 အကြောင်းအရာသို့ ကျော်သွားပါ။
အကြောင်းအရာသို့ ကျော်သွားပါ။ Brushless Motor နှင့် Brushed Motor အကြား ကွာခြားချက်ကား အဘယ်နည်း။
synchronous motor နှင့် asynchronous motor အကြား ကွာခြားချက်ကား အဘယ်နည်း။
အနာရဟတ် induction motor ကော ဘယ်လိုလဲ။
ဆာဗာမော်တာအားလုံး AC မော်တာများလား။
ဆာဗာမော်တာအားလုံးသည် synchronous မော်တာများလား။
Stepper မော်တာများသည် DC မော်တာများ သို့မဟုတ် AC မော်တာများနှင့် သက်ဆိုင်ပါသလား။
ဆာဗာမော်တာသည် ဆာဗာမော်တာဖြစ်ပါသလား။ .....။
တစ်ချိန်က ပညာရှိများက ဤသို့ဆိုသည်– အသိပညာသည် စနစ်မကျပါက စာပိုဒ်နှင့် စာပိုဒ်ကြား ကွာခြားချက်မှာ အဘယ်နည်း။
သို့သော် ရှည်လျားသော စာသားပါသော ပညာရှိစာအုပ်၊ စိတ်ကူးယဉ်ဆန်သော အသုံးအနှုန်းများ၊ ခိုင်လုံသောရှင်းပြချက်သည် တိမ်တိုက်များရှိလူများကို အမှန်တကယ်ကြည့်သည်။
ကျွန်တော်အင်တာနက်ကို အချိန်အတော်ကြာအောင် ရှာဖွေခဲ့ပြီး လျှပ်စစ်မော်တာများ၏ တည်ဆောက်ပုံနှင့် အမျိုးအစားခွဲခြားမှုဆိုင်ရာ နိယာမကို ပိုမိုစနစ်တကျ ရှင်းပြသည်ကို မတွေ့သဖြင့် မိတ္တူကို မေးမြန်းပြီး စုစည်းရန် အားထုတ်ကြိုးပမ်းခဲ့ကြပါသည်။
ဤဆောင်းပါးသည် ရိုးရှင်းသော ဘာသာစကားဖြင့် စနစ်တကျ အသိပညာကို ရှင်းပြရန် ကြိုးစားပြီး မထင်မရှား အသိပညာကို ကွက်ကွက်ကွင်းကွင်း ဖော်ပြရန် ကာတွန်းနှင့် ရုပ်ပုံများကို အသုံးပြုထားသည်။
ကျွန်ုပ်၏ အသိပညာအကန့်အသတ်ကြောင့် အမှားများစွာရှိနေရန် ရှောင်လွှဲ၍မရပါ၊ ကျေးဇူးပြု၍ ကျွမ်းကျင်သူများကို ပြင်ပေးပါ၊ အကြံဉာဏ်ပေးရန် မတွန့်ဆုတ်ပါနှင့်။
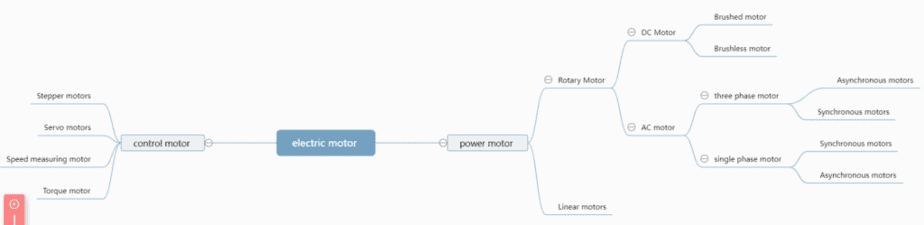
1. လျှပ်စစ်မော်တာများ၏အခြေခံအမျိုးအစားများကိုရှင်းပြရန်ပုံတစ်ခု
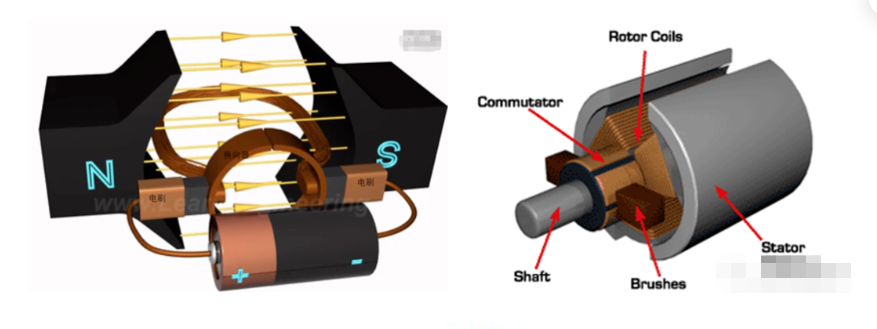
2. DC လျှပ်စစ်မော်တာ - စုတ်တံမော်တာ
အလယ်တန်းကျောင်းသူလေးများ၏ ရူပဗေဒကိုဖတ်ကြည့်တော့ DC induction motor ၏ နိယာမ အတိအကျဖြစ်သည့် DC induction motor ၏ နိယာမဖြစ်သော စွမ်းအင်ရှိသော စပယ်ယာအား လေ့လာရန်အတွက် အလယ်တန်းကျောင်းမှ ရူပဗေဒကိုဖတ်ပါ။
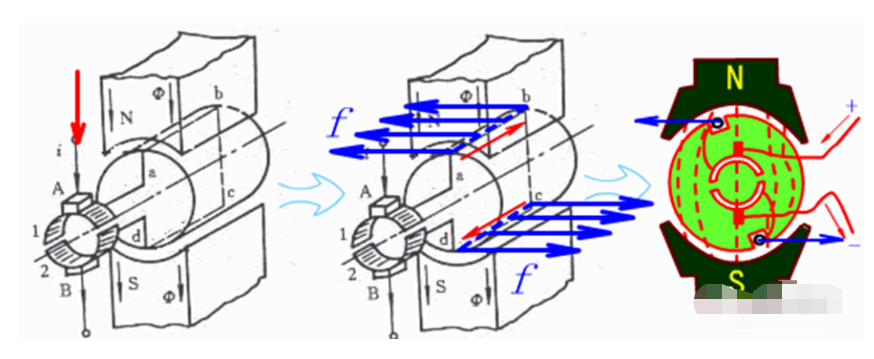
လျှပ်စစ်မော်တာအားလုံးသည် stator နှင့် rotor များဖြင့်ဖွဲ့စည်းထားပြီး၊ DC လျှပ်စစ်မော်တာများတွင် ရဟတ်ကိုလှည့်ရန်အတွက်၊ သင်သည် လက်ရှိဦးတည်ချက်အား အဆက်မပြတ်ပြောင်းလဲရန် လိုအပ်သည်၊ သို့မဟုတ်ပါက ရဟတ်သည် တစ်ဝက်တစ်လှည့်သာလှည့်နိုင်သည်၊ ၎င်းသည် စက်ဘီးနင်းသလိုမျိုး၊ .
