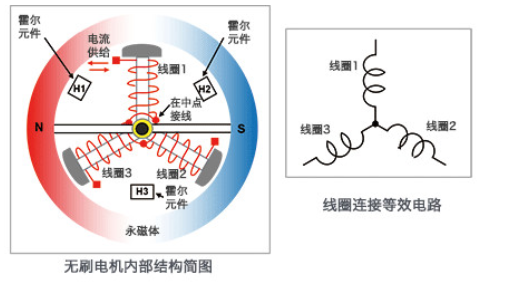
Este esboço da estrutura interna é um exemplo de um motor de 2 polos (2 ímãs) e 3 slots (3 bobinas) com uma estrutura muito simples. É semelhante à estrutura de um motor de escovas com o mesmo número de pólos e slots, mas o lado da bobina é fixo e os ímãs podem ser girados. Claro, não há pincéis.
Nesse caso, as bobinas são conectadas em forma de Y e um elemento semicondutor é usado para fornecer corrente às bobinas, controlando a entrada e saída de corrente de acordo com a posição dos ímãs rotativos.
Neste exemplo, um elemento Hall é usado para detectar a posição do ímã. O elemento Hall é configurado entre a bobina e a bobina para detectar a tensão gerada e usada como informação de posição com base na intensidade do campo magnético. Na imagem do motor do fuso FDD fornecida anteriormente, você também pode ver o elemento Hall usado para detectar a posição entre a bobina e a bobina (acima da bobina).
Os elementos Hall são conhecidos como sensores magnéticos.
Ele pode converter a magnitude do campo magnético na magnitude da tensão e indicar a direção do campo magnético em termos positivos ou negativos.
Abaixo está um diagrama mostrando o efeito Hall.
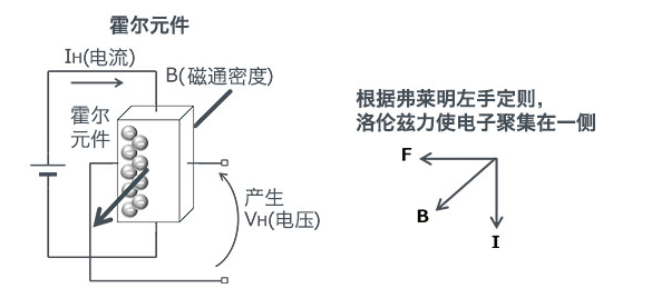
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
A tensão resultante VH é expressa pela seguinte equação.
VH = (KH / d)・IH・B ※KH: coeficiente Hall, d: espessura da superfície de penetração do fluxo
Como mostra a fórmula, quanto maior a corrente, maior a tensão. Essa propriedade é frequentemente usada para detectar a posição do rotor (ímã).
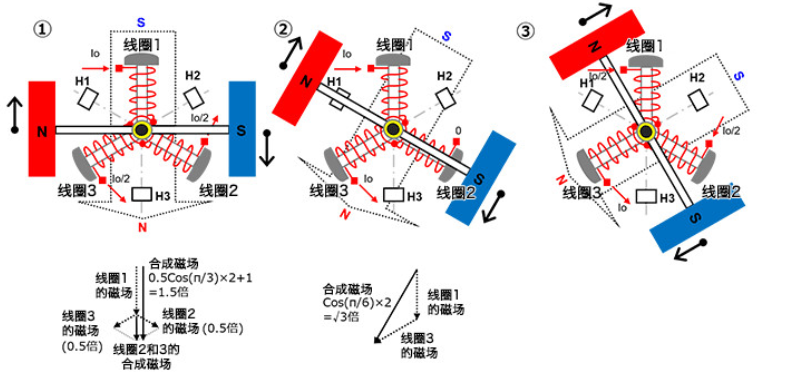
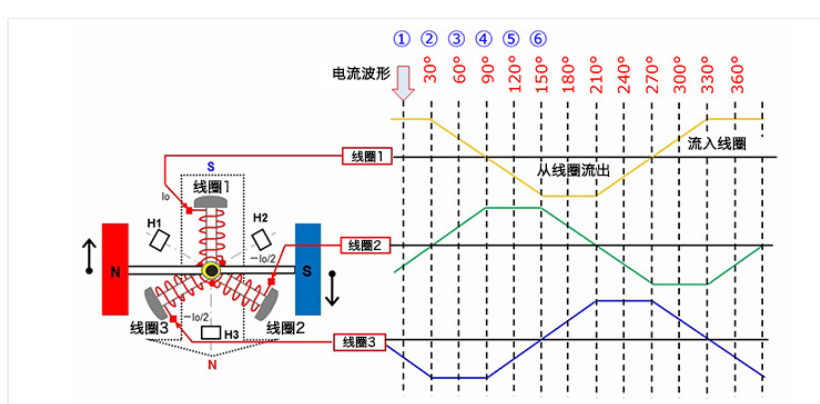
Princípio de rotação do motor brushless trifásico de onda completa
O princípio de rotação do motor brushless será explicado nas seguintes etapas ① a ⑥. Para facilitar a compreensão, o ímã permanente é simplificado de um círculo para um retângulo aqui.
