 Skip naar inhoud
Skip naar inhoud Wat is het verschil tussen een borstelloze motor en een borstelmotor?
Wat is het verschil tussen een synchrone motor en een asynchrone motor?
Hoe zit het met de inductiemotor met wondrotor?
Zijn alle servomotoren AC-motoren?
Zijn alle servomotoren synchrone motoren?
Behoren stappenmotoren tot DC-motoren of AC-motoren?
Is een servomotor een servomotor? ......
De wijzen zeiden ooit: Als kennis niet systematisch is, wat is dan het verschil tussen kennis en een paragraaf?
Maar het wijze boek over die langdradige tekst, die fantasierijke terminologie, die plausibele verklaring, kijkt echt naar mensen in de wolken.
Ik heb ook lang op internet gezocht, maar vond geen meer systematische uitleg van de structuur van de elektromotoren en het classificatieprincipe, dus het kostte me veel moeite om een kopie op te vragen en te ordenen.
Dit artikel probeert de systematische kennis in gewone taal uit te leggen, en gebruikt veel animaties en afbeeldingen om de obscure kennis levendig uit te drukken.
Vanwege mijn beperkte kennis is het onvermijdelijk dat er veel fouten in voorkomen. Corrigeer alstublieft de experts, aarzel niet om advies te geven.
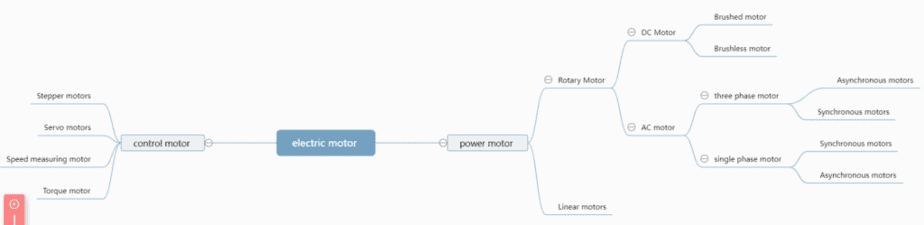
1. een schema om de basistypen elektromotoren uit te leggen
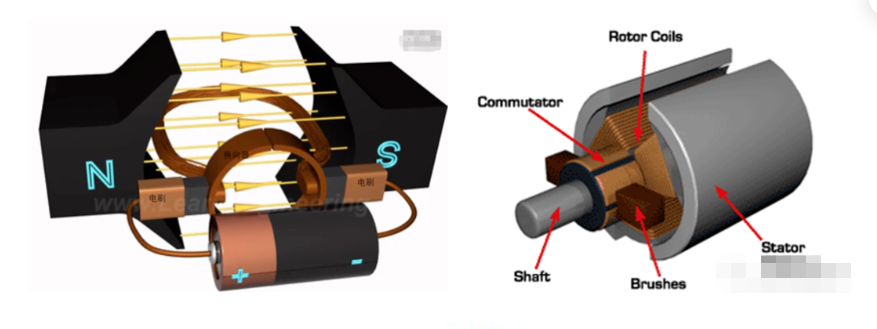
2. DC-elektromotor - borstelmotor
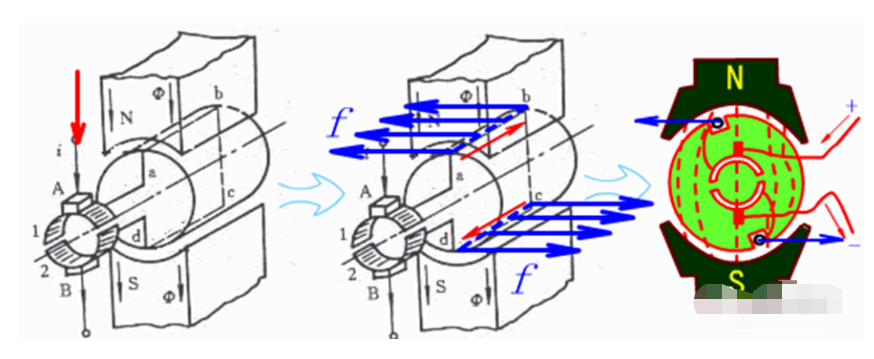
Lees de natuurkunde van de middelbare school van het pestkop-tuig, weet dat om de bekrachtigde geleider in de magnetische veldkracht van dat ding te bestuderen, we de linkerhand in een gebroken handpalm hebben getraind, wat precies het principe is van de DC-inductiemotor.