ထို့ကြောင့် DC မော်တာများသည် ကွန်မြူတာများ လိုအပ်ပါသည်။
ကျယ်ကျယ်ပြန့်ပြန့်ပြောရလျှင် Brushed DC မော်တာများတွင် brushed motors နှင့် brushless motor များပါဝင်သည်။
Brush motor ကို DC induction motor သို့မဟုတ် carbon brush motor လို့လည်း ခေါ်ပြီး brush DC motor လို့လည်း ခေါ်ပါတယ်။
၎င်းသည် စက်ပိုင်းဆိုင်ရာပြောင်းလဲမှုကိုအသုံးပြုသည်၊ ပြင်ပဝင်ရိုးသည် အတွင်းကွိုင် (armature) ရွေ့လျားခြင်းမရှိပါ၊ ကွန်မြူတာတာနှင့် ရဟတ်ကွိုင်တို့သည် အတူတကွလည်ပတ်နေသည်၊ စုတ်တံများနှင့်သံလိုက်များသည် ရွေ့လျားခြင်းမရှိပါ၊ ထို့ကြောင့် ကွန်မြူတာတာနှင့် ပွတ်တိုက်မှုပွတ်တိုက်မှုသည် လက်ရှိဦးတည်ချက်ပြောင်းခြင်းကို အပြီးသတ်ပါ။
Brush motor ၏ အားနည်းချက်များ။
1၊ commutator နှင့် brush ပွတ်တိုက်မှု၊ လျှပ်စစ်သံလိုက်ဝင်ရောက်စွက်ဖက်မှု၊ မြင့်မားသောဆူညံမှု၊ သက်တမ်းတိုတောင်းသောစက်မှထုတ်ပေးသောမီးပွားများ၏စက်ပိုင်းဆိုင်ရာပြောင်းလဲမှု။
2၊ ယုံကြည်စိတ်ချရမှု ညံ့ဖျင်းခြင်း၊ မကြာခဏ ပြုပြင်ထိန်းသိမ်းမှု လိုအပ်ခြင်း။
3၊ ကွန်မြူတာတာရှိနေခြင်းကြောင့်၊ ရဟတ်အင်တာပိုကိုကန့်သတ်ခြင်း၊ အမြင့်ဆုံးအမြန်နှုန်းကိုကန့်သတ်ခြင်း၊ တက်ကြွသောစွမ်းဆောင်ရည်ကိုထိခိုက်စေခြင်း။
၎င်းတွင် ချို့ယွင်းချက်များစွာရှိသောကြောင့် ၎င်းသည် torque မြင့်မားသောကြောင့်၊ ရိုးရှင်းသောဖွဲ့စည်းပုံသည် ပြုပြင်ထိန်းသိမ်းရလွယ်ကူသောကြောင့် (ဆိုလိုသည်မှာ ကာဗွန်စုတ်တံများကို ပြောင်းလဲခြင်း) စျေးပေါသောကြောင့်ဖြစ်သည်။
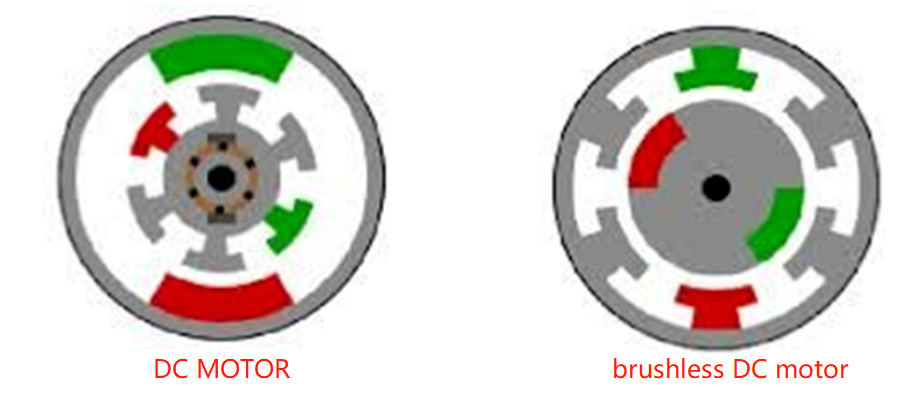
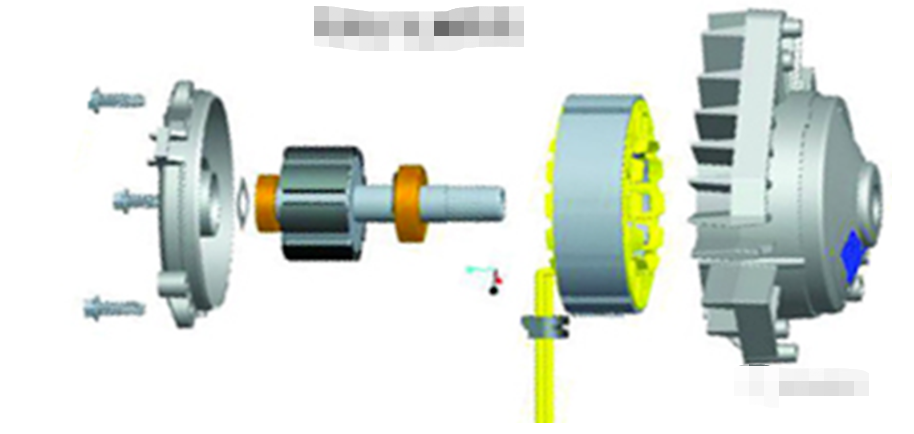
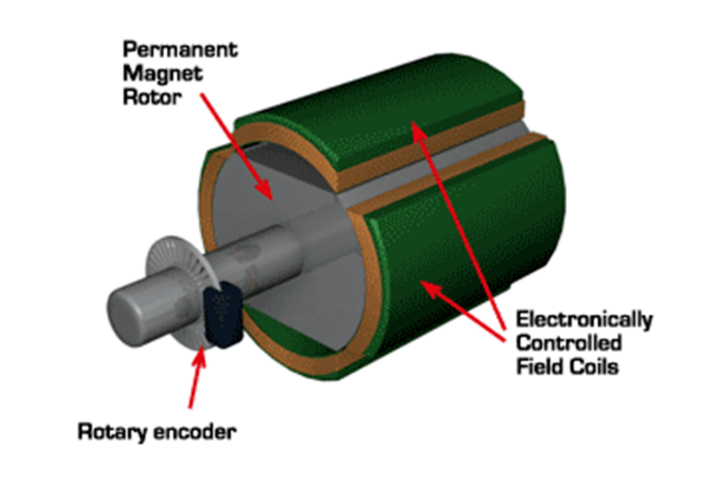
2. DC မော်တာ - brushless မော်တာများ
Brushless motor ကို အချို့နယ်ပယ်များတွင် DC inverter motor (BLDC) ဟုခေါ်သည်၊ ၎င်းသည် electronic commutation (Hall sensor) ကိုအသုံးပြု၍ coil (armature) သည် သံလိုက်ဝင်ရိုးများကိုမရွေ့ဘဲ၊ ထို့နောက် အမြဲတမ်းသံလိုက်သည် coil အပြင်ဘက် သို့မဟုတ် coil အတွင်းတွင်ရှိနိုင်သည်။ ထို့ကြောင့် ပြင်ပရဟတ် brushless motor နှင့် internal rotor brushless motor ရှိပါသည်။
Brushless မော်တာများကို အမြဲတမ်း သံလိုက်ထပ်တူ မော်တာများကဲ့သို့ပင် တည်ဆောက်ထားသည်။
သို့သော် တစ်ခုတည်းသော brushless motor သည် ပြီးပြည့်စုံသော ပါဝါစနစ်မဟုတ်ပါ။ စဉ်ဆက်မပြတ်လည်ပတ်မှုအောင်မြင်ရန် Brushless ကို အခြေခံအားဖြင့် ESC ဟုလည်းခေါ်သော brushless controller မှ ထိန်းချုပ်ရပါမည်။
၎င်းသည် ၎င်း၏ စွမ်းဆောင်ရည်ကို အမှန်တကယ် ဆုံးဖြတ်ပေးသည့် brushless အီလက်ထရွန်းနစ် အုပ်ချုပ်ရေးမှူး (ESC) ဖြစ်သည်။
ယေဘူယျအားဖြင့်၊ brushless motor များအတွက် drive လျှပ်စီးကြောင်း နှစ်မျိုးရှိပြီး၊ တစ်ခုသည် square wave ဖြစ်ပြီး နောက်တစ်ခုသည် sine wave ဖြစ်သည်။
တခါတရံတွင် ယခင် DC brushless motor ဟုခေါ်ပြီး ၎င်းကို AC servo motor အမျိုးအစားအတိအကျဖြစ်သည့် AC servo motor ဟုခေါ်သည်။
