 အကြောင်းအရာသို့ ကျော်သွားပါ။
အကြောင်းအရာသို့ ကျော်သွားပါ။ 
ကမ္ဘာ့လျှပ်စစ်ဓာတ်အားသုံးစွဲမှု၏ထက်ဝက်နီးပါးသည်လျှပ်စစ်မော်တာများကလျှပ်စစ်မောင်နှုတ်ချက်များကသုံးစွဲသည်။
ပုံစံ လျှပ်စစ်မော်တာများ
ယေဘူယျအားဖြင့်၊ ၎င်းသည် သံလိုက်စက်ကွင်းအတွင်း လည်ပတ်စီးဆင်းမှုမှ ထုတ်ပေးသော တွန်းအားကို rotary action အဖြစ်သို့ အသွင်ပြောင်းခြင်းကို ရည်ညွှန်းပြီး ကျယ်ပြန့်သော အကွာအဝေးတွင်၊ ၎င်းတွင် linear action လည်း ပါဝင်ပါသည်။
မော်တာမောင်းနှင်ရာတွင် အသုံးပြုသည့် ပါဝါထောက်ပံ့မှု အမျိုးအစားပေါ်မူတည်၍ DC မော်တာများနှင့် ရှိပါသည်။ AC လျှပ်စစ်မော်တာများ.
မော်တာလည်ပတ်ခြင်းနိယာမအရ၊ ၎င်းကို အောက်ပါအမျိုးအစားများအဖြစ် အကြမ်းဖျင်းခွဲခြားနိုင်သည်။ (အထူးမော်တာများမှလွဲ၍)
DC လျှပ်စစ်မော်တာ / DC (တိုက်ရိုက်လက်ရှိ) မော်တာ
Brushed Motors များ
အသုံးများသော စုတ်တံမော်တာများကို ယေဘုယျအားဖြင့် DC လျှပ်စစ်မော်တာဟုခေါ်သည်။
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Brushless DC မော်တာ
Brushless DC မော်တာများသည် ဘရက်ရှ်များ သို့မဟုတ် ကွန်မြူတာတာများကို အသုံးမပြုသော်လည်း လက်ရှိကိုပြောင်းကာ လည်ပတ်မှုလုပ်ဆောင်ရန်အတွက် ထရန်စစ္စတာကဲ့သို့သော switching function ကိုအသုံးပြုပါ။
Stepper မော်တာ
ဤမော်တာသည် သွေးခုန်နှုန်းပါဝါနှင့် တပြိုင်တည်းအလုပ်လုပ်သောကြောင့် Pulse induction motor ဟုခေါ်သည်။
၎င်းသည် တိကျသော နေရာချထားခြင်းဆိုင်ရာ လုပ်ဆောင်ချက်ကို လွယ်ကူစွာ ရရှိရန် စွမ်းရည်ဖြင့် ထူးခြားချက်ဖြစ်သည်။
AC မော်တာများ
Asynchronous မော်တာ
AC ပါဝါသည် stator တွင်လည်ပတ်နေသောသံလိုက်စက်ကွင်းကိုထုတ်ပေးသည်၊ ၎င်းသည် ac induction motor အတွက်အပြန်အလှန်လည်ပတ်မှုဖြစ်ပေါ်သည့်အတွက် rotor အတွင်းရှိ induced current ကိုထုတ်ပေးသည်။
Synchronous မော်တာ
AC ပါဝါသည် လည်ပတ်သံလိုက်စက်ကွင်းကို ဖန်တီးပေးပြီး သံလိုက်ဝင်ရိုးများပါသော ရဟတ်များသည် ဆွဲဆောင်မှုကြောင့် လှည့်ပတ်သည်။
- လည်ပတ်မှု၏အမြန်နှုန်းသည် ပါဝါထောက်ပံ့မှု၏ကြိမ်နှုန်းနှင့် ကံကောင်းထောက်မစွာ ထပ်တူပြုပါသည်။
ရေစီးကြောင်းများ၊ သံလိုက်စက်ကွင်းများနှင့် စွမ်းအားများအကြောင်း
ပထမ ဦး စွာနောက်ဆက်တွဲမော်တာအခြေခံနိယာမရှင်းလင်းချက်များကြောင့်လက်ရှိ, သံလိုက်စက်ကွင်းနှင့်အင်အားနှင့်ပတ်သက်သောအခြေခံဥပဒေ / ဥပဒေများကိုပြန်လည်သုံးသပ်ကြပါစို့။
လွမ်းဆွတ်ခြင်း ခံစားချက်ရှိသော်လည်း သံလိုက်ဓာတ် အစိတ်အပိုင်းများကို အများအားဖြင့် အသုံးမပြုပါက ဤအသိပညာကို မေ့ပစ်ရန် လွယ်ကူသည်။
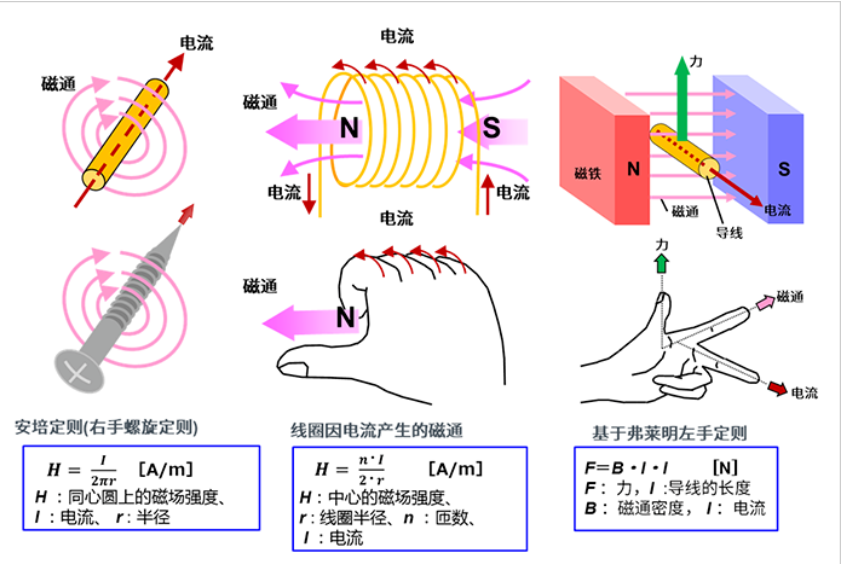
ပုံများနှင့် ဖော်မြူလာများကို သရုပ်ဖော်ရန် ကျွန်ုပ်တို့ ပေါင်းစပ်ထားပါသည်။
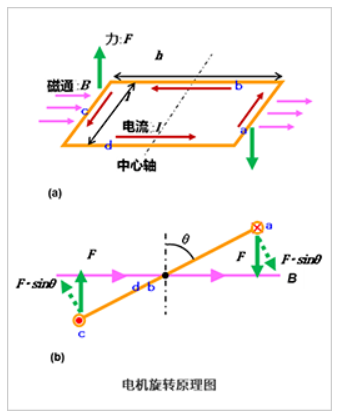
ဝါယာဘောင်သည် ထောင့်မှန်စတုဂံဖြစ်သောအခါ၊ လျှပ်စီးကြောင်းအပေါ် သက်ရောက်သည့် အင်အားကို ထည့်သွင်းစဉ်းစားသည်။
F သည် a နှင့် c ၏ အစိတ်အပိုင်းများပေါ်တွင် သက်ရောက်သည်။
torque ကို ဗဟိုဝင်ရိုးအဖြစ် ဗဟိုဝင်ရိုးဖြင့် ထုတ်ပေးသည်။
ဥပမာအားဖြင့်၊ လည်ပတ်ထောင့်သည် θ သာရှိသော အခြေအနေတစ်ခုကို သုံးသပ်သောအခါ၊ ထောင့်မှန်တွင် b နှင့် d တို့အား သက်ရောက်စေသော အင်အားသည် sinθ ဖြစ်သောကြောင့် အစိတ်အပိုင်းတစ်ခု၏ ရုန်းအား Ta အား ပေးသည်-
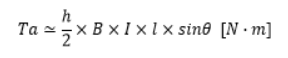
အပိုင်း c ကို တူညီသောနည်းဖြင့် ထည့်သွင်းစဉ်းစားခြင်းဖြင့် torque သည် နှစ်ဆတိုးလာပြီး အောက်ပါညီမျှခြင်းဖြင့် တွက်ချက်ထားသော torque ကိုထုတ်ပေးသည်။