①
In a 3-phase coil, let coil 1 be fixed at 12 o'clock, coil 2 be fixed at 4 o'clock and coil 3 be fixed at 8 o'clock of the clock. Let the N-pole of the 2-pole permanent magnet be on the left side and the S-pole on the right side and rotatable.
Faça a corrente Io fluir para a bobina 1 para produzir o campo magnético do polo S na parte externa da bobina. Deixe a corrente Io/2 fluir para fora da bobina 2 e da bobina 3 para produzir um campo magnético N-polo na parte externa da bobina.
Quando os campos magnéticos das bobinas 2 e 3 são sintetizados vetorialmente, o campo magnético N-polo é gerado para baixo, que é 0,5 vezes o tamanho do campo magnético gerado quando a corrente Io passa por uma bobina e se torna 1,5 vezes o tamanho quando adicionado ao campo magnético da bobina 1. Isso produz um campo magnético sintético em um ângulo de 90° em relação ao ímã permanente, de modo que o torque máximo pode ser gerado e o ímã permanente gira no sentido horário.
Quando a corrente na bobina 2 é reduzida e a corrente na bobina 3 é aumentada de acordo com a posição de rotação, o campo magnético sintético também gira no sentido horário e o ímã permanente continua a girar.
②
No estado girado de 30°, a corrente Io flui para a bobina 1 de modo que a corrente na bobina 2 seja zero, fazendo com que a corrente Io flua para fora da bobina 3.
O lado externo da bobina 1 torna-se o pólo S e o lado externo da bobina 3 torna-se o pólo N. Quando o vetor é sintetizado, o campo magnético produzido é √3 (≈1,72) vezes o campo magnético produzido quando a corrente Io passa por uma bobina. Isso também produz um campo magnético sintetizado em um ângulo de 90° em relação ao campo magnético do ímã permanente e gira no sentido horário.
Quando a corrente de entrada Io da bobina 1 é reduzida de acordo com a posição de rotação, a corrente de entrada da bobina 2 é aumentada de zero e a corrente de saída da bobina 3 é aumentada para Io, o campo magnético sintético também gira no sentido horário e o permanente ímã continua a girar.
Supondo que a corrente em cada fase seja senoidal, o valor da corrente aqui é Io × sin(π⁄3) = Io × √3⁄2. Pela síntese vetorial do campo magnético, o tamanho total do campo magnético é (√3⁄2)2 × 2 = 1,5 vezes o campo magnético gerado por uma bobina. Quando as correntes em cada fase são senoidais, a magnitude do campo magnético de síntese vetorial é 1,5 vezes o campo magnético produzido por uma bobina, independentemente da posição do ímã permanente, e o campo magnético está em um ângulo de 90° em relação a o campo magnético do imã permanente.
③
No estado em que a rotação continua por 30°, a corrente Io/2 flui para a bobina 1, a corrente Io/2 flui para a bobina 2 e a corrente Io flui para fora da bobina 3.