Brushless မော်တာများသည် မတူညီသောနည်းလမ်းများဖြင့် လည်ပတ်ကြပြီး အတွင်းရဟတ်မရှိသော မော်တာများနှင့် အပြင်ဘက်ရဟတ်မှ brushless မော်တာများအဖြစ် ခွဲခြားနိုင်သည်။
အတွင်းရဟတ်သည် သုံးဆင့်ဖြစ်ပြီး ပို၍စျေးကြီးသည်။
အပြင်ဘက်ရဟတ်ကို အများအားဖြင့် single-phase တွင်အသုံးပြုကြပြီး၊ လူအများ၏စျေးနှုန်း၊ အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုသည် ကာဗွန်စုတ်တံမော်တာနှင့်နီးစပ်သောကြောင့် မကြာသေးမီနှစ်များအတွင်းတွင်တွင်ကျယ်ကျယ်အသုံးပြုလာကြသည်။
ပြင်ပရဟတ်သုံးဆင့်၏စျေးနှုန်းသည် အတွင်းရဟတ်၏စျေးနှုန်းနှင့် နီးစပ်ပါသည်။
ကောင်းပြီ၊ သင်ခန့်မှန်းနိုင်သကဲ့သို့၊ brush motors ၏အားနည်းချက်သည် brushless motors ၏အချက်ဖြစ်သည်။
၎င်းတွင် စွမ်းဆောင်ရည်မြင့်မားခြင်း၊ စွမ်းအင်သုံးစွဲမှုနည်းခြင်း၊ ဆူညံသံနည်းပါးခြင်း၊ တာရှည်ခံခြင်း၊ မြင့်မားသောယုံကြည်စိတ်ချရမှု၊ servo ထိန်းချုပ်မှု၊ stepless ကြိမ်နှုန်းပြောင်းလဲခြင်းအမြန်နှုန်း (အလွန်မြင့်မားသောအမြန်နှုန်းအထိ) နှင့် အခြားအားသာချက်များရှိသည်။
၎င်းသည် brush DC မော်တာထက်အတော်လေးသေးငယ်သည်၊ asynchronous AC motor ထက်ထိန်းချုပ်မှုသည်ရိုးရှင်းသည်၊ စတင်သည့် torque သည်ကြီးမားသော overload စွမ်းရည်ဖြစ်သည်၊ အားနည်းချက်များအတွက် ...... သည် brush ထက်စျေးကြီးသည်၊ မကောင်းတဲ့ထိန်းသိမ်းမှု။
2. DC မော်တာ - အမြန်နှုန်းထိန်းချုပ်မှုနိယာမ
DC induction motor speed regulation- လိုအပ်သော torque ကိုရရှိရန် မော်တာအမြန်နှုန်းကို ချိန်ညှိခြင်းဖြင့် ဆိုလိုသည်မှာ အမြန်နှုန်းထိန်းညှိခြင်း ဖြစ်သည်။
အမြဲတမ်းသံလိုက် dc မော်တာသည် ဗို့အားကိုချိန်ညှိခြင်းဖြင့်၊ စီးရီးခံနိုင်ရည်ရှိမှု၊ စိတ်လှုပ်ရှားမှုကိုပြောင်းလဲခြင်းဖြင့် အမြန်နှုန်းဖြစ်စေနိုင်သည်၊ သို့သော် အမှန်တကယ်ဗို့အားချိန်ညှိမှုသည် အဆင်ပြေဆုံးနှင့် အသုံးအများဆုံးဖြစ်ပြီး PWM မြန်နှုန်းစည်းမျဉ်း၏ အဓိကအသုံးပြုမှုဖြစ်သည်။
PWM သည် DC ဗို့အားထိန်းညှိမှုရရှိရန် မြန်နှုန်းမြင့်ခလုတ်မှတဆင့်၊ လည်ပတ်မှုတစ်ခု၊ အချိန်ကြာမြင့်စွာဖွင့်ခြင်း၊ ပျမ်းမျှဗို့အားမြင့်ခြင်း၊ အချိန်ကြာမြင့်စွာပိတ်ခြင်း၊ ပျမ်းမျှဗို့အားနိမ့်ခြင်း၊ ခလုတ်ကိုချိန်ညှိရန် အလွန်အဆင်ပြေပါသည်။ အရှိန်အဟုန်သည် အလုံအလောက် မြန်နေသရွေ့၊ ဂရစ်ဒ်၏ ဟာမိုနီများသည် လျော့နည်းသွားပြီး လက်ရှိသည် ပို၍ ဆက်တိုက်ဖြစ်သည်။
သို့သော်၊ စုတ်တံများနှင့် ကွန်မြူတာတာများသည် အချိန်ကြာမြင့်စွာ ဝတ်ဆင်ကြပြီး တစ်ချိန်တည်းတွင် မီးပွားများထွက်လာရန် အလွန်လွယ်ကူသော ကူးပြောင်းမှုအတွင်း ကြီးမားသော လက်ရှိပြောင်းလဲမှုတစ်ခု ရှိနေပါသည်။
commutator နှင့် brushes များသည် DC induction motor ၏ စွမ်းရည်နှင့် အမြန်နှုန်းကို ကန့်သတ်ထားပြီး၊ ၎င်းသည် DC induction motor ၏ speed regulation သည် တစ်ဆို့နေသည့်အရာနှင့် ပြည့်မီစေသည်။
brushless DC induction motor အတွက်၊ speed control သည် မျက်နှာပြင်ပေါ်ရှိ input voltage ကိုသာ ထိန်းချုပ်ပါသည်။