ထောင့်မှန်စတုဂံ၏ ဧရိယာသည် S = h・l ဖြစ်သောကြောင့်၊ ၎င်းကို အထက်ပါညီမျှခြင်းတွင် အစားထိုးခြင်းဖြင့် အောက်ပါရလဒ်ကို ရရှိစေပါသည်။

ဖော်မြူလာသည် ထောင့်မှန်စတုဂံများသာမက စက်ဝိုင်းများကဲ့သို့သော အခြားဘုံပုံစံများနှင့်လည်း သက်ဆိုင်ပါသည်။ မော်တာသည် ဤသဘောတရားကို အသုံးပြုသည်။
လျှပ်စစ်မော်တာ ဘယ်လိုလည်ပတ်သလဲ
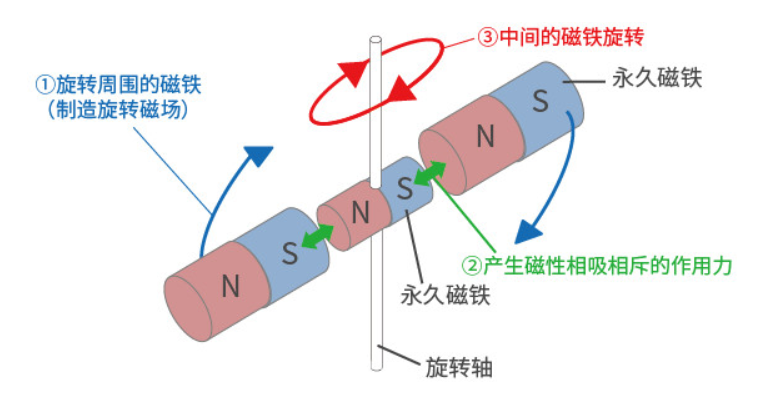
1) induction မော်တာများသည် သံလိုက်နှင့် သံလိုက်စွမ်းအားများ၏ အကူအညီဖြင့် လှည့်ပတ်သည်။
အမြဲတမ်း သံလိုက်ဖြင့် လှည့်ပတ်ထားသော ရိုးတံ၊
① သံလိုက်ကို လှည့်သည် (သို့မှသာ လှည့်နေသော သံလိုက်စက်ကွင်းကို ထုတ်ပေးသည်)၊
② နိယာမအရ N နှင့် S တို့သည် မတူညီသော ဝင်ရိုးစွန်းများတွင် တစ်ခုနှင့်တစ်ခု ဆွဲဆောင်ပြီး တူညီသောအဆင့်တွင် အချင်းချင်း တွန်းလှန်ခြင်း၊
③ rotating shaft ပါသော သံလိုက်သည် လည်ပတ်နေမည်ဖြစ်ပါသည်။
ဤသည်မှာ AC မော်တာလည်ပတ်ခြင်း၏ အခြေခံနိယာမဖြစ်သည်။
conductor တွင် စီးဆင်းနေသော လက်ရှိ လည်ပတ်နေသော သံလိုက်စက်ကွင်း (magnetic force) ကို ဖြစ်ပေါ်စေပြီး သံလိုက်သည် လည်ပတ်နေသည်၊ ၎င်းသည် လက်တွေ့အားဖြင့် ၎င်းနှင့် တူညီသော လုပ်ဆောင်ချက် အခြေအနေ ဖြစ်သည်။
ထို့အပြင် ဝါယာကြိုးသည် ကွိုင်ပုံသဏ္ဍာန်တွင် ဒဏ်ရာရှိသောအခါ၊ သံလိုက်စွမ်းအားကို ပေါင်းစပ်ပြီး N နှင့် S ဝင်ရိုးများကို ထုတ်ပေးသည့် ကြီးမားသော သံလိုက်စက်ကွင်း flux (flux) ကို ဖန်တီးသည်။
ထို့အပြင်၊ ကွိုင်ကဲ့သို့ ဝါယာကြိုးအတွင်းသို့ သံအူတိုင်ကို ထည့်သွင်းခြင်းဖြင့်၊ သံလိုက်ဓာတ်အား ဖြတ်သန်းရလွယ်ကူပြီး ပိုမိုအားကောင်းသော သံလိုက်စွမ်းအားကို ထုတ်ပေးနိုင်သည်။
2) အမှန်တကယ်လည်ပတ်နေသောမော်တာ
ဤတွင်၊ လည်ပတ်မော်တာ၏လက်တွေ့ကျသောနည်းလမ်းတစ်ခုအနေဖြင့်၊ ကျွန်ုပ်တို့သည် အဆင့်သုံးဆင့် AC မော်တာနှင့် ကွိုင်များကို အသုံးပြု၍ လည်ပတ်သံလိုက်စက်ကွင်းဖန်တီးသည့်နည်းလမ်းကို မိတ်ဆက်ပေးပါသည်။
(အဆင့်သုံးဆင့် AC စက်မှုမော်တာများသည် အဆင့်တွင် 120° ခြား၍ AC အချက်ပြမှုတစ်ခုဖြစ်သည်။
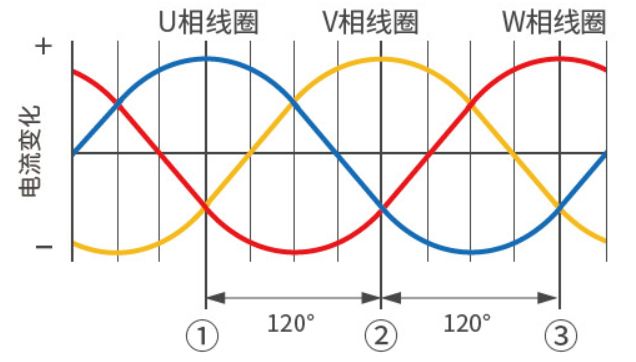
အထက်ဖော်ပြပါ ① ပြည်နယ်ရှိ ဓာတုသံလိုက်စက်ကွင်းသည် အောက်ပါပုံ ① နှင့် ကိုက်ညီပါသည်။
အထက် ② ပြည်နယ်ရှိ ဓာတုသံလိုက်စက်ကွင်းသည် အောက်ပါပုံ ② နှင့် ကိုက်ညီသည်။
အထက် ③ ပြည်နယ်ရှိ ဓာတုသံလိုက်စက်ကွင်းသည် အောက်ပါပုံ ③ နှင့် ကိုက်ညီသည်။
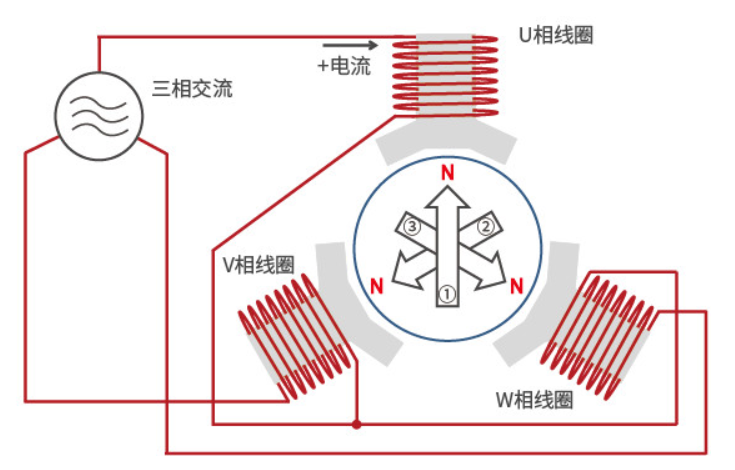
အထက်တွင်ဖော်ပြခဲ့သည့်အတိုင်း အနာအူတိုင်၏ ကွိုင်များကို 120° ကြားကာလဖွဲ့စည်းမှုဖြင့် U-phase coils၊ V-phase coils နှင့် W-phase coils ဖြင့် ကွိုင်အား ဗို့အားမြင့်ထုတ်လုပ်သော N-pole ဖြင့်လည်းကောင်း၊ S-pole ဖြင့် ဗို့အားနိမ့်သော ကွိုင်။

အဆင့်တစ်ခုစီသည် sine wave အရ ပြောင်းလဲသွားသောကြောင့် polarity (N pole, S pole) နှင့် coil တစ်ခုစီမှထုတ်ပေးသော သံလိုက်စက်ကွင်း (magnetic force) တို့သည် ပြောင်းလဲသွားမည်ဖြစ်သည်။
ဤအချိန်တွင်၊ N pole တစ်ခုတည်းကိုထုတ်လုပ်သော ကွိုင်သည် U-phase coil → V-phase coil → W-phase coil → U-phase coil အရ ဆက်တိုက်ပြောင်းလဲသွားသောကြောင့် လည်ပတ်မှုဖြစ်ပေါ်ပါသည်။

သေးငယ်သောမော်တာ၏ဖွဲ့စည်းပုံ
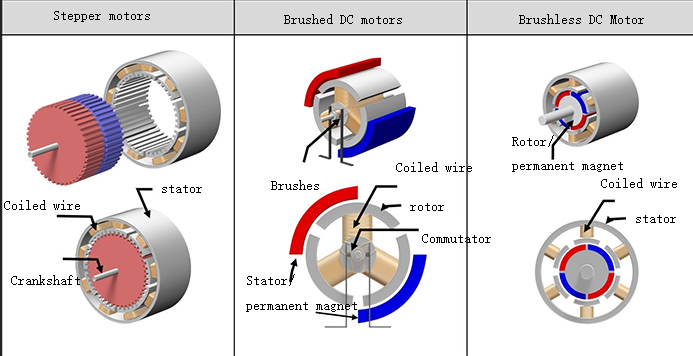
အောက်ဖော်ပြပါပုံသည် စက်မှုမော်တာ အမျိုးအစားသုံးမျိုး၏ အကြမ်းဖျင်းဖွဲ့စည်းပုံနှင့် နှိုင်းယှဉ်ချက်ကို ပေးသည်- stepper motors, brushed DC (DC) motors, and brushless DC (DC) motors.