Alle elektromotoren zijn samengesteld uit stator en rotor. Bij DC-elektromotoren moet je, om de rotor te laten draaien, voortdurend de richting van de stroom veranderen, anders kan de rotor maar een halve slag draaien, dit is als een fietspedaal.
Daarom hebben DC-motoren commutatoren nodig.
In grote lijnen omvatten geborstelde gelijkstroommotoren geborstelde motoren en borstelloze motoren.
Borstelmotor wordt ook DC-inductiemotor of koolborstelmotor genoemd, vaak borstel-DC-motor genoemd.
Het maakt gebruik van mechanische commutatie, de externe pool beweegt de interne spoel (anker) niet in beweging, commutator en rotorspoel roteren samen, borstels en magneten bewegen niet, dus de commutator en borstelwrijvingswrijving voltooien de stroomrichtingomschakeling.
Nadelen van de borstelmotor.
1, mechanische commutatie van vonken gegenereerd door de commutator en borstelwrijving, elektromagnetische interferentie, hoog geluid, korte levensduur.
2, slechte betrouwbaarheid, veel storingen, die regelmatig onderhoud vereisen.
3, vanwege de aanwezigheid van een commutator, die de traagheid van de rotor beperkt, de maximale snelheid beperkt en de dynamische prestaties beïnvloedt.
Omdat het zoveel tekortkomingen heeft, wordt het nog steeds vaak gebruikt, omdat het een hoog koppel heeft, een eenvoudige structuur, gemakkelijk onderhoud (d.w.z. koolborstels vervangen), goedkoop.
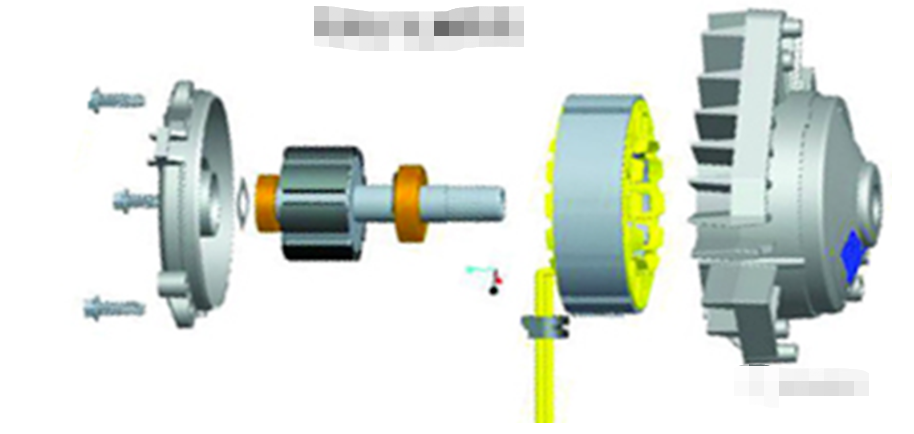
2. DC-motoren - borstelloze motoren
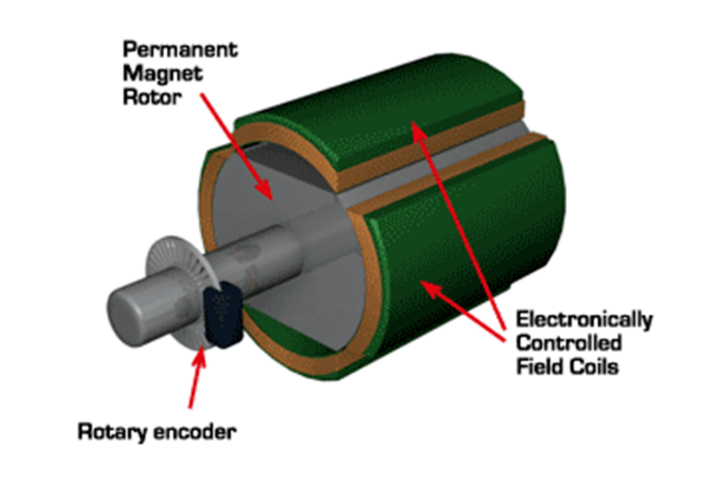
Borstelloze motor wordt in sommige velden ook wel DC-invertermotor (BLDC) genoemd, deze maakt gebruik van elektronische commutatie (Hall-sensor), de spoel (anker) beweegt niet, de magnetische polen bewegen niet, dan kan de permanente magneet zich buiten de spoel of binnen de spoel bevinden, dus er is een borstelloze motor met externe rotor en borstelloze motor met interne rotor
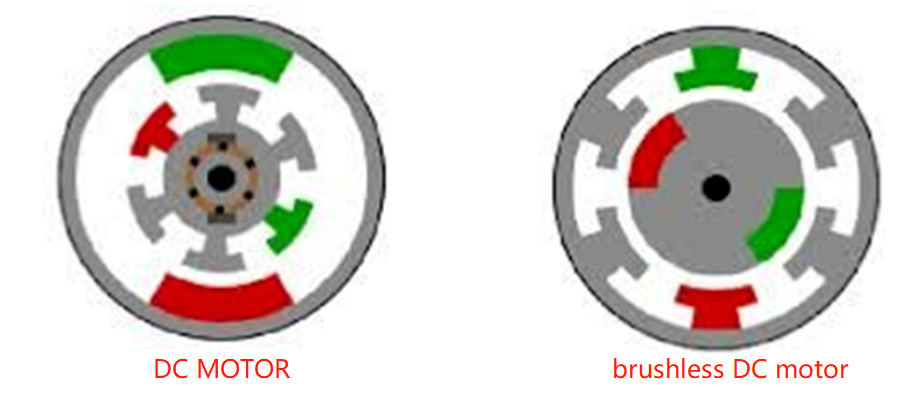
Borstelloze motoren zijn op dezelfde manier geconstrueerd als synchrone motoren met permanente magneet.
Een enkele borstelloze motor is echter geen compleet voedingssysteem. Brushless moet in principe worden bestuurd door een borstelloze controller, ook wel ESC genoemd, om een continue werking te bereiken.
Het is de borstelloze elektronische regelaar (ESC) die de prestaties echt bepaalt.