သို့သော် မော်တာ၏ ကိုယ်တိုင်ထိန်းချုပ်မှု ကြိမ်နှုန်းထိန်းချုပ်မှုစနစ် (brushless DC မော်တာကိုယ်တိုင်က ရဟတ်အနေအထား detector နှင့် အခြားရဟတ်အနေအထား အချက်ပြရယူမှုကိရိယာတို့ပါရှိပြီး၊ ဤစက်ပစ္စည်း၏ ရဟတ်အနေအထား အချက်ပြအချက်ပြမှုကို အသုံးပြု၍ ပြောင်းလဲနိုင်သော ဗို့အားကြိမ်နှုန်း ထိန်းချုပ်ကိရိယာ အဆင့်ပြောင်းလဲမှု အခိုက်အတန့်ကို ထိန်းချုပ်ရန်) အလိုအလျောက် ထိန်းချုပ်ပေးပါသည်။ DC (brushed) motor နှင့်နီးပါးတူညီသော variable voltage အရ ကြိမ်နှုန်းသည် အလွန်အဆင်ပြေသည်။ အရမ်းအဆင်ပြေတယ်။
ရဟတ်သည် အမြဲတမ်းသံလိုက်များကိုအသုံးပြုထားသောကြောင့် အထူးလှုံ့ဆော်မှုအကွေ့အကောက်များမရှိပါ၊ တူညီသောစွမ်းရည်ရှိလျှင် မော်တာသည် သေးငယ်သည်၊ ပေါ့ပါးသည်၊ ပိုထိရောက်သည်၊ ပိုကျစ်လစ်သည်၊ ပိုယုံကြည်စိတ်ချရသောလည်ပတ်မှု၊ ပိုမိုကောင်းမွန်သောသွက်လက်သောစွမ်းဆောင်ရည်၊ လျှပ်စစ်ကားများနှင့်အခြားကဏ္ဍများကိုမောင်းနှင်နိုင်သည်။ တွင်ကျယ်စွာအသုံးပြုခဲ့ကြပါသည်။
3. အဆင့်သုံး AC မော်တာများ - အပြိုင်အဆိုင် မော်တာများ
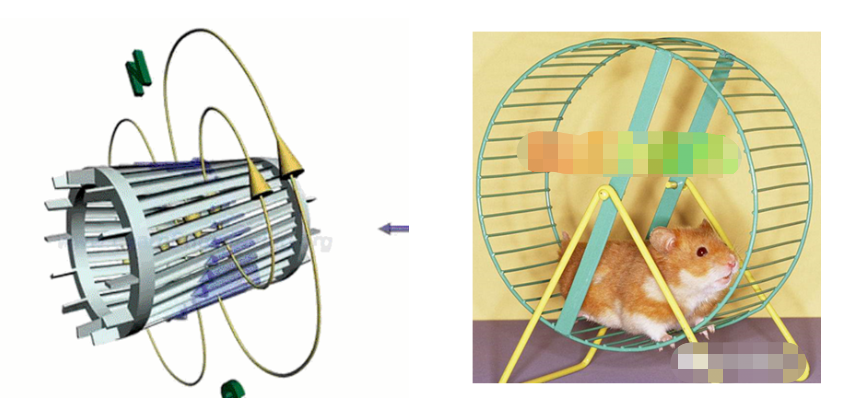
AC မော်တာများကို synchronous motors နှင့် asynchronous motors များအဖြစ် ပိုင်းခြားထားပြီး synchronous motor များကို generator များတွင် အများဆုံးအသုံးပြုကြပြီး asynchronous motors များကို လျှပ်စစ်မော်တာများတွင် အများဆုံးအသုံးပြုပါသည်။ ၎င်းတို့သည် ရှဉ့်လှောင်အိမ်၏ induction motor ဖြစ်သည်။
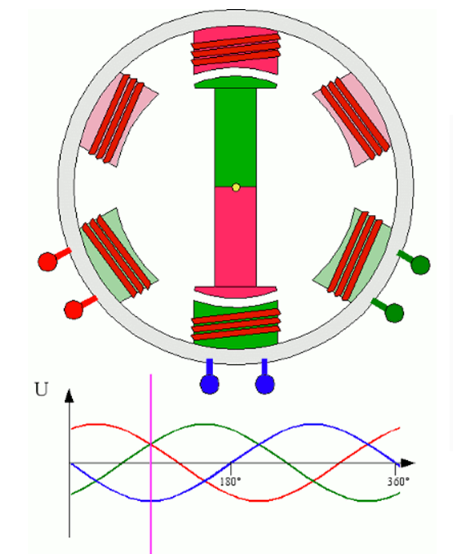
မော်တာ၏အိမ်သည် stator ဖြစ်ပြီး stator ပေါ်တွင် symmetrical AC windings သုံးခုရှိသည်။
အဆင့်သုံးဆင့်၏ အစီအစဥ် ပြောင်းလဲလာသည်နှင့်အမျှ၊ လည်ပတ်နေသော ပေါင်းစပ်သံလိုက်စက်ကွင်းတစ်ခု ဖြစ်ပေါ်လာပြီး သံလိုက်စက်ကွင်း၏ လည်ပတ်မှုအမြန်နှုန်းသည် ပြိုင်တူကူးနိုင်သော အမြန်နှုန်းဖြစ်သည်။
synchronous speed n=60f/p၊ f သည် ကြိမ်နှုန်း၊ p သည် တိုင်အတွဲများ၏ အရေအတွက်ဖြစ်သည်၊ ဥပမာ၊ နိုင်ငံလုံးဆိုင်ရာ grid 50Hz သို့ ချိတ်ဆက်ထားသော 2-pole မော်တာအတွက် (ဆိုလိုသည်မှာ တိုင်အတွဲအရေအတွက်သည် 1 pair)၊ ထို့နောက်၊ အမြန်နှုန်း n=60*50/1=3000r/min။
အလားတူ၊ 4-pole၊ 6-pole နှင့် 8-pole မော်တာများ၏ synchronous speed သည် 1500၊ 1000 နှင့် 750 ဖြစ်သည်။
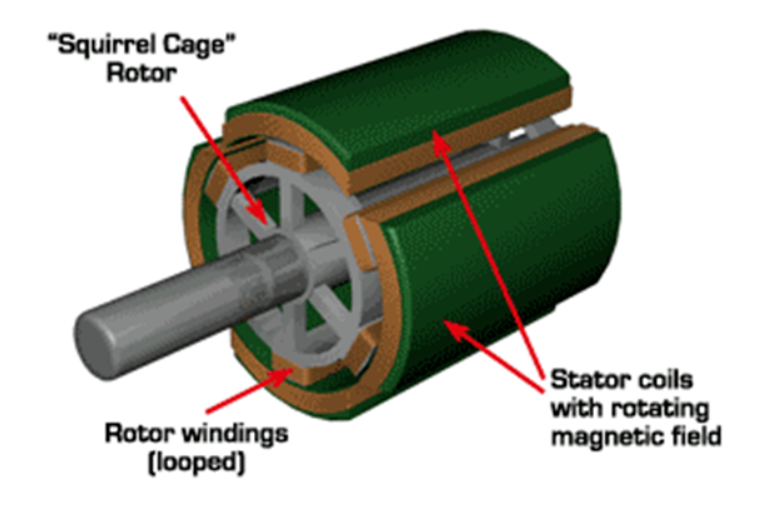
Asynchronous မော်တာများတွင် ရှဉ့်လှောင်အိမ် အမျိုးအစားကဲ့သို့ အပိတ်ကွိုင်ရဟတ်ပါသော ရိုးရှင်းသော ယန္တရားတစ်ခု ရှိသည်။
ရဟတ်ကွိုင်သည် လှည့်ပတ်သော သံလိုက်စက်ကွင်းကို ဖြတ်တောက်မည်ဖြစ်ပြီး၊ ၎င်းသည် တွန်းအားဖြစ်စေသော လျှပ်စီးကြောင်းနှင့် နောက်ဆုံးတွင် လှည့်ပတ်နေသော သံလိုက်စက်ကွင်းကို ထုတ်ပေးသည်။
သို့မှသာ ရဟတ်သည် လျှပ်စစ်သံလိုက်ဖြစ်လာပြီး stator သံလိုက်စက်ကွင်း၏ လည်ပတ်မှုကို လိုက်နာနိုင်စေရန်၊ ထို့ကြောင့် ရဟတ်၏ အမြန်နှုန်းသည် ဖြစ်ရမည်၊ < သံလိုက် induction လိုင်းများကိုဖြတ်ရန် stator ၏လည်ပတ်သံလိုက်စက်ကွင်း။
The public number "Mechanical Engineering Digest", a refueling station for engineers!