ဤမော်တာများ၏ အခြေခံ အစိတ်အပိုင်းများသည် အဓိကအားဖြင့် ကွိုင်များ၊ သံလိုက်များနှင့် ရဟတ်များဖြစ်ပြီး အမျိုးအစားပေါ်မူတည်၍ ကွိုင်-ပုံသေနှင့် သံလိုက်-ပုံသေအမျိုးအစားများလည်း ရှိပါသည်။
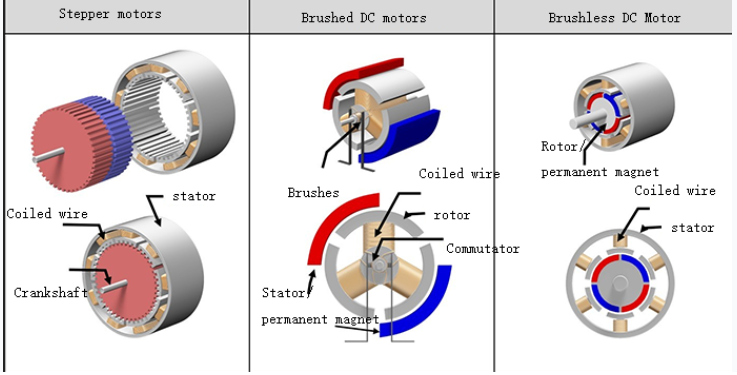
အောက်ဖော်ပြပါသည် နမူနာပုံကားချပ်နှင့် ဆက်စပ်နေသော ဖွဲ့စည်းပုံ၏ ဖော်ပြချက်ဖြစ်သည်။ ပိုမိုသေချာစွာ ပိုင်းခြားထားလျှင် အခြားဖွဲ့စည်းပုံများ ရှိနိုင်သောကြောင့် ဤစာတမ်းတွင် တင်ပြထားသော ဖွဲ့စည်းပုံသည် ကြီးမားသောဘောင်အောက်တွင် ရှိနေကြောင်း ကျေးဇူးပြု၍ နားလည်ပါ။
ဤနေရာတွင် stepper motor ၏ကွိုင်ကို အပြင်ဘက်တွင် တပ်ဆင်ထားပြီး သံလိုက်အား အတွင်းဘက်တွင် လှည့်ထားသည်။
ဤနေရာတွင် brushed DC မော်တာ၏ သံလိုက်အား အပြင်ဘက်တွင် တပ်ဆင်ထားပြီး ကွိုင်သည် အတွင်းဘက်တွင် လှည့်နေသည်။ T
သူသည် brushes နှင့် commutator သည် coil သို့ power ပေးဆောင်ရန်နှင့် current ၏ ဦးတည်ချက်ကို ပြောင်းလဲရန်အတွက် တာဝန်ရှိသည်။
brushless motor တွင် coil သည် အပြင်ဘက်တွင် fixed ဖြစ်ပြီး magnet သည် အတွင်းဘက်တွင် လှည့်ပါသည်။
မော်တာအမျိုးအစားအမျိုးမျိုးကြောင့် အခြေခံအစိတ်အပိုင်းများသည် တူညီသော်လည်း brushless motor ၏ဖွဲ့စည်းပုံမှာ ကွဲပြားပါသည်။ အသေးစိတ်ကို ကဏ္ဍတစ်ခုချင်းစီတွင် ရှင်းပြပေးပါမည်။
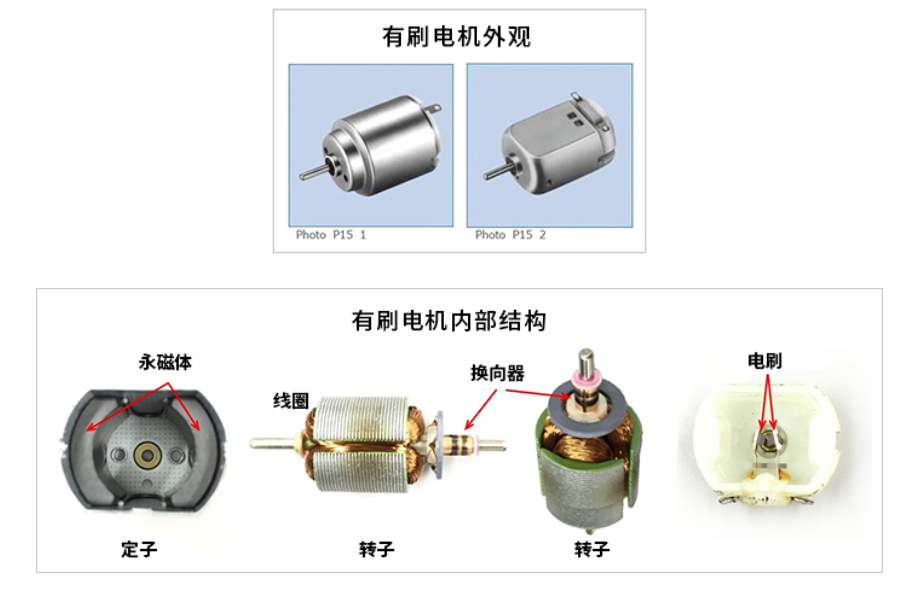
စုတ်တံမော်တာ
brushed DC မော်တာများ၏ဖွဲ့စည်းပုံ
အောက်တွင် မော်ဒယ်များတွင် အသုံးပြုလေ့ရှိသော brushed DC မော်တာ၏ အသွင်အပြင်နှင့် ပုံမှန်နှစ်ဝင်ရိုးစွန်း (2 သံလိုက်) သုံးချောင်း (3 ကွိုင်) အမျိုးအစား မော်တာ၏ ပြိုကွဲမှုဆိုင်ရာ ပုံသဏ္ဍာန် ဇယားကွက်များဖြစ်သည်။ dc လျှပ်စစ်မော်တာကို တပ်ဆင်ခြင်းနှင့် သံလိုက်များကို ထုတ်ယူခြင်း အတွေ့အကြုံများစွာ ရှိကောင်းရှိနိုင်သည်။
Brushed DC မော်တာ၏ အမြဲတမ်းသံလိုက်များကို ပြုပြင်ထားပြီး၊ brushed DC မော်တာ၏ ကွိုင်များသည် အတွင်းပိုင်းအလယ်ဗဟိုတွင် လှည့်ပတ်နိုင်သည်။
The fixed side is called the "stator" and the rotating side is called the "rotor".