Over het algemeen zijn er twee soorten aandrijfstromen voor borstelloze motoren: de ene is een blokgolf en de andere is een sinusgolf.
Soms wordt de eerste een DC-borstelloze motor genoemd, en de laatste een AC-servomotor, wat precies een soort AC-servomotor is.
Borstelloze motoren werken op verschillende manieren en kunnen worden onderverdeeld in borstelloze motoren met binnenrotor en borstelloze motoren met buitenrotor.
De binnenrotor is driefasig, wat duurder is.
De buitenste rotor wordt meestal in eenfase gebruikt, de prijs van de mensen, massaproductie ligt dicht bij de koolborstelmotor, dus de laatste jaren wordt deze op grote schaal gebruikt.
De prijs van de driefasige buitenrotor ligt dicht bij de prijs van de binnenrotor.
Zoals je kunt raden, is het nadeel van borstelmotoren het punt van borstelloze motoren.
Het heeft een hoog rendement, een laag energieverbruik, een laag geluidsniveau, een lange levensduur, hoge betrouwbaarheid, servobesturing, traploze frequentieconversiesnelheid (tot zeer hoge snelheid) en andere voordelen.
Het is relatief kleiner dan de DC-borstelmotor, de bediening dan de asynchrone AC-motor is eenvoudig, het startkoppel is groot overbelastbaarheid, wat de nadelen betreft ...... is duurder dan de borstel, slecht onderhoud.
2. DC-motor - snelheidsregelprincipe
Snelheidsregeling DC-inductiemotor: de zogenaamde snelheidsregeling, dat wil zeggen door het motortoerental aan te passen om het vereiste koppel te verkrijgen.
DC-motor met permanente magneet door aanpassing van de spanning, serieweerstand, verandering van de excitatie kan snelheid zijn, maar de werkelijke spanningsaanpassing is het handigst en meest gebruikt, het belangrijkste gebruik van PWM-snelheidsregeling.
PWM is actually through the high-speed switch to achieve DC voltage regulation, a cycle, open a long time, the average voltage is high, off a long time, the average voltage is low, very convenient to adjust, as long as the switch speed As long as the switching speed is fast enough, the harmonics of the grid is less, and the current is more continuous.
However, the brushes and commutator wear for a long time, and at the same time there is a huge current change during commutation, which is very easy to produce sparks.