ဆိုလိုသည်မှာ rotor ၏ asynchronous speed ဖြစ်သည်။ <synchronous speed၊ rotor နှင့် stator magnetic field အကြား အမြန်နှုန်း ကွာခြားချက် ရှိသည်၊ ထို့ကြောင့် ၎င်းကို asynchronous motor ဟုခေါ်သည်။
Asynchronous motor ၏ အဆင့်သတ်မှတ်အမြန်နှုန်းသည် ထုတ်လုပ်သူနှင့် ထုတ်လုပ်သူထံမှ အနည်းငယ်ကွဲပြားသည်၊ 2-pole မော်တာအတွက် 2800+r/min၊ 4-pole အတွက် 1400+,950+,700+၊ 6-pole နှင့် 8-pole asynchronous ဖြစ်သည်။
ဝန်မရှိသည့်အခါ အပြိုင်အဆိုင် မော်တာ၏ အမြန်နှုန်းသည် မြင့်မားပြီး ဝန်ရှိလာသောအခါ လျော့နည်းသွားသည်။
Asynchronous မော်တာတွင် ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ ပြုပြင်ထိန်းသိမ်းရလွယ်ကူမှု၊ ယုံကြည်စိတ်ချရသော လည်ပတ်မှုနှင့် စျေးနှုန်းချိုသာစွာဖြင့် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုထားသည်။
4. သုံးဆင့် AC မော်တာ - synchronous မော်တာများ
Synchronous မော်တာ
ရဟတ်အမြန်နှုန်း = stator သံလိုက်စက်ကွင်းလည်ပတ်မှုအမြန်နှုန်းကို ခွင့်ပြုပါက၊ ၎င်းသည် synchronous motor ဖြစ်လာသည်၊ ဤအချိန်တွင် stator အား လျှပ်စစ်သံလိုက် သို့မဟုတ် အမြဲတမ်းသံလိုက်အဖြစ်သို့ ပြောင်းလဲရန် လိုအပ်သည်၊ ဆိုလိုသည်မှာ stator အား အားကောင်းစေရန်၊ ဤအချိန်တွင် မလိုအပ်တော့ပါ။ သံလိုက် induction line ကိုဖြတ်တောက်ရန် rotation speed နှင့် magnetic field rotation speed သည် synchronous motor ၏ဖွဲ့စည်းခြင်းဖြစ်သည်၊ ဆိုလိုသည်မှာ တူညီပါသည်။
Synchronous motor rotor တည်ဆောက်ပုံသည် asynchronous motors များထက် ပိုမိုရှုပ်ထွေးသည်၊ စျေးနှုန်းကြီးမြင့်သည်၊ ထုတ်လုပ်မှုသက်တမ်းတွင် asynchronous motors ကဲ့သို့ တွင်ကျယ်စွာ အသုံးမချပါ၊ ဂျင်နရေတာများအဖြစ် အဓိကအသုံးပြုသည်၊ ယခုအခါ အပူဓာတ်အားလိုင်းများ၊ ရေအားလျှပ်စစ်ဓာတ်အားပေးစက်ရုံများ၊ ရေနွေးငွေ့တာဘိုင်များ၊ ဟိုက်ဒရောလစ်တာဘိုင်များသည် အခြေခံအားဖြင့် synchronous motors များဖြစ်သည်။
5. Three-phase AC motor - asynchronous electric motors speed regulation
Asynchronous motor speed regulation- သီအိုရီအရ၊ asynchronous motor control AC frequency, voltage, or rotor resistance, motor pole distribution သည် speed regulation ဖြစ်သည်၊ သို့သော် လက်တွေ့တွင် အောင်မြင်ရန် frequency နှင့် voltage ကိုချိန်ညှိသည့်နည်းလမ်းဖြင့် အဆုံးမရှိသော speed regulation ကိုအောင်မြင်ရန် လက်တွေ့တွင်။
ဗို့အားစည်းမျဉ်းအမြန်နှုန်းအကွာအဝေးမကြီးမားသောကြောင့်, ယေဘုယျအားဖြင့်သာအမြန်နှုန်းထိန်းချုပ်မှုလိုအပ်ချက်များမြင့်မားအခါသမယတွင်အသုံးပြုနိုင်ပါသည်, လျှောက်လွှာကိုကျယ်ပြန့်မပေးပါ။
ပြောင်းလဲနိုင်သော ကြိမ်နှုန်းအမြန်နှုန်း စည်းမျဉ်း- ကြိမ်နှုန်းအကြောင်းပြောလျှင် ၎င်းကို ကျွန်ုပ်တို့ ကြားဖူးပေမည်။
ကြိမ်နှုန်းပြောင်းလဲခြင်း၏အမည်အပြည့်အစုံမှာ Variable Voltage Variable Frequency (VVVF) ဖြစ်ပြီး၊ ဆိုလိုသည်မှာ ကြိမ်နှုန်းပြောင်းလဲသောအခါတွင် ဗို့အားပြောင်းလဲသွားခြင်းဖြစ်ပြီး၊ ထို့ကြောင့် အကွဲကွဲမော်တာ၏ အမြန်နှုန်းအကွာအဝေးသည် အလုံအလောက်ကြီးမားစေရန်ဖြစ်သည်။
ကြိမ်နှုန်း converters များကို ကျယ်ပြန့်သော အမျိုးအစား နှစ်ခုအဖြစ် ခွဲခြားနိုင်သည်- AC-AC ကြိမ်နှုန်းပြောင်းသူများ နှင့် AC-DC ကြိမ်နှုန်းပြောင်းစက်များ။
AC-DC အင်ဗာတာ- AC ပါဝါကို ပါဝါအီလက်ထရွန်းနစ်ပစ္စည်းများမှ အခြားကြိမ်နှုန်း၏ AC ပါဝါသို့ တိုက်ရိုက်ပြောင်းလဲပါသည်။
အမြင့်ဆုံး output frequency သည် input frequency ၏ ထက်ဝက်ထက် မကျော်လွန်နိုင်ပါ၊ ထို့ကြောင့် ၎င်းကို ယေဘုယျအားဖြင့် low speed, high capacity systems များတွင်သာ အသုံးပြုကြပြီး ကြီးမားသော gear reducer လိုအပ်မှုကို ဖယ်ရှားပေးနိုင်ပါသည်။
AC-DC အင်ဗာတာသည် AC ပါဝါအား DC သို့ ဦးစွာပြုပြင်ပေးမည်ဖြစ်ပြီး၊ ထို့နောက် PWM နည်းပညာဖြင့် အင်ဗာတာမှတစ်ဆင့် ထိန်းချုပ်နိုင်သော ကြိမ်နှုန်းနှင့် ဗို့အားဖြင့် AC အဖြစ်သို့ ပြောင်းလဲပေးမည်၊ ဤအင်ဗာတာအမျိုးအစားသည် ပြောင်းလဲနိုင်သော ဗို့အားနှင့် ကြိမ်နှုန်းများစွာကို သိရှိနိုင်သည်။
လျှပ်စစ်ကားများအတွက်၊ asynchronous motor သည် တာရှည်ခံပြီး ခိုင်ခံ့သော overload capacity ရှိပြီး control algorithm သည် အလွန်ရင့်ကျက်သောကြောင့် ၎င်းကို လုံးဝအသုံးပြုနိုင်ပါသည်။
6. Three-phase AC motor - synchronous motor ၏ အမြန်နှုန်း စည်းမျဉ်း
synchronous motor speed စည်းမျဉ်း-
synchronous machines များတွင် turndown rate မရှိသည့်အပြင် တည်ဆောက်ပုံအား ဆုံးဖြတ်သောအခါ control voltage သည် speed ကို မပြောင်းလဲနိုင်သောကြောင့် frequency converters များမပေါ်မီတွင် synchronous motors များကို လုံးလုံးလျားလျား ထိန်းချုပ်ခြင်းမရှိပါ။
ကြိမ်နှုန်း converter ၏ အသွင်အပြင်သည် AC synchronous motor တွင် ကြီးမားသော အမြန်နှုန်း စည်းမျဉ်းအကွာအဝေးကို ဖြစ်ပေါ်စေသည်၊ အကြောင်းမှာ ၎င်း၏ ရဟတ်တွင် သီးခြား excitation (permanent magnet သို့မဟုတ် electric excitation) ပါရှိသောကြောင့် ၎င်း၏ speed regulation range သည် asynchronous motor ထက် ပိုကျယ်သည်၊ synchronous motor တွင်၊ ဘဝသစ်ကို ပေးအပ်ခဲ့သည်။
Synchronous motor variable voltage variable frequency speed control system ကို အခြားသော-ထိန်းချုပ်ထားသော variable speed control နှင့် self-controlled variable speed control ဟူ၍ ခွဲခြားနိုင်သည်။
အခြားထိန်းချုပ်ထားသော မပြောင်းလဲနိုင်သော ကြိမ်နှုန်းအမြန်နှုန်း စည်းမျဉ်းအတွက်၊ ၎င်းသည် ၎င်း၏သင်္ချာပုံစံအတိုင်း SVPWM နှင့် အခြားသော ထိန်းချုပ်မှုနည်းလမ်းများဖြင့် ထိန်းချုပ်နိုင်သည့် ကွဲလွဲနိုင်သော ကြိမ်နှုန်းစည်းမျဉ်းနှင့် ဆင်တူပြီး ၎င်း၏စွမ်းဆောင်ရည်သည် သာမန် AC asynchronous မော်တာထက် ပိုမိုကောင်းမွန်ပါသည်။
ကွန်မြူတာတာမရှိသော မော်တာကဲ့သို့သော ဖွံ့ဖြိုးတိုးတက်မှုလုပ်ငန်းစဉ်တွင် အမည်အမျိုးမျိုးရှိရန် ကိုယ်ပိုင်ထိန်းချုပ်ထားသော အင်ဗာတာ synchronous မော်တာ၊ အမြဲတမ်းသံလိုက်များကိုအသုံးပြုပြီး three-phase sine wave ကိုထည့်သွင်းသည့်အခါ၊ ၎င်းကို sine wave အမြဲတမ်းသံလိုက် synchronous motor ဟုခေါ်နိုင်သည်။ အကယ်၍ စတုရန်းလှိုင်းကို ထည့်သွင်းပါက၊ ၎င်းကို trapezoidal wave အမြဲတမ်းသံလိုက် synchronous motor ဟုခေါ်နိုင်သည်၊ ၎င်းသည် ယခင်ကပြောခဲ့သည့် brushless DC စက် (BLDM) နှင့် ဆင်တူသည်)၊ ကျွန်ုပ်တို့သည် ရက်ပ်စက်ဝိုင်းကြီးတစ်ခုသို့ ပြန်လှည့်သွားသည်ဟု ခံစားရမည်မဟုတ်သော်လည်း သင်၊ ပြောင်းလဲနိုင်သောအမြန်နှုန်းကို ယခုပိုမိုနက်ရှိုင်းစွာနားလည်ထားရမည်ဖြစ်သောကြောင့် DC input ကိုအသုံးပြုသည့်အခါ brushless DC motor သည် synchronous motor frequency conversion technology (အမြဲတမ်းသံလိုက် synchronous motor ကဲ့သို့တည်ဆောက်ပုံတူ) ကို Model3 တွင် DC brushless motor ကိုအသုံးပြုခြင်းတွင်၊ .