အောက်ဖော်ပြပါပုံသည် တည်ဆောက်ပုံ သဘောတရားကို ကိုယ်စားပြုသည့် structural sketch ဖြစ်သည်။
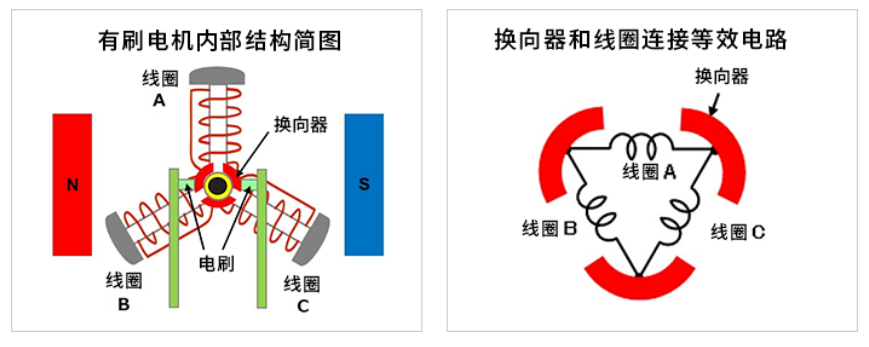
လှည့်နေသော ဗဟိုဝင်ရိုး၏ အစွန်အဖျားတွင် ကွန်မြူတာတာ (၃) ခု ပါရှိသည်။
တစ်ဦးနှင့်တစ်ဦး ထိတွေ့မှုကို ရှောင်ရှားရန်၊ ရွေ့ပြောင်းကိရိယာများကို 120° ခြားပြီး (360° ÷ 3 အပိုင်းပိုင်း) တွင် စီစဉ်ထားသည်။ ကွန်မြူတာများသည် ရိုးတံ၏လှည့်ခြင်းဖြင့် လှည့်သည်။
ကွန်မြူတာတာတစ်ခုသည် ကွိုင်အဆုံးတစ်ခုနှင့် အခြားကွိုင်အဆုံးကို ချိတ်ဆက်ထားပြီး ကွန်မြူတာတာသုံးခုနှင့် ကွိုင်သုံးခုတို့သည် ဆားကစ်ကွန်ရက်တစ်ခုအဖြစ် (ring) တစ်ခုလုံးကို ဖွဲ့စည်းသည်။
ကွန်မြူတာတာနှင့် အဆက်အသွယ်ပြုလုပ်ရန် စုတ်တံနှစ်ခုကို 0° နှင့် 180° တွင် ပြင်ဆင်ထားသည်။
ပြင်ပ DC ပါဝါထောက်ပံ့မှုသည် ဘရိတ်များနှင့် ချိတ်ဆက်ထားပြီး လမ်းကြောင်း ဘရပ်ရှ် → ကွန်မြူတာတာ → ကွိုင် → ဘရပ်ရှ်ရှိ လက်ရှိစီးဆင်းသည်။
brush dc မော်တာ၏လှည့်ခြင်းနိယာမ
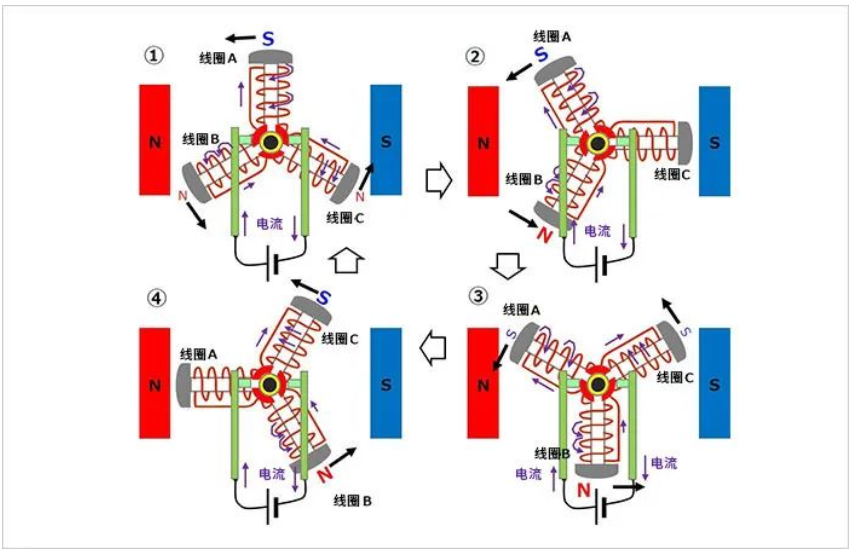
① မူလအခြေအနေမှ နာရီလက်တံပြန်လှည့်ပါ။
Coil A သည် အပေါ်ဆုံးတွင်ရှိပြီး ပါဝါကိရိယာများကို စုတ်တံများနှင့် ချိတ်ဆက်ကာ ဘယ်ဘက်ခြမ်းကို (+) နှင့် ညာဘက်ခြမ်း (-) အဖြစ် သတ်မှတ်သည်။
ကြီးမားသောလျှပ်စီးကြောင်းတစ်ခုသည် ဘယ်ဘက်ဘရက်ရှ်မှ ကွန်မြူတာတာမှတဆင့် ကွိုင် A သို့ စီးဆင်းသည်။
ဤသည်မှာ ကွိုင် A ၏ အပေါ်ပိုင်း (အပြင်ဘက်) သည် S တိုင် ဖြစ်လာသည့် ဖွဲ့စည်းပုံ ဖြစ်သည်။
ကွိုင် A မှ လျှပ်စီးကြောင်း၏ 1/2 သည် ဘယ်ဘက် ဘရပ်ရှမှ ကွိုင် A ၏ ဆန့်ကျင်ဘက်ဦးတည်ချက်တွင် ကွိုင် B နှင့် C သို့ စီးဆင်းသွားသဖြင့် ကွိုင် B နှင့် C ၏ အပြင်ဘက်ခြမ်းများသည် N-poles များ အားနည်းသွားသည် (အက္ခရာအသေးလေးများဖြင့် ဖော်ပြထားသည် ။ ပုံ)။
ဤကွိုင်များတွင် ထုတ်ပေးသော သံလိုက်စက်ကွင်းများနှင့် သံလိုက်များ၏ ရွံရှာဖွယ် ဆွဲဆောင်မှုရှိသော အကျိုးသက်ရောက်မှုများသည် ကွိုင်များကို နာရီလက်တံဖြင့် တန်ပြန်လှည့်နေသော တွန်းအားတစ်ခုအဖြစ် သက်ရောက်စေသည်။
② နောက်ထပ် လက်ယာရစ် လှည့်ခြင်း။
ထို့နောက်၊ ညာဘက်ဘရက်ရှ်သည် ကွိုင် A ကို 30° တန်ပြန်လှည့်သည့် အခြေအနေတွင် ကွန်မြူတာတာနှစ်ခုလုံးနှင့် ထိတွေ့နေသည်ဟု ယူဆပါ။
ကွိုင် A ၏ လျှပ်စီးကြောင်းသည် ဘယ်ဘက်ဘရက်ရှ်မှ ညာဘက်ဘရက်ရှ်မှတဆင့် အဆက်မပြတ်စီးဆင်းပြီး ကွိုင်၏အပြင်ဘက်ခြမ်းသည် S-pole တည်ရှိနေပါသည်။
ကွိုင် A ကဲ့သို့ တူညီသော လျှပ်စီးကြောင်းသည် ကွိုင် B မှတဆင့် စီးဆင်းပြီး ကွိုင် B ၏ အပြင်ဘက်ခြမ်းသည် N-pole အားကောင်းလာသည်။
coil C ၏ အဆုံးများကို စုတ်တံများဖြင့် တိုသွားသောကြောင့်၊ လက်ရှိ စီးဆင်းမှု နှင့် သံလိုက်စက်ကွင်း ထုတ်ပေးခြင်း မရှိပါ။
ဤကိစ္စတွင်ပင်၊ လက်ယာရစ်ပြန်လှည့်သည့် အင်အားလည်း ရှိသည်။
အပေါ်ဘက်ရှိ ကွိုင်အား ③ မှ ④ အထိ ဘယ်ဘက်သို့ ရွေ့လျားနေသည့် တွန်းအားကို စဉ်ဆက်မပြတ် ချထားပြီး အောက်ကွိုင်သည် ညာဘက်သို့ ရွေ့လျားနေသည့် တွန်းအားကို စဉ်ဆက်မပြတ် ချထားကာ နာရီလက်တံအတိုင်း ဆက်လက် လည်ပတ်နေပါသည်။
ကွိုင်သည် 30° မှ ③ နှင့် ④ တိုင်း လှည့်သောအခါ၊ ကွိုင်သည် ဗဟိုအလျားလိုက်ဝင်ရိုးအထက်တွင် ကွိုင်၏ အပြင်ဘက်ခြမ်းသည် S တိုင် ဖြစ်လာသည်။ ကွိုင်အောက်ရောက်သောအခါ၊ ၎င်းသည် N pole ဖြစ်လာပြီး ရွေ့လျားမှုကို ထပ်ခါတလဲလဲ ပြုလုပ်သည်။
တစ်နည်းအားဖြင့်ဆိုရသော် အပေါ်ကွိုင်အား ဘယ်ဘက်သို့ ရွေ့လျားနေသော တွန်းအားကို ထပ်ခါတလဲလဲ ချထားပြီး အောက်ကွိုင်အား ညာဘက်သို့ ရွေ့လျားနေသော တွန်းအားအား ထပ်ခါတလဲလဲ ချထားသည် (လက်ယာရစ် နှစ်ဘက်စလုံးအား)။ ၎င်းသည် ရဟတ်အား အချိန်တိုင်း နာရီလက်တံအတိုင်း လှည့်စေသည်။
ပါဝါအား ဆန့်ကျင်ဘက်ဘယ်ဘက်ဘရက်ရှ် (-) နှင့် ညာဘရပ်ရှ် (+) နှင့် ချိတ်ဆက်ထားပါက သံလိုက်စက်ကွင်းကို ကွိုင် stator အကွေ့အကောက်များအတွင်း ဆန့်ကျင်ဘက်ဦးတည်ချက်ဖြင့် ထုတ်ပေးသောကြောင့် ကွိုင်သို့သက်ရောက်သောတွန်းအားသည် ဆန့်ကျင်ဘက်ဦးတည်ရာသို့ ရွေ့လျားပြီး နာရီလက်တံအတိုင်း လည်ပတ်မှုဖြစ်လာသည်။ .