The commutator and brushes limit the capacity and speed of DC induction motor, which makes the speed regulation of DC induction motor meet a bottleneck.
For brushless DC induction motor, the speed control only controls the input voltage on the surface.
But the motor's self-control frequency control system (brushless DC motor itself comes with a rotor position detector and other rotor position signal acquisition device, using the rotor position signal of this device to control the variable voltage frequency control device phase change moment) automatically controls the frequency according to the variable voltage, which is almost the same as the DC (brushed) motor, very convenient. Very convenient.
Because the rotor uses permanent magnets, no special excitation winding, in the case of the same capacity, the motor is smaller, lighter, more efficient, more compact, more reliable operation, better dynamic performance, in the drive of electric vehicles and other aspects have been widely used.
3. Driefasige wisselstroommotoren - asynchrone motoren
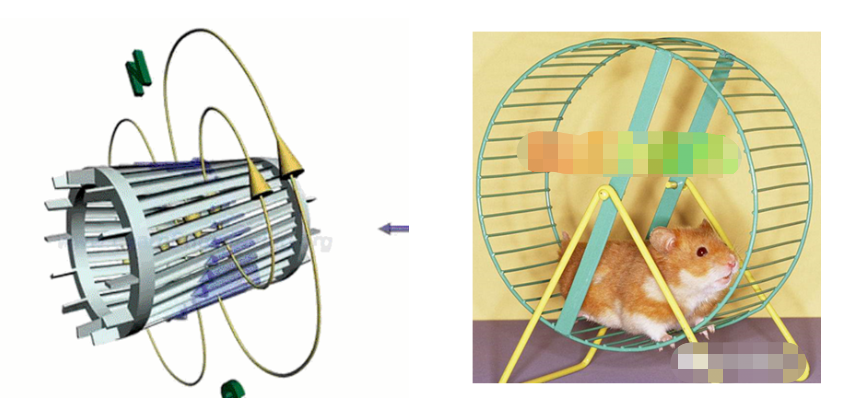
AC motors are divided into synchronous motors and asynchronous motors, synchronous motors are mostly used in generators and asynchronous motors are mostly used in electric motors. They are squirrel cage induction motor.
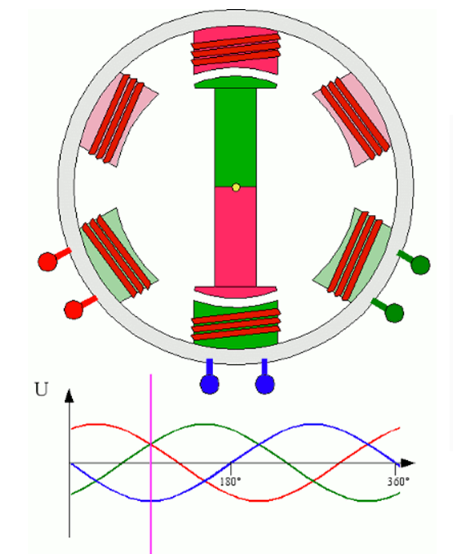
The housing of the motor is the stator, and there are three symmetrical AC windings on the stator.
As the sequence of the three phases changes, a rotating synthetic magnetic field is formed, and the rotational speed of the magnetic field is the synchronous speed.
The synchronous speed n=60f/p, f is the frequency, p is the number of pole pairs, for example, for a 2-pole motor connected to the national grid 50Hz (i.e. the number of pole pairs is 1 pair), then the speed n=60*50/1=3000r/min.
Similarly, the synchronous speed of 4-pole, 6-pole and 8-pole motors is 1500, 1000 and 750.
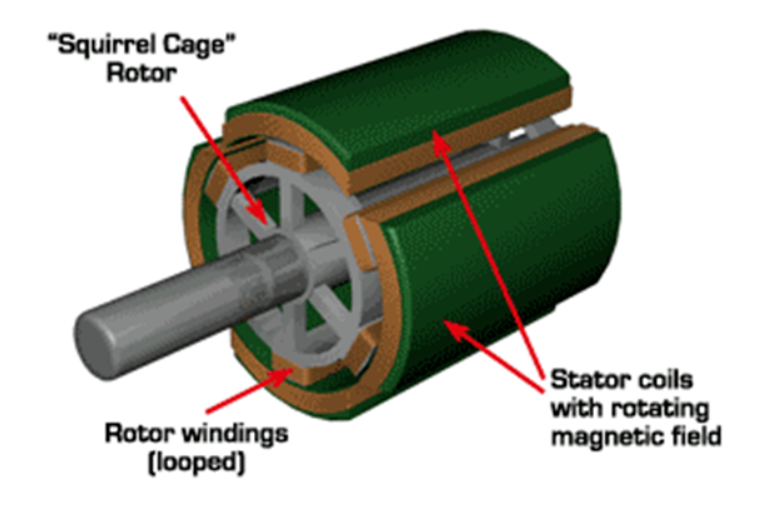
Asynchronous motors have a simple mechanism with a closed coil rotor, such as a squirrel cage type.