O lado externo da bobina 1 se torna o pólo S, o lado externo da bobina 2 também se torna o pólo S e o lado externo da bobina 3 se torna o pólo N. Quando o vetor é sintetizado, o campo magnético produzido é 1,5 vezes o campo magnético produzido quando a corrente Io flui através de uma bobina (igual a ①). Aqui também, um campo magnético sintético é gerado em um ângulo de 90° em relação ao campo magnético do ímã permanente e gira no sentido horário.
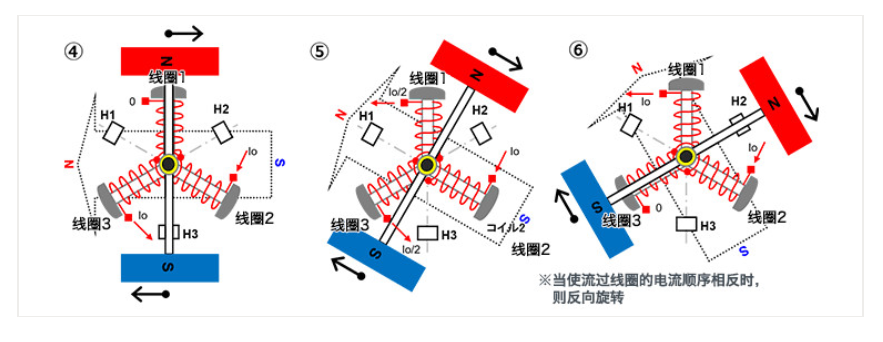
④~⑥
Gire da mesma forma que ① para ③.
Desta forma, se a corrente que flui para a bobina for continuamente comutada sequencialmente de acordo com a posição do imã permanente, o imã permanente girará em uma direção fixa. Da mesma forma, se a corrente for invertida e a direção do campo magnético sintético for invertida, ela girará no sentido anti-horário.
O diagrama a seguir mostra as correntes em cada bobina para cada uma das etapas ① a ⑥ acima em sucessão. A relação entre mudança de corrente e rotação deve ser entendida pela descrição acima.
motores de passo
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Estrutura do motor de passo (bipolar bifásico)
Os diagramas a seguir, da esquerda para a direita, mostram um exemplo da aparência de um motor de passo, um esboço da estrutura interna e um esboço do conceito da estrutura.
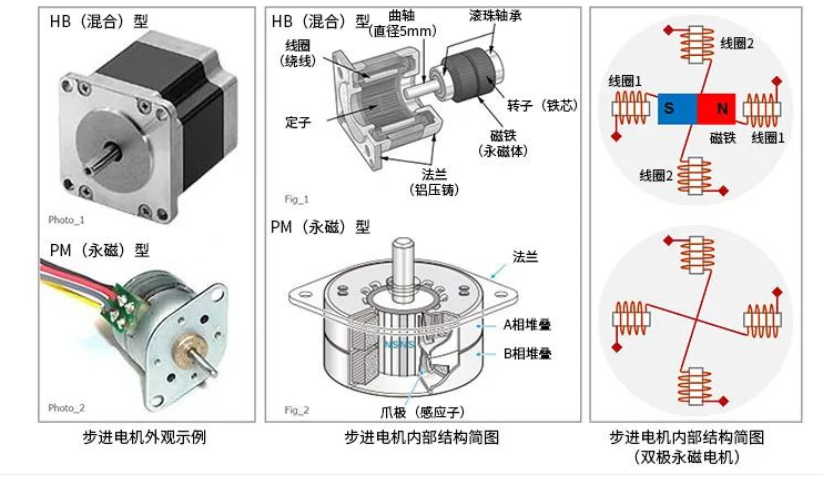
No exemplo de aparência, a aparência dos motores de passo do tipo HB (híbrido) e PM (ímã permanente) é fornecida. O diagrama de estrutura no meio também é fornecido para o tipo HB e tipo PM.
O motor de passo é uma estrutura na qual a bobina é fixa e o imã permanente gira. O diagrama conceitual da estrutura interna de um motor de passo à direita é um exemplo de um motor PM usando duas fases (dois conjuntos) de bobinas. No exemplo básico da estrutura do motor de passo, as bobinas são configuradas do lado de fora e os ímãs permanentes são configurados do lado de dentro. Além das bobinas bifásicas, também existem tipos com maior número de fases, como trifásicas e quinfásicas.