ထို့အပြင်၊ ပါဝါချိတ်ဆက်မှု ပြတ်တောက်သွားသောအခါ၊ ပွတ်တိုက်ထားသော မော်တာ၏ ရဟတ်သည် ၎င်းကို လည်ပတ်နေစေသော သံလိုက်စက်ကွင်းမှ ကင်းစင်သွားသောကြောင့် ၎င်းသည် လည်ပတ်မှု ရပ်သွားပါသည်။
Three-phase full-wave brushless မော်တာ
သုံးဆင့်အပြည့် လှိုင်းစုတ်တံမပါသော မော်တာ၏ အသွင်အပြင်နှင့် ဖွဲ့စည်းပုံ
အောက်ဖော်ပြပါပုံသည် brushless motor ၏ အသွင်အပြင်နှင့် တည်ဆောက်ပုံကို နမူနာပြထားသည်။
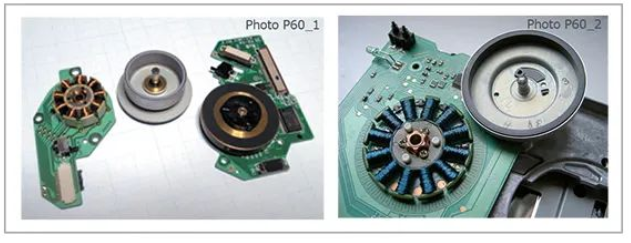
ဘယ်ဘက်တွင် disc ကိုဖွင့်စက်တွင် disc တစ်ခုကိုလှည့်ရန်အသုံးပြုသည့် spindle motor ၏ဥပမာတစ်ခုဖြစ်သည်။ အဆင့်သုံးဆင့် x 3 ၏ 9 ကွိုင်များ ရှိသည်။ ညာဘက်တွင် ကွိုင် 12 ခုပါသော FDD စက်အတွက် ဗိုင်းလိပ်တံမော်တာ ဥပမာတစ်ခုဖြစ်သည်။ ကွိုင်များကို ဘုတ်ပေါ်တွင် တပ်ဆင်ထားပြီး အူတိုင်ပေါ်တွင် ဒဏ်ရာရှိသည်။
ကွိုင်၏ညာဘက်ခြမ်းရှိ ဒစ်ပုံသဏ္ဍာန်အပိုင်းသည် အမြဲတမ်းသံလိုက်ရဟတ်ဖြစ်သည်။ ရဟတ်ရှပ်ကို ကွိုင်၏အလယ်ဗဟိုတွင် ထည့်သွင်းပြီး ကွိုင်အစိတ်အပိုင်းကို ဖုံးအုပ်ထားပြီး အမြဲတမ်းသံလိုက်များသည် ကွိုင်၏အစွန်ကို ဝန်းရံထားသည်။
သုံးဆင့်အပြည့်-လှိုင်းစုတ်တံမရှိသောမော်တာ၏အတွင်းပိုင်းဖွဲ့စည်းပုံနှင့် coil ချိတ်ဆက်မှု၏ညီမျှသောဆားကစ်၊
နောက်တစ်ခုကတော့ အတွင်းပိုင်းတည်ဆောက်ပုံနဲ့ coil ချိတ်ဆက်မှုရဲ့ တူညီတဲ့ circuit ကို ပုံကြမ်းပါ။
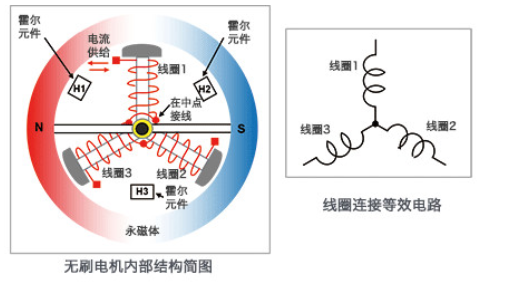
ဤအတွင်းပိုင်းဖွဲ့စည်းပုံပုံကြမ်းသည် အလွန်ရိုးရှင်းသောဖွဲ့စည်းပုံပါရှိသော 2-pole (2 သံလိုက်) 3-slot (3 coils) motor ၏ ဥပမာတစ်ခုဖြစ်သည်။ ၎င်းသည် တူညီသော ဝင်ရိုးစွန်းများနှင့် အပေါက်များပါရှိသော brushed motor ၏ တည်ဆောက်ပုံနှင့် ဆင်တူသော်လည်း coil side သည် fixed ဖြစ်ပြီး သံလိုက်များကို လှည့်နိုင်သည်။ ဟုတ်ပါတယ်၊ စုတ်တံတွေ မရှိပါဘူး။
ဤကိစ္စတွင်၊ ကွိုင်များကို Y-ပုံသဏ္ဍာန်ဖြင့် ချိတ်ဆက်ထားပြီး လည်ပတ်သံလိုက်များ၏ အနေအထားအရ ကွိုင်များသို့ လျှပ်စီးကြောင်းကို ထောက်ပံ့ပေးရန်အတွက် တစ်ပိုင်းလျှပ်ကူးပစ္စည်းကို အသုံးပြုပါသည်။
ဤဥပမာတွင်၊ သံလိုက်၏အနေအထားကိုသိရှိရန် Hall element ကိုအသုံးပြုသည်။ သံလိုက်စက်ကွင်းအား ခိုင်ခံ့မှုအပေါ် အခြေခံ၍ ထုတ်ပေးသော ဗို့အားကို သိရှိနိုင်ရန် Hall element ကို ကွိုင်နှင့် ကွိုင်ကြားတွင် ပုံဖော်ထားပါသည်။ အစောပိုင်းကပေးထားသည့် FDD spindle motor ၏ပုံတွင်၊ coil နှင့် coil (ကွိုင်အထက်) အကြားတည်နေရာကိုသိရှိရန်အသုံးပြုသည့် Hall ဒြပ်စင်ကိုလည်းတွေ့နိုင်သည်။
Hall element များကို သံလိုက်အာရုံခံကိရိယာများအဖြစ် လူသိများသည်။
၎င်းသည် သံလိုက်စက်ကွင်း၏ ပြင်းအားကို ဗို့အား၏ပြင်းအားအဖြစ်သို့ ပြောင်းလဲနိုင်ပြီး သံလိုက်စက်ကွင်း၏ ဦးတည်ချက်ကို အပြုသဘော သို့မဟုတ် အနုတ်သဘောဆောင်သော ဝေါဟာရများဖြင့် ညွှန်ပြနိုင်သည်။
အောက်တွင် Hall effect ကိုပြသသည့် diagram တစ်ခုဖြစ်သည်။
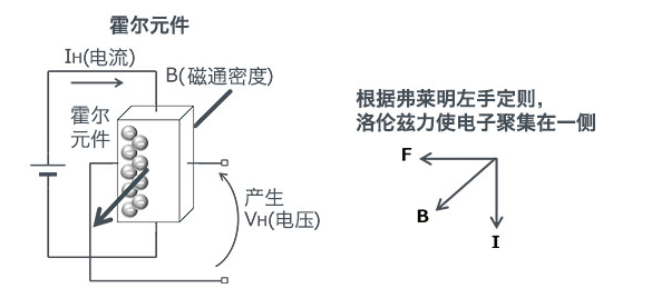
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
ရရှိလာသော ဗို့အား VH ကို အောက်ပါညီမျှခြင်းဖြင့် ဖော်ပြသည်။
VH = (KH / d)・IH・B ※KH- Hall coefficient၊ d- flux ထိုးဖောက်မှုမျက်နှာပြင်၏ အထူ