The rotor coil will cut the rotating magnetic field to generate the induced electric potential, which in turn generates the induced current, and finally the rotating magnetic field.
So that the rotor becomes an electromagnet and will follow the rotation of the stator magnetic field, so the rotor speed must be < the rotating magnetic field of the stator, so as to cut the magnetic induction lines.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
That is, the asynchronous speed of the rotor <synchronous speed, there is a speed difference between the rotor and stator magnetic field, so it is called an asynchronous motor.
The rated speed of asynchronous motor varies slightly from manufacturer to manufacturer, about 2800+r/min for 2-pole motor, 1400+,950+,700+ for 4-pole, 6-pole and 8-pole asynchronous.
The speed of asynchronous motor is high when no load, and decreases when there is a load.
Asynchronous motor has simple structure, easy maintenance, reliable operation and cheap price, so it is widely used.
4. Driefasige wisselstroommotoren - synchrone motoren
Synchronous motor.
If you let the rotor speed = stator magnetic field rotation speed, it becomes a synchronous motor, at this time it is necessary to turn the stator into an electromagnet or permanent magnet, that is, to energize the stator, at this time no longer need to cut the magnetic induction line can rotate, the rotation speed and magnetic field rotation speed is the same, that is, the formation of synchronous motor.
Synchronous motor rotor structure is more complex than asynchronous motors, high prices, in production life is not as widely used as asynchronous motors, mainly used as generators, now thermal power stations, hydroelectric power stations, steam turbines, hydraulic turbines are basically synchronous motors.
5. Driefasige AC-motor - snelheidsregeling van asynchrone elektromotoren
Asynchronous motor speed regulation: theoretically, asynchronous motor control AC frequency, voltage, or rotor resistance, motor pole distribution can be speed regulation, but in practice to achieve infinite speed regulation with the method of adjusting the frequency and voltage to achieve.
Because of the voltage regulation speed range is not large, generally can only be used in speed control requirements are not high occasions, the application is not widespread.
Variable frequency speed regulation: Speaking of frequency, we may have heard of it.
The full name of frequency conversion is Variable Voltage Variable Frequency (VVVF), which means that the voltage is changed when the frequency is changed, so that the speed range of asynchronous motor is large enough.
Frequency converters can be divided into two broad categories: AC-AC frequency converters and AC-DC frequency converters.
AC-DC inverter: AC power is directly transformed into AC power of another frequency by power electronics.
The maximum output frequency cannot exceed half of the input frequency, so it is generally used only in low speed, high capacity systems, and can eliminate the need for huge gear reducer.
AC-DC inverter will rectify the AC power into DC first, and then turn it into AC with controllable frequency and voltage through inverter, with PWM technology, this kind of inverter can realize a wide range of variable voltage and frequency.
For electric vehicles, the asynchronous motor is durable, strong overload capacity, and the control algorithm is so mature that it can be used completely.
6. Driefasige AC-motor - snelheidsregeling van synchrone motor
Synchronous motor speed regulation:
Synchronous machines have no turndown rate, and the control voltage cannot change the speed when the structure is determined, so before the appearance of frequency converters, synchronous motors were completely unregulated.
The appearance of frequency converter makes the AC synchronous motor also has a huge speed regulation range, because its rotor also has independent excitation (permanent magnet or electric excitation), its speed regulation range is wider than that of asynchronous motor, and the synchronous motor has been given a new life.
Synchronous motor variable voltage variable frequency speed control system can be divided into other-controlled variable speed control and self-controlled variable speed control.
For other-controlled variable frequency speed regulation, it is similar to the variable frequency regulation of asynchronous motor, which can be controlled by SVPWM and other control methods according to its mathematical model, and its performance is better than that of ordinary AC asynchronous motor.