Alguns motores de passo possuem outras estruturas diferentes, mas a estrutura básica do motor de passo é fornecida neste artigo para facilitar a introdução de seu princípio de operação. Através deste trabalho, esperamos entender a estrutura básica dos motores de passo com bobinas fixas e ímãs permanentes rotativos.
Princípio básico de funcionamento do motor de passo (excitação monofásica)
O diagrama a seguir é usado para apresentar o princípio operacional básico de um motor de passo. Este é um exemplo de excitação para cada fase (conjunto de bobinas) das bobinas bifásicas do tipo bipolar acima. A premissa do diagrama é que o estado muda de ① para ④. As bobinas consistem na bobina 1 e bobina 2, respectivamente. Além disso, as setas de corrente indicam a direção do fluxo de corrente.
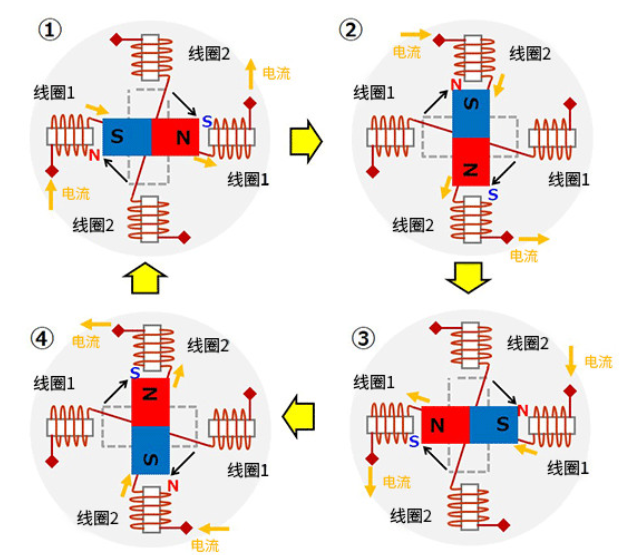
①
・Faça a corrente fluir do lado esquerdo da bobina 1 e sair do lado direito da bobina 1.
・Não permita que a corrente flua através da bobina 2.
・Neste momento, o lado interno da bobina esquerda 1 torna-se N e o lado interno da bobina direita 1 torna-se S.
・Como resultado, o imã permanente do meio é atraído pelo campo magnético da bobina 1 e muda para o lado esquerdo S e para o lado direito N e para.
②
・A corrente da bobina 1 é interrompida para que a corrente flua do lado superior da bobina 2 e saia do lado inferior da bobina 2.
・O lado interno da bobina superior 2 muda para N e o lado interno da bobina inferior 2 muda para S.
・O ímã permanente é atraído por seu campo magnético e gira 90° no sentido horário para parar.
③
・A corrente da bobina 2 é interrompida para que a corrente flua do lado direito da bobina 1 e saia do lado esquerdo da bobina 1.
・O lado interno da bobina esquerda 1 torna-se S e o lado interno da bobina direita 1 torna-se N.
・O ímã permanente é atraído por seu campo magnético e gira no sentido horário mais 90° para parar.
④
・Pare a corrente na bobina 1 para que a corrente flua do lado inferior da bobina 2 e saia do lado superior da bobina 2.
・O lado interno da bobina superior 2 torna-se S e o lado interno da bobina inferior 2 torna-se N.
・O ímã permanente é atraído por seu campo magnético e gira no sentido horário mais 90° para parar.
O motor de passo pode ser girado alternando a corrente que flui através da bobina pelo circuito eletrônico na ordem de ① a ④ acima. Neste exemplo, cada ação de comutação faz com que o motor de passo gire 90°.
Além disso, quando a corrente flui continuamente através de uma bobina, o estado de parada pode ser mantido e o motor de passo pode ter um torque de retenção. Aliás, se a ordem da corrente que flui através da bobina for invertida, o motor de passo pode ser feito para girar no sentido inverso.
Find a professional industrial motor manufacturer - Dongchun motor China