7. Single-phase AC asynchronous motor - single-phase AC စီးရီး-စိတ်လှုပ်ရှားဖွယ်ရာ မော်တာ (brush)
စီးရီး-စိတ်လှုပ်ရှားဖွယ်ရာ မော်တာ သို့မဟုတ် universalMotor ဟု အများအားဖြင့် လူသိများသော Single-phase AC စီးရီး-စိတ်လှုပ်ရှားဖွယ်ရာ မော်တာ (UniversalMotor နိုင်ငံခြားအမည်၊ AC နှင့် DC universal ကြောင့်)၊ armature winding နှင့် excitation winding တို့သည် အတူတကွ အလုပ်လုပ်ရန် ဆက်တိုက်ချိတ်ဆက်ထားသည်။
Single-phase series-excited motor ကိုလည်း AC-DC dual-use series-excited motor ဟုခေါ်သည်၊ ၎င်းသည် AC power သို့မဟုတ် DC power ဖြင့်အလုပ်လုပ်နိုင်သည်။
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Single-phase စီးရီး-စိတ်လှုပ်ရှားဖွယ်ရာ မော်တာ၏ အားသာချက်များမှာ မြန်နှုန်းမြင့် ၊ မြင့်မားသောစတင် torque ၊ သေးငယ်သောအရွယ်အစား ၊ ပေါ့ပါးသော ၊ လည်ပတ်မှုကို ပိတ်ဆို့ရန်မလွယ်ကူ ၊ အသုံးပြုနိုင်သော ဗို့အား၏ ကျယ်ပြန့်မှု ၊ နှင့် ဗို့အားထိန်းညှိမှု နည်းလမ်းဖြင့် အမြန်နှုန်း ထိန်းညှိနိုင်သည် ။ ရိုးရှင်းပြီး သဘောပေါက်လွယ်သော၊
ထို့ကြောင့် ၎င်းကို ထောင့်ကြိတ်စက်၊ လက်တူးစက် အစရှိသည့် ပါဝါကိရိယာများတွင် တွင်ကျယ်စွာ အသုံးပြုကြသည်။
single-phase series-excited motor ၏ဖွဲ့စည်းပုံသည် DC series-excited motor နှင့်အလွန်ဆင်တူသည်၊ အဓိကကွာခြားချက်မှာ single-phase series-excited motor ၏ stator core ကို silicon steel laminated ဖြင့်ပြုလုပ်ထားရမည် ဖြစ်ပြီး သံလိုက်ဝင်ရိုးများ DC ၏ Laminated နှင့် Integral တည်ဆောက်ပုံ နှစ်မျိုးလုံးဖြင့် ပြုလုပ်နိုင်သည်။
Single-phase စီးရီး-စိတ်လှုပ်ရှားဖွယ်ရာ မော်တာအမြန်နှုန်းစည်းမျဉ်း၊ ဗို့အားကိုချိန်ညှိရန်အသုံးပြုသည့်နည်းလမ်းအများစုမှာ လျှပ်စစ်အလားအလာကို ပြောင်းလဲရန်ဖြစ်သည်။
single-phase series-excited motor ၏ voltage regulation method သည် input voltage ၏ phase-shifting trigger ကိုရရှိရန် SCR ၏ trigger voltage ကိုအသုံးပြုပြီး input voltage နောက်ကျသွားစေရန် controlled phase-shifting voltage regulation ကိုအသုံးပြုပါသည်။
အကောင်အထည်ဖော်ရာတွင် ဟာ့ဒ်ဝဲနှင့် ဆော့ဖ်ဝဲနည်းလမ်းများ ရှိပါသည်။
ဆီလီကွန်ထိန်းချုပ်ထားသော အမြန်နှုန်းထိန်းချုပ်မှုနည်းပညာကို အသုံးပြု၍ ထိန်းညှိထားသော ဗို့အားနည်းလမ်းတွင် ရိုးရှင်းသောလိုင်းတစ်ခု၊ သေးငယ်သောအစိတ်အပိုင်းများနှင့် ဆီလီကွန်ထိန်းချုပ်ထားသော ရိုးရှင်းပြီး ထိရောက်သောနည်းလမ်း၏ အခြားဝိသေသလက္ခဏာများပါရှိသည်။
(က) AC လက်ရှိပြောင်းလဲခြင်းမျဉ်းကွေး၊
(ခ) လက်ရှိသည် အပြုသဘောဆောင်သော လှိုင်းဝက်ရှိသောအခါ ရဟတ်၏ လှည့်ပတ်မှု ဦးတည်ချက်
(ဂ) လက်ရှိအနှုတ်တစ်ဝက်လှိုင်းဖြစ်သောအခါ ရဟတ်၏လှည့်ပတ်မှု

8. Single-phase AC asynchronous motor - single-phase AC Squirrel-cage motor (brushless)
သံလိုက်အကွေ့အကောက်များမှတဆင့် single-phase current သည် လည်ပတ်သံလိုက်စက်ကွင်းမဟုတ်ဘဲ pulsating magnetic field ကိုထုတ်ပေးသောကြောင့် single-phase asynchronous motor များကို ကိုယ်တိုင်စတင်၍မရနိုင်ပါ။
စတင်ခြင်းပြဿနာကိုဖြေရှင်းရန်အတွက် single-phase AC-powered asynchronous motors များကို two-phase အဖြစ်အမှန်တကယ်ပြုလုပ်လေ့ရှိသည်။
ပင်မအကွေ့အကောက်များကို single-phase power supply မှ တိုက်ရိုက် ပါဝါပေးပါသည်။ ဒုတိယအကွေ့အကောက်များသည် 90° ဖြင့် ပင်မအကွေ့အကောက်များနှင့် နေရာဒေသအလိုက်ကွဲပြားသည် (လျှပ်စစ်ထောင့်၊ မော်တာတိုင်အတွဲအရေအတွက်ဖြင့် ပိုင်းခြားထားသော စက်ထောင့်နှင့်ညီမျှသည်)။
ဆင့်ပွားအကွေ့အကောက်များသည် capacitor သို့မဟုတ် resistor ၏စီးရီးချိတ်ဆက်ပြီးနောက် single-phase AC power supply နှင့်ချိတ်ဆက်ထားသောကြောင့် ၎င်းမှတဆင့်ဖြတ်သန်းသွားသော current နှင့် main winding အတွင်းရှိ current သည် အချို့သောအဆင့်ကွာခြားချက်ရှိသည်။
၎င်းသည် ဓာတုသံလိုက်စက်ကွင်းအား elliptical rotating field (သို့) စက်ဝိုင်းလှည့်ကွင်းနှင့် နီးကပ်စေပါသည်။