Self-controlled inverter synchronous motor used to have a variety of names in the development process, such as commutatorless motor; when using permanent magnets and inputting three-phase sine wave, it can be called sine wave permanent magnet synchronous motor; and if inputting square wave, then it can be called trapezoidal wave permanent magnet synchronous motor, yes, it is similar to the previously said brushless DC machine (BLDM), we are not feeling a big circle of rap has turned Go back, but you must now have a deeper understanding of variable speed, so brushless DC motor when using DC input, but the use of synchronous motor frequency conversion technology (the same structure as the permanent magnet synchronous motor), in the Model3 on the use of DC brushless motor.
7. Eenfasige asynchrone AC-motor - eenfasige AC-serie-opgewonden motor (borstel)
Single-phase AC series-excited motor, commonly known as series-excited motor or universal motor (UniversalMotor foreign name, named because of AC and DC universal), the armature winding and excitation winding are connected in series to work together.
Single-phase series-excited motor is also called AC-DC dual-use series-excited motor, which can work with either AC power or DC power.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
The advantages of single-phase series-excited motor are that it has high speed, high starting torque, small size, light weight, not easy to block rotation, wide range of applicable voltage, and can be speed regulated by the method of voltage regulation, which is simple and easy to realize.
Therefore, it is widely used in power tools, such as angle grinder, hand drill, etc.
The structure of single-phase series-excited motor is very similar to that of DC series-excited motor, the main difference is that the stator core of single-phase series-excited motor must be made of silicon steel laminated, while the magnetic poles of DC can be made of both laminated and integral structure.
Single-phase series-excited motor speed regulation, most of the methods used to adjust the voltage, is to change the electric potential.
The voltage regulation method of single-phase series-excited motor uses controlled phase-shifting voltage regulation, which uses the trigger voltage of the SCR to lag behind the input voltage to achieve the phase-shifting trigger of the input voltage.
There are hardware and software methods in the implementation.
The regulated voltage method, using silicon controlled speed control technology, has a simple line, small size of components and other characteristics of a silicon controlled simple and effective method
(a) AC current variation curve;
(b) Rotation direction of the rotor when the current is positive half-wave
(c) Rotation direction of the rotor when the current is negative half-wave

8. Eenfasige asynchrone AC-motor - eenfasige AC-kooiankermotor (borstelloos)
Single-phase current through the armature winding produces a pulsating magnetic field rather than a rotating magnetic field, so single-phase asynchronous motors cannot be self-started.
To solve the starting problem, single-phase AC-powered asynchronous motors are often actually made to be two-phase.
The main winding is powered directly by the single-phase power supply; the secondary winding is spatially different from the main winding by 90° (electrical angle, equal to the mechanical angle divided by the number of motor pole pairs).
The secondary winding is connected to single-phase AC power supply after series connection of capacitor or resistor, so that the current passing through it and the current in the main winding have a certain phase difference.
This makes the synthetic magnetic field an elliptical rotating field, or perhaps even close to a circular rotating field.
The motor thus obtains starting torque.
The motor using resistance phase separation method is inexpensive, for example, the secondary winding can be wound with a thinner wire, but the phase separation effect is poor and energy is consumed in the resistance.
After the motor starts and reaches a certain speed, the secondary winding is usually removed automatically by a centrifugal switch mounted on the motor shaft to reduce the resistive losses and improve the operating efficiency.
It is generally used for the occasion that the starting torque requirement is not high, such as small lathe, small refrigerator, etc. The disadvantage is that the speed cannot be adjusted.
It is possible to make the synthetic magnetic field of the motor close to the circular rotating magnetic field at a certain working point of the motor, so as to obtain better working characteristics.
In order to make the split-phase asynchronous motor obtain better starting performance or better operating characteristics or both, the capacitance (amount of value) required is different and can be divided into three kinds
9. stappenmotoren - stappenmotoren met open lus
(Open-loop) stepper motors are open-loop controlled motors that convert electrical pulse signals into angular displacements, and are extremely widely used.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
The number of pulses can be controlled to control the amount of angular displacement, so as to achieve the purpose of accurate positioning; at the same time, the pulse frequency can be controlled to control the speed and acceleration of motor rotation, so as to achieve the purpose of speed regulation.