ဖော်မြူလာတွင် ပြထားသည့်အတိုင်း၊ လျှပ်စီးကြောင်း မြင့်လေ၊ ဗို့အား ပိုမြင့်လေ ဖြစ်သည်။ ရိုတာ (သံလိုက်) ၏ တည်နေရာကို သိရှိရန် ဤပိုင်ဆိုင်မှုကို မကြာခဏ အသုံးပြုသည်။
သုံးဆင့်အပြည့်-လှိုင်းစုတ်တံမရှိသော မော်တာ၏ လှည့်ခြင်းနိယာမ
brushless motor ၏လည်ပတ်မှုနိယာမကို အောက်ပါအဆင့်များ ① မှ ⑥ အထိ ရှင်းပြပါမည်။ နားလည်လွယ်စေရန်အတွက် အမြဲတမ်းသံလိုက်အား ဤနေရာတွင် စက်ဝိုင်းမှ စတုဂံတစ်ခုသို့ ရိုးရှင်းအောင်ပြုလုပ်ထားသည်။
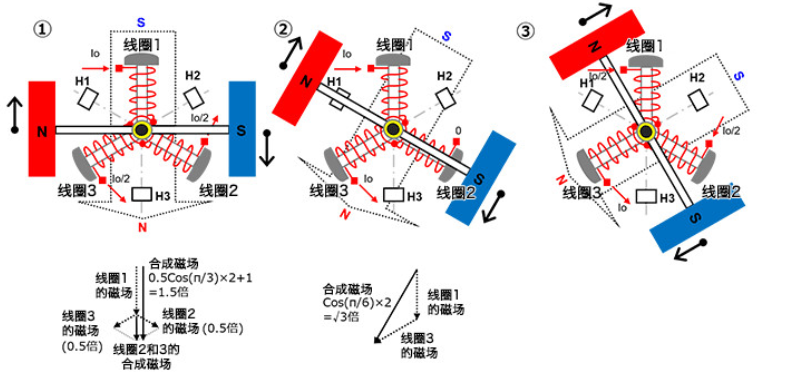
①
3-phase coil တွင်ကွိုင် 1 ကို 12 နာရီနာရီတွင်သတ်မှတ်ထားပါစေ။ 2 တိုင်အမြဲတမ်းသံလိုက်၏ N-polet ၏လက်ဝဲဘက်ခြမ်းနှင့်ညာဘက်ခြမ်းတွင် S-Speele နှင့် rotatable ။
ကွိုင်၏အပြင်ဘက်ရှိ S-pole သံလိုက်စက်ကွင်းကို ထုတ်လုပ်ရန်အတွက် လက်ရှိ Io ကို ကွိုင် 1 သို့ စီးဆင်းစေသည်။ ကွိုင်၏အပြင်ဘက်ရှိ N-pole သံလိုက်စက်ကွင်းကို ထုတ်လုပ်ရန်အတွက် လက်ရှိ Io/2 ကို ကွိုင် 2 နှင့် ကွိုင် 3 တို့မှ စီးဆင်းပါစေ။
ကွိုင် 2 နှင့် 3 ၏ သံလိုက်စက်ကွင်းများကို vector ဖြင့်ပေါင်းစပ်သောအခါ၊ N-pole သံလိုက်စက်ကွင်းသည် အောက်ဘက်သို့ ထုတ်ပေးသည်၊ ၎င်းသည် လက်ရှိ Io ကွိုင်ကိုဖြတ်သွားသောအခါ ထုတ်ပေးသည့် သံလိုက်စက်ကွင်း၏ 0.5 ဆ အရွယ်အစားဖြစ်ပြီး၊ ၎င်းသည် အရွယ်အစား 1.5 ဆ ဖြစ်လာသည်။ ကွိုင်၏ သံလိုက်စက်ကွင်း 1 တွင် ထည့်သွင်းထားသည်။ ၎င်းသည် အမြဲတမ်းသံလိုက်နှင့်စပ်လျဉ်း၍ 90° ထောင့်တွင် ဓာတုသံလိုက်စက်ကွင်းကို ထုတ်ပေးသည်၊ သို့မှသာ အမြင့်ဆုံး torque ကို ထုတ်ပေးနိုင်ပြီး အမြဲတမ်းသံလိုက်သည် နာရီလက်တံအတိုင်း လည်ပတ်နေပါသည်။
ကွိုင် 2 ရှိ လျှပ်စီးကြောင်း လျော့သွားကာ ကွိုင် 3 တွင် လည်ပတ်နေသော အနေအထားအရ တိုးလာသောအခါ၊ ဓာတုသံလိုက်စက်ကွင်းသည် နာရီလက်တံအတိုင်း လည်ပတ်နေပြီး အမြဲတမ်း သံလိုက်သည် ဆက်လက် လည်ပတ်နေပါသည်။
②
30° လှည့်နေသည့်အခြေအနေတွင်၊ လက်ရှိ Io သည် coil 1 သို့ စီးဆင်းသွားသောကြောင့် coil 2 တွင် current သည် သုညဖြစ်ပြီး current Io သည် coil 3 မှ ထွက်သွားစေသည်။
ကွိုင် 1 ၏ အပြင်ဘက်ခြမ်းသည် S တိုင် ဖြစ်လာပြီး ကွိုင် 3 ၏ အပြင်ဘက်ခြမ်းသည် N တိုင် ဖြစ်လာသည်။ vector ကို ပေါင်းစပ်ပြီးသောအခါ၊ ကွိုင်တစ်ခုမှ ဖြတ်သွားသောအခါတွင် ထုတ်လုပ်သော သံလိုက်စက်ကွင်းသည် √3 (≈1.72) ဆဖြစ်သည်။ ၎င်းသည် အမြဲတမ်းသံလိုက်စက်ကွင်းအား 90° ထောင့်တွင် ပေါင်းစပ်ထားသော သံလိုက်စက်ကွင်းကို ထုတ်လုပ်ပေးပြီး နာရီလက်တံအတိုင်း လှည့်ပါသည်။
coil 1 ၏ inflow current Io ကို rotating position အရ လျှော့ချလိုက်သောအခါ coil 2 ၏ inflow current သည် သုညမှ တိုးလာပြီး coil 3 ၏ outflow current သည် Io သို့ တိုးလာသည်၊ ပေါင်းစပ်သံလိုက်စက်ကွင်းသည်လည်း နာရီလက်တံအတိုင်း လည်ပတ်နေပြီး အမြဲတမ်း၊ သံလိုက်သည် ဆက်လက်လည်ပတ်နေပါသည်။
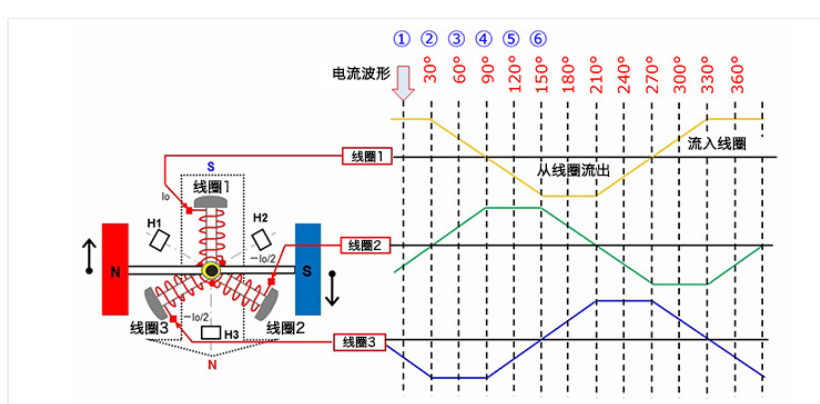
အဆင့်တစ်ခုစီရှိ လျှပ်စီးကြောင်းသည် sinusoidal ဟုယူဆလျှင်၊ ဤနေရာတွင် လက်ရှိတန်ဖိုးသည် Io × sin(π⁄3) = Io × √3⁄2 ဖြစ်သည်။ သံလိုက်စက်ကွင်း၏ vector ပေါင်းစပ်ခြင်းဖြင့်၊ စုစုပေါင်းသံလိုက်စက်ကွင်းအရွယ်အစားသည် (√3⁄2)2×2 = ကွိုင်တစ်ခုမှထုတ်ပေးသော သံလိုက်စက်ကွင်း 1.5 ဆဖြစ်သည်။ အဆင့်တစ်ခုစီရှိ ရေစီးကြောင်းများသည် sinusoidal ဖြစ်သောအခါ၊ vector ပေါင်းစပ်သံလိုက်စက်ကွင်း၏ပြင်းအားသည် အမြဲတမ်းသံလိုက်၏ အနေအထား မည်သို့ပင်ရှိစေကာမူ ကွိုင်တစ်ခုမှထုတ်လုပ်သော သံလိုက်စက်ကွင်း 1.5 ဆဖြစ်ပြီး သံလိုက်စက်ကွင်းသည် 90° ထောင့်တွင် ရှိနေသည်။ အမြဲတမ်းသံလိုက်စက်ကွင်း။