ထို့ကြောင့် motor သည် start torque ကို ရရှိသည်။
ခုခံမှုအဆင့်ခွဲထုတ်နည်းကိုအသုံးပြုသည့်မော်တာသည်စျေးမကြီးပါ၊ ဥပမာအားဖြင့်၊ အလယ်တန်းအကွေ့အကောက်များကိုပိုမိုပါးလွှာသောဝါယာကြိုးဖြင့်အနာဖြစ်စေနိုင်သည်၊ သို့သော်အဆင့်ခွဲခြားခြင်းအကျိုးသက်ရောက်မှုသည်ညံ့ဖျင်းပြီးခုခံမှုတွင်စွမ်းအင်ကိုစားသုံးသည်။
မော်တာစတင်ပြီး သတ်မှတ်ထားသောအမြန်နှုန်းသို့ရောက်ရှိပြီးနောက်၊ ခံနိုင်ရည်ဆုံးရှုံးမှုများကိုလျှော့ချရန်နှင့် လည်ပတ်မှုစွမ်းဆောင်ရည်ကိုတိုးတက်စေရန်အတွက် မော်တာရိုးတံပေါ်တွင်တပ်ဆင်ထားသော centrifugal ခလုတ်ဖြင့် အလယ်တန်းအကွေ့အကောက်များကို များသောအားဖြင့် အလိုအလျောက်ဖယ်ရှားပေးပါသည်။
စက်စက်အသေး၊ ရေခဲသေတ္တာငယ်စသည်ဖြင့် စတင် torque လိုအပ်ချက် မမြင့်သည့် အခါများတွင် ယေဘူယျအားဖြင့် ၎င်းကို အသုံးပြုသည်။ အားနည်းချက်မှာ အရှိန်ကို ချိန်ညှိ၍မရပါ။
ပိုမိုကောင်းမွန်သော အလုပ်သွင်ပြင်လက္ခဏာများရရှိစေရန်အတွက် မော်တာ၏ စက်ဝိုင်းလည်ပတ်သံလိုက်စက်ကွင်းကို စက်ဝိုင်းပုံသံလိုက်စက်ကွင်းနှင့် နီးကပ်အောင် ပြုလုပ်နိုင်သည်။
split-phase asynchronous motor သည် ပိုမိုကောင်းမွန်သော စတင်သည့်စွမ်းဆောင်ရည် သို့မဟုတ် ပိုမိုကောင်းမွန်သောလည်ပတ်မှုလက္ခဏာများရရှိစေရန်အတွက် လိုအပ်သော capacitance (တန်ဖိုးပမာဏ) သည် ကွဲပြားပြီး အမျိုးအစားသုံးမျိုးခွဲခြားနိုင်သည်။
9. stepper motors - open-loop stepper motors များ
(Open-loop) Stepper မော်တာများသည် လျှပ်စစ်ခုန်နှုန်းအချက်ပြမှုများကို ထောင့်ပြောင်းရွေ့ပြောင်းအဖြစ် ပြောင်းလဲပေးသည့် အဖွင့်-ကွင်းဆက်ထိန်းချုပ်ထားသော မော်တာဖြစ်ပြီး အလွန်အသုံးများသည်။
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
တိကျသောနေရာချထားခြင်း၏ရည်ရွယ်ချက်ကိုအောင်မြင်ရန်အဖြစ် angular displacement ပမာဏကိုထိန်းချုပ်ရန်အတွက်ပဲမျိုးစုံအရေအတွက်ကိုထိန်းချုပ်နိုင်သည်။ တစ်ချိန်တည်းမှာပင်၊ အရှိန်ထိန်းညှိခြင်း၏ ရည်ရွယ်ချက်ကို အောင်မြင်စေရန်အတွက် မော်တာလည်ပတ်မှု၏ အမြန်နှုန်းနှင့် အရှိန်ကို ထိန်းချုပ်ရန်အတွက် သွေးခုန်နှုန်းကြိမ်နှုန်းကို ထိန်းချုပ်နိုင်သည်။
Stepper motor သည် DC ပါဝါအား အချိန်ပိုင်းခွဲဝေမှုဖြင့် multi-phase Timing control current အဖြစ် အီလက်ထရွန်းနစ် ဆားကစ်တစ်ခုအား အသုံးပြု၍ အလုပ်လုပ်သော induction motor အမျိုးအစားဖြစ်သည်။
Stepper မော်တာများသည် DC လျှပ်စီးကြောင်းဖြင့် လည်ပတ်နေသော်လည်း ၎င်းတို့သည် DC လျှပ်စစ်စွမ်းအင်ကို စက်စွမ်းအင်အဖြစ်သို့ ပြောင်းလဲပေးသည့် ပါဝါမော်တာများဖြစ်သည့် DC မော်တာများဖြစ်ပြီး၊ stepper motor များသည် open-loop control motors များဖြစ်ပြီး လျှပ်စစ်ခုန်နှုန်းအချက်ပြမှုများကို angular displacement အဖြစ်သို့ပြောင်းလဲပေးသော DC motors များဖြစ်သည်။
10. Stepper motor - stepper servo နှိုင်းယှဉ်
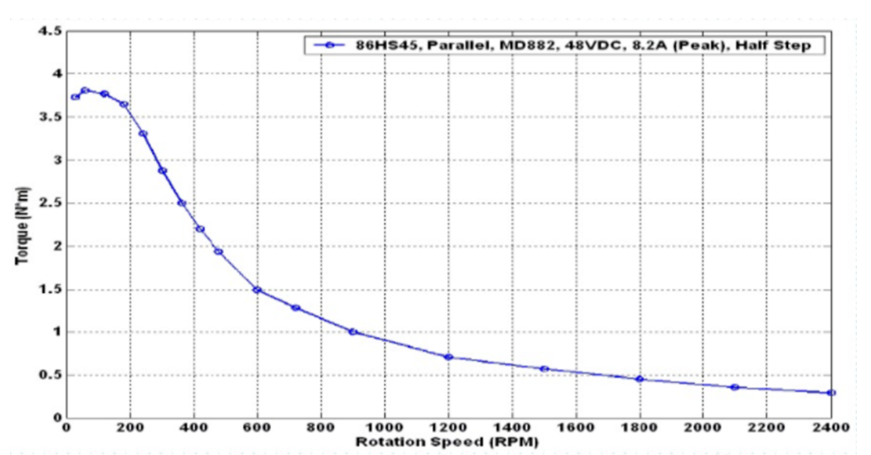
Stepper မော်တာများကို မြန်နှုန်းနိမ့် အက်ပလီကေးရှင်းများတွင် အသုံးပြုသည် - တစ်မိနစ်လျှင် 1000r/min ထက် မပိုဘဲ၊ အကောင်းဆုံး လုပ်ဆောင်နိုင်သော အကွာအဝေးမှာ 150~500r/min၊ (အပိတ်-ကွင်းပိတ် 1500 အထိ)။
60 ~ 70r/min တွင် 2 အဆင့် stepper မော်တာသည် နိမ့်သောအမြန်နှုန်း ပဲ့တင်ထပ်ခြင်းဖြစ်စဉ်၊ တုန်ခါမှုနှင့် ဆူညံမှုကို ဖြစ်ပေါ်စေသည်၊၊ လျှော့ချအချိုးအစားကိုပြောင်းလဲခြင်း၊ အပိုင်းအစများတိုးလာခြင်း၊ သံလိုက် dampers များထည့်ခြင်းစသည်တို့ကို ရှောင်ရှားရန်လိုအပ်ပါသည်။
Subdivision တိကျမှုကြိုတင်ကာကွယ်မှုများ၊ ခွဲခွဲအဆင့်သည် 4 ထက်များသောအခါ၊ step angle ၏တိကျမှုကိုအာမခံမရနိုင်ပါ၊ တိကျသောလိုအပ်ချက်များမြင့်မားသည်၊ stepper motor သို့မဟုတ် closed- loop stepper, servo မော်တာ။
(open-loop) stepper motor နှင့် servo motor 7 မျိုး ကွဲပြားသည်။
ထိန်းချုပ်မှုတိကျမှု - servo မော်တာထိန်းချုပ်မှုတိကျမှုကိုကုဒ်ပြောင်းကိရိယာအရသတ်မှတ်နိုင်ပြီးပိုမိုတိကျသည်။