Stepper motor is a kind of induction motor, which works by using an electronic circuit, i.e., a driver, to turn DC power into a time-sharing powered multi-phase timing control current.
Although stepper motors are powered by DC current, they cannot be understood as DC motors, which are power motors that convert DC electrical energy into mechanical energy, while stepper motors are open-loop control motors that convert electrical pulse signals into angular displacement.
10. Vergelijking stappenmotor - stappenservo
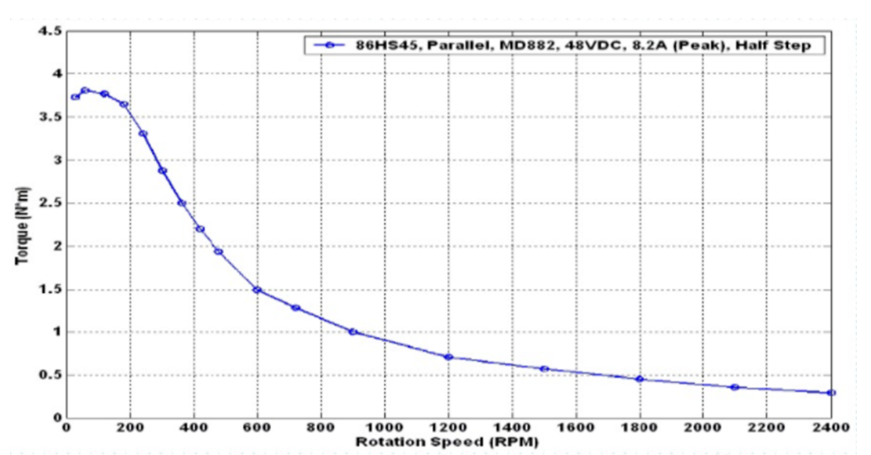
Note that stepper motors are used in low-speed applications - no more than 1000r/min per minute, the best working range is 150~500r/min, (closed-loop stepping up to 1500).
2 phase stepper motor at 60 ~ 70r/min is prone to low speed resonance phenomenon, generating vibration and noise, which needs to be avoided by changing the reduction ratio, increasing the fine fraction, adding magnetic dampers, etc.
Subdivision accuracy precautions, when the subdivision level is greater than 4, the accuracy of the step angle can not be guaranteed, high precision requirements, it is best to switch to more phases (i.e., smaller step angle) of the stepper motor or closed-loop stepper, servo motor.
(Open-loop) stepper motor and servo motor 7 different.
A control accuracy - servo motor control accuracy can be set according to the encoder, higher accuracy.
B low-frequency characteristics - stepper motors are prone to vibration at low frequencies, servo motors do not.
C moment-frequency characteristics - stepper motor torque becomes smaller with the increase in speed, so its maximum operating speed is generally in <1000r/min, servo motor in the rated speed (generally 3000r/min) can output the rated torque, in the rated speed above the constant power output, the maximum speed of up to 5000 r/min;.
D overload capacity - stepper motor can not be overloaded, servo motor maximum torque can be overloaded 3 times.
E operating performance - stepper motor for open-loop control, servo motor when closed-loop control.
F speed response - stepper motor start-up time 0.15 ~ 0.5s, servo motor 0.05 ~ 0.1, the fastest 0.01s to reach the rated 3000r / min.
G efficiency indicators - stepper motor efficiency of about 60%, servo motor about 80%.
In actual use will find: servo motor expensive, expensive out of many, so synchronous motors are more widely used, especially in the positioning accuracy requirements are not very high synchronous belt drive, flat belt conveyor and other occasions often use stepper motor.
11. Stappenmotoren - stappenmotoren met gesloten lus
Closed-loop stepper motors: In addition to open-loop stepper motors, there are stepper motors that have an encoder added to the end of the motor, allowing for closed-loop control.
Closed-loop control of stepper motors uses position feedback and/or velocity feedback to determine phase transitions appropriate to the rotor position, which can greatly improve the performance of stepper motors.
Servo systems without out-of-step phenomena.
Advantages of closed-loop stepper motors.
1. High speed response. Compared to suit motors, closed-loop stepper has very strong following of positioning commands, so the positioning time is very short. In the application of frequent start/stop, the positioning time can be significantly shortened.
2. Generate more torque than ordinary servo. Make up for the lack of step loss and low speed vibration of ordinary stepper system.