③
30° လည်ပတ်နေသည့် အခြေအနေတွင် လက်ရှိ Io/2 သည် coil 1 သို့ စီးဆင်းပြီး၊ လက်ရှိ Io/2 သည် coil 2 သို့ စီးဆင်းသွားပြီး လက်ရှိ Io သည် coil 3 မှ ထွက်သွားပါသည်။
ကွိုင် 1 ၏ အပြင်ဘက်ခြမ်းသည် S တိုင် ဖြစ်လာသည်၊ ကွိုင် 2 ၏ အပြင်ဘက်ခြမ်းသည်လည်း S တိုင် ဖြစ်လာပြီး ကွိုင် 3 ၏ အပြင်ဘက်သည် N တိုင် ဖြစ်လာသည်။ vector ကို ပေါင်းစပ်ပြီးသောအခါ၊ လက်ရှိ Io သည် ကွိုင်တစ်ခုမှတဆင့် စီးဆင်းသောအခါတွင် ထုတ်ပေးသော သံလိုက်စက်ကွင်းသည် 1.5 ဆဖြစ်သည်။ ဤနေရာတွင်လည်း၊ အမြဲတမ်းသံလိုက်စက်ကွင်းအား 90° ထောင့်မှ ထုတ်ပေးပြီး နာရီလက်တံအတိုင်း လည်ပတ်သည်။
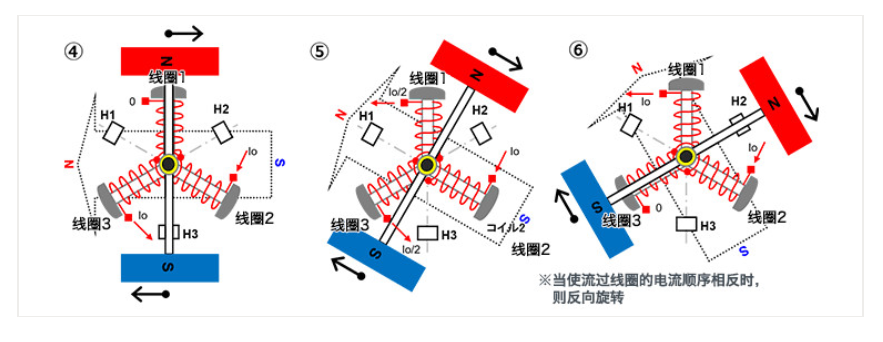
④~⑥
① မှ ③ ကဲ့သို့ လှည့်ပါ။
ဤနည်းအားဖြင့် ကွိုင်ထဲသို့ စီးဆင်းနေသော လျှပ်စီးကြောင်းသည် အမြဲတမ်းသံလိုက်၏ အနေအထားအတိုင်း ဆက်တိုက် ရွေ့လျားနေပါက အမြဲတမ်း သံလိုက်သည် ပုံသေ ဦးတည်ရာသို့ လှည့်နေမည်ဖြစ်သည်။ အလားတူပင်၊ လျှပ်စီးကြောင်းသည် ပြောင်းပြန်ဖြစ်ပြီး ပေါင်းစပ်သံလိုက်စက်ကွင်း၏ ဦးတည်ရာကို ပြောင်းပြန်လျှင်၊ ၎င်းသည် နာရီလက်တံအတိုင်း လှည့်သွားမည်ဖြစ်သည်။
အောက်ပါပုံသည် ① မှ ⑥ အဆင့်တစ်ခုစီအတွက် ကွိုင်တစ်ခုစီရှိ ရေစီးကြောင်းများကို ဆက်တိုက်ပြသသည်။ လက်ရှိပြောင်းလဲမှုနှင့် လည်ပတ်မှုကြား ဆက်စပ်မှုကို အထက်ဖော်ပြချက်ဖြင့် နားလည်ထားသင့်သည်။
Stepper မော်တာများ
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
stepper motor ၏ဖွဲ့စည်းပုံ (အဆင့်နှစ်ဆင့် bipolar)
အောက်ဖော်ပြပါပုံများသည် ဘယ်မှညာမှ stepper motor ၏အသွင်အပြင်၊ အတွင်းပိုင်းဖွဲ့စည်းပုံ၏ပုံကြမ်းနှင့် ဖွဲ့စည်းပုံအယူအဆ၏ပုံကြမ်းကို ဥပမာပြထားသည်။
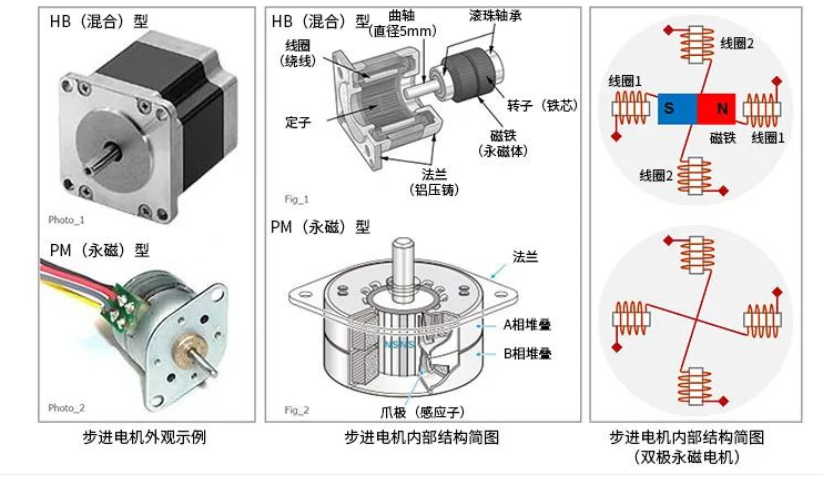
အသွင်အပြင်ဥပမာတွင်၊ HB (hybrid) အမျိုးအစားနှင့် PM (အမြဲတမ်းသံလိုက်) အမျိုးအစား stepper မော်တာများ၏အသွင်အပြင်ကိုပေးထားသည်။ အလယ်ရှိ တည်ဆောက်ပုံ ဇယားကို HB အမျိုးအစားနှင့် PM အမျိုးအစားအတွက် ပေးထားသည်။
stepper motor သည် coil ကို fixed ဖြစ်ပြီး အမြဲတမ်း magnet သည် လည်ပတ်နေသည့် ဖွဲ့စည်းပုံဖြစ်သည်။ ညာဘက်ရှိ stepper motor ၏အတွင်းပိုင်းတည်ဆောက်ပုံ၏ conceptual diagram သည် two-phase (2 sets) coils ကိုအသုံးပြုထားသော PM motor ၏ဥပမာတစ်ခုဖြစ်သည်။ အခြေခံ stepper မော်တာတည်ဆောက်ပုံဥပမာတွင်၊ ကွိုင်များကို အပြင်ဘက်တွင် configure လုပ်ထားပြီး အတွင်းတွင် အမြဲတမ်းသံလိုက်များကို configure လုပ်ထားသည်။ two-phase coil အပြင်၊ three-phase နှင့် five-phase ကဲ့သို့သော အဆင့်ပိုများသော အမျိုးအစားများလည်း ရှိသေးသည်။
အချို့သော stepper မော်တာများသည် အခြားဖွဲ့စည်းပုံအမျိုးမျိုးရှိသော်လည်း ၎င်း၏လည်ပတ်မှုနိယာမကို နိဒါန်းတွင်လွယ်ကူချောမွေ့စေရန်အတွက် stepper motor ၏အခြေခံဖွဲ့စည်းပုံကို ဤစာတမ်းတွင် ဖော်ပြထားသည်။ ဤစာတမ်းမှတဆင့်၊ ပုံသေကွိုင်များနှင့် အမြဲတမ်းသံလိုက်ဖြင့် လှည့်နေသော stepper motor များ၏ အခြေခံတည်ဆောက်ပုံကို နားလည်ရန် မျှော်လင့်ပါသည်။
stepper motor ၏ အခြေခံလုပ်ဆောင်မှုနိယာမ (single-phase excitation)
အောက်ဖော်ပြပါ ပုံကြမ်းအား stepper motor ၏ အခြေခံလည်ပတ်မှုနိယာမကို မိတ်ဆက်ရန်အတွက် အသုံးပြုပါသည်။ ဤသည်မှာ အထက်တွင်ရှိသော two-phase bipolar type coils ၏ အဆင့်တစ်ခုစီ (ကွိုင်အစု) အတွက် စိတ်လှုပ်ရှားခြင်း ဥပမာတစ်ခုဖြစ်သည်။ ပုံကြမ်း၏ အနှစ်ချုပ်မှာ ပြည်နယ်သည် ① မှ ④ သို့ ပြောင်းလဲသွားခြင်း ဖြစ်သည်။ ကွိုင်များတွင် ကွိုင် 1 နှင့် ကွိုင် 2 အသီးသီး ပါဝင်သည်။ ထို့အပြင်၊ လက်ရှိမြှားများသည် လက်ရှိစီးဆင်းမှု၏ ဦးတည်ချက်ကို ညွှန်ပြသည်။
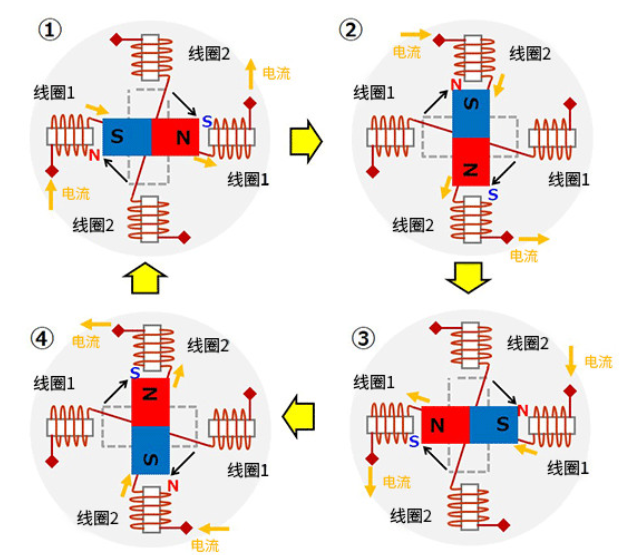
①
・ ကွိုင် 1 ၏ ဘယ်ဘက်ခြမ်းမှ လက်ရှိစီးဆင်းမှုကို ကွိုင် 1 ၏ ညာဖက်ခြမ်းမှ ထွက်အောင်လုပ်ပါ။
· coil 2 မှတဆင့် current စီးဆင်းမှုကို ခွင့်မပြုပါနှင့်။
・ယခုအချိန်တွင် ဘယ်ဘက်ကွိုင် 1 ၏အတွင်းဘက်ခြမ်းသည် N ဖြစ်လာပြီး ညာဘက်ကွိုင် 1 ၏အတွင်းဘက်သည် S ဖြစ်လာသည်။
・ရလဒ်အနေဖြင့် အလယ်အမြဲတမ်းသံလိုက်အား ကွိုင် 1 ၏ သံလိုက်စက်ကွင်းမှ ဆွဲဆောင်ပြီး ဘယ်ဘက် S နှင့် ညာဘက်ခြမ်း N သို့ ပြောင်းလဲကာ ရပ်သွားပါသည်။
②
・ ကွိုင် 1 ၏ လျှပ်စီးကြောင်းအား ရပ်သွားစေရန်အတွက် ကွိုင် 2 ၏ အပေါ်ဘက်ခြမ်းမှ လျှပ်စီးကြောင်းနှင့် ကွိုင် 2 ၏ အောက်ဘက်ခြမ်းတို့မှ စီးဆင်းသွားစေသည်။
・ အပေါ်ကွိုင် 2 ၏အတွင်းဘက်ခြမ်းသည် N သို့ပြောင်းသွားပြီး အောက်ကွိုင် 2 ၏အတွင်းဘက်ခြမ်းသည် S သို့ပြောင်းလဲသွားသည်။
・အမြဲတမ်းသံလိုက်အား ၎င်း၏သံလိုက်စက်ကွင်းမှ ဆွဲဆောင်ပြီး ရပ်ရန် 90° နာရီလက်တံအတိုင်း လှည့်ပတ်သည်။
③
・ ကွိုင် 2 ၏ လျှပ်စီးကြောင်းအား ရပ်သွားစေရန်အတွက် ကွိုင် 1 ၏ ညာဖက်ခြမ်းမှ လျှပ်စီးကြောင်းနှင့် ကွိုင် 1 ၏ ဘယ်ဘက်ခြမ်းမှ ထွက်သွားသည်။
・ဘယ်ဘက်ကွိုင် 1 ၏အတွင်းဘက်ခြမ်းသည် S ဖြစ်လာပြီး ညာဘက်ကွိုင် 1 ၏အတွင်းဘက်သည် N ဖြစ်လာသည်။
・အမြဲတမ်းသံလိုက်အား ၎င်း၏သံလိုက်စက်ကွင်းမှ ဆွဲဆောင်ပြီး ရပ်ရန် နောက်ထပ် 90° ဖြင့် နာရီလက်တံအတိုင်း လှည့်သည်။
④
・ ကွိုင် 1 တွင် လျှပ်စီးကြောင်းကို ရပ်ထားခြင်းဖြင့် ကွိုင် 2 ၏ အောက်ဘက်ခြမ်းမှ စီးဆင်းသွားပြီး ကွိုင် 2 ၏ အပေါ်ဘက်ခြမ်းမှ စီးဆင်းသွားစေရန်။
・ အပေါ်ကွိုင် 2 ၏အတွင်းဘက်ခြမ်းသည် S ဖြစ်လာပြီး အောက်ကွိုင် 2 ၏အတွင်းဘက်ခြမ်းသည် N ဖြစ်လာသည်။
・အမြဲတမ်းသံလိုက်အား ၎င်း၏သံလိုက်စက်ကွင်းမှ ဆွဲဆောင်ပြီး ရပ်ရန် နောက်ထပ် 90° ဖြင့် နာရီလက်တံအတိုင်း လှည့်သည်။
① မှ ④ အထက်အစီအစဥ်အတိုင်း ကွိုင်မှတဆင့်စီးဆင်းနေသော လျှပ်စစ်ပတ်လမ်းဖြင့် stepper motor ကို လှည့်နိုင်သည်။ ဤဥပမာတွင်၊ switching action တစ်ခုစီသည် stepper motor ကို 90° လှည့်စေသည်။
ထို့အပြင်၊ ကွိုင်တစ်ခုမှတစ်ဆင့် လျှပ်စီးကြောင်းသည် အဆက်မပြတ်စီးဆင်းနေသောအခါ၊ ရပ်တန့်နေသောအခြေအနေကို ထိန်းသိမ်းထားနိုင်ပြီး stepper motor သည် လက်ကိုင် torque ရှိနိုင်သည်။ မတော်တဆအားဖြင့်၊ coil မှတဆင့်စီးဆင်းနေသောလက်ရှိအစီအစဥ်ကိုပြောင်းပြန်လျှင်၊ stepper motor ကိုပြောင်းပြန်လှည့်ရန်ပြုလုပ်နိုင်သည်။
ပရော်ဖက်ရှင်နယ်စက်မှုလုပ်ငန်းမော်တာထုတ်လုပ်သူ - Dongchun Motor China ကိုရှာပါ

ဆက်စပ်ပို့စ်များ-