3. High torque can be generated even under 100% load, without loss of step operation, without considering torque loss and other problems like ordinary stepping systems.
4. By applying the closed-loop drive, the efficiency can be increased to 7.8 times, the output power can be increased to 3.3 times, and the speed can be increased to 3.6 times.
It can get higher running speed, more stable and smoother speed than open-loop control.
5. The stepper motor will be completely stationary when it stops, without the micro-vibration phenomenon of ordinary servo.
It can replace the application of general-purpose servo system when low cost and high precision positioning is required.
12. stappenmotor - stappenmotor servovergelijking met gesloten lus
Closed-loop stepper motors automatically adjust the winding current size according to the size of the load, heat and vibration is less than open-loop stepper, there is encoder feedback so the accuracy is higher than ordinary stepper motors, motor response than open-loop stepper slower than servo motors faster, there is a position error during operation, the error will gradually decrease in milliseconds after the command stops.
High-speed torque than open-loop stepper, common applications in the 0-1500rpm occasion.
In summary: closed-loop stepper motor with low cost, high efficiency, no jitter, no stop micro-vibration, high rigidity, no rectification, high speed, high dynamic response, etc., is the replacement of high-cost servo systems, low-end open-loop stepper systems and other cost-effective solutions
13. Servomotor - Algemene servomotor
Servo motor (servo motor), also called actuator motor, can make the control speed, position accuracy very accurate, can convert the voltage signal into torque and speed to drive the control object.
Unlike the principle structure of stepper motor, servo motor is a standard DC motor or AC induction motor because the control circuit is put outside the motor, and the motor part inside.
The servo motor relies on pulses for positioning. When the servo motor receives 1 pulse, it rotates by an angle corresponding to 1 pulse.
Every time the motor rotates an angle, the encoder will send out the corresponding number of feedback pulses. The feedback pulses and the pulses received by the servo driver form a closed-loop control, so that the servo driver can control the rotation of the motor very precisely to achieve precise positioning.
Servo motor control: Generally, servo motors for industrial use are controlled by three loops, namely current loop, speed loop and position loop, which can feedback the angular acceleration, angular speed and rotational position of the motor operation respectively.
The chip controls the drive current of each phase of the motor through the feedback of the three, so that the speed and position of the motor can run accurately as scheduled.
AC servo has the feature of constant torque under rated speed, common 200W,400W low and medium inertia AC servo rated speed is 3000rpm, the highest speed is 5000rpm, high speed.
The torque is proportional to the current, so it can work in the torque mode, such as locking screws, pressing terminals and other occasions that need constant torque.
AC servo work noise and vibration is very small, low heat generation.
The same volume of motor inertia rotor inertia is small, 400W servo inertia is only equivalent to the rotor inertia of 57 base 2NM stepper motor.
Servo has a short time overload capacity, the selection needs to consider the motor overload multiplier when acceleration and deceleration.
The servo uses closed-loop control and has the same position tracking error as a closed-loop stepper.
Servo requires commissioning before use.
The original torque of the stepper and servo motor is not enough, often need to work with the reducer, you can use the reduction gear set or planetary reducer.
6. Servo motor - servo
Servo is a class of DC servo motor, first used for small airplane models and now used for small robot joints.
From the structural analysis, a servo consists of a small DC motor, plus sensors, control chips, and reduction gear sets, which are mounted into an integrated housing.
It is able to control the rotation angle through an input signal (usually a PWM signal, but also a digital signal).
Since it is a simplified version, the original three-loop control of the servo motor is simplified to one loop, i.e., only the position loop is detected.
A cheap solution is a potentiometer, which is detected by a resistor, while an advanced solution will use a Hall sensor, or an encoder.
General servos are inexpensive and compact, but have very low accuracy and poor position calming capability, and can meet many low-end needs.
With the boom of consumer-grade small robots in the last two years, small and lightweight servos have instantly become the most suitable joint components.
However, robot joints require much higher performance than aerial servos, and as a commercial product also require much higher quality servos than DIY players.
Welcome to share with us more information about electric motors in the comments area!
Any inquiry about electric motor, please contact the professional electric motor fabrikant in China as follows:

Dongchun -motor heeft een breed scala aan elektrische motoren die worden gebruikt in verschillende industrieën, zoals transport, infrastructuur en constructie.
Krijg een snel antwoord.