B ကြိမ်နှုန်းနည်းသောလက္ခဏာများ - stepper motor များသည် low frequencies တွင်တုန်ခါမှုဖြစ်နိုင်ချေရှိပြီး servo motor များမလုပ်ဆောင်ပါ။
C moment-frequency လက္ခဏာများ - stepper motor torque သည် အမြန်နှုန်း တိုးလာသည်နှင့်အမျှ သေးငယ်သွားသည်၊ ထို့ကြောင့် ၎င်း၏ အမြင့်ဆုံး လည်ပတ်နှုန်းမှာ ယေဘုယျအားဖြင့် ဖြစ်သည်။ <1000r/min၊ အဆင့်သတ်မှတ်ထားသောအမြန်နှုန်း (ယေဘုယျအားဖြင့် 3000r/min) ရှိ servo motor သည် rated torque ကိုထုတ်ပေးနိုင်ပြီး၊ အဆက်မပြတ်ပါဝါအထွက်ထက် အဆင့်သတ်မှတ်ထားသောအမြန်နှုန်း၊ အမြင့်ဆုံးအမြန်နှုန်း 5000 r/min အထိ;
D overload capacity - stepper motor သည် overloaded မရနိုင်ပါ၊ servo motor သည် အမြင့်ဆုံး torque ကို 3 ကြိမ် overloaded လုပ်နိုင်ပါသည်။
E လည်ပတ်မှုစွမ်းဆောင်ရည် - အဖွင့်ကွင်းပတ်ထိန်းချုပ်မှုအတွက် stepper မော်တာ၊ ကွင်းပိတ်ထိန်းချုပ်သည့်အခါဆာဗာမော်တာ။
F အရှိန်တုံ့ပြန်မှု - stepper motor start-up time 0.15 ~ 0.5s, servo motor 0.05 ~ 0.1, rated 3000r/min သို့ရောက်ရှိရန် အမြန်ဆုံး 0.01s။
G ထိရောက်မှုအညွှန်းများ - stepper motor ထိရောက်မှု 60%, ဆာဗာမော်တာ 80% ခန့်။
အမှန်တကယ်အသုံးပြုမှုတွင် servo motor သည် ဈေးကြီးပြီး စျေးကြီးသောကြောင့် synchronous motor များကို ပိုမိုတွင်ကျယ်စွာအသုံးပြုကြသည်၊ အထူးသဖြင့် positioning accuracy လိုအပ်ချက်များတွင် synchronous belt drive၊ flat belt conveyor နှင့် အခြားသော အခါသမယများတွင် stepper motor ကိုအသုံးပြုလေ့ရှိပါသည်။
11. Stepper motors - အပိတ်-ကွင်းဆက် stepper မော်တာများ
Closed-loop stepper motors- အဖွင့်-ကွင်းဆက် stepper မော်တာများအပြင်၊ မော်တာ၏အဆုံးတွင် ကုဒ်ဒါတစ်ခုပါရှိသော stepper motor များပါရှိပြီး close-loop control အတွက် ခွင့်ပြုပေးပါသည်။
Stepper မော်တာများ၏ အပိတ်အဝိုင်းထိန်းချုပ်မှုသည် အနေအထား တုံ့ပြန်ချက်နှင့်/သို့မဟုတ် အလျင်တုံ့ပြန်ချက်ကို အသုံးပြု၍ ရဟတ်အနေအထားနှင့် သင့်လျော်သည့် အဆင့်အကူးအပြောင်းများကို ဆုံးဖြတ်ရန်၊ ၎င်းသည် stepper မော်တာများ၏ စွမ်းဆောင်ရည်ကို များစွာတိုးတက်စေနိုင်သည်။
အဆင့်လွန်ဖြစ်ရပ်များမပါဘဲ Servo စနစ်များ။
closed-loop stepper motor များ၏ အားသာချက်များ။
1. မြန်နှုန်းမြင့်တုံ့ပြန်မှု။ မော်တာများနှင့် နှိုင်းယှဉ်ပါက Close-loop stepper သည် positioning commands များကို အလွန်အားကောင်းသောကြောင့် positioning time သည် အလွန်တိုတောင်းပါသည်။ မကြာခဏ စတင်ခြင်း/ရပ်တန့်ခြင်းအတွက် တည်နေရာပြချိန်ကို သိသိသာသာ တိုစေနိုင်သည်။
2. သာမန် servo ထက် torque ပိုထုတ်ပေးသည်။ သာမာန် stepper စနစ်၏ ခြေလှမ်းကျခြင်း မရှိခြင်းနှင့် မြန်နှုန်းနိမ့် တုန်ခါမှုများအတွက် ဖန်တီးပါ။
3. မြင့်မားသော torque အား 100% load အောက်တွင်ပင်၊ torque ဆုံးရှုံးမှုနှင့် သာမန် stepping စနစ်များကဲ့သို့ အခြားသော ပြဿနာများကို ထည့်သွင်းစဉ်းစားခြင်းမရှိဘဲ ခြေလှမ်းလည်ပတ်မှု မဆုံးရှုံးဘဲ ထုတ်ပေးနိုင်သည်။
4. closed-loop drive ကိုအသုံးပြုခြင်းဖြင့်၊ ထိရောက်မှု 7.8 ဆအထိတိုးနိုင်ပြီး၊ output power ကို 3.3 ဆအထိတိုးနိုင်ပြီး speed ကို 3.6 ဆအထိတိုးမြှင့်နိုင်သည်။
၎င်းသည် open-loop ထိန်းချုပ်မှုထက် ပိုမိုမြင့်မားသော ပြေးနှုန်း၊ ပိုမိုတည်ငြိမ်ပြီး ချောမွေ့သောအမြန်နှုန်းကို ရရှိနိုင်သည်။
5. သာမာန် servo ၏ မိုက်ခရိုတုန်ခါမှုဖြစ်စဉ်မပါဘဲ ရပ်တန့်သွားသည့်အခါ stepper motor သည် လုံးဝရပ်သွားပါမည်။
ကုန်ကျစရိတ်သက်သာပြီး တိကျသောနေရာချထားမှုလိုအပ်သည့်အခါ ယေဘုယျရည်ရွယ်ချက် servo စနစ်၏လျှောက်လွှာကို အစားထိုးနိုင်သည်။
12. stepper motor - stepper closed-loop servo နှိုင်းယှဉ်
Closed-loop stepper မော်တာများသည် ဝန်အရွယ်အစားအရ အကွေ့အကောက်များသည့် လက်ရှိအရွယ်အစားကို အလိုအလျောက်ချိန်ညှိပေးသည်၊ အပူနှင့်တုန်ခါမှုသည် open-loop stepper ထက်နည်းသည်၊ ကုဒ်ဒါတုံ့ပြန်ချက်ပါရှိသောကြောင့် တိကျမှုသည် သာမန် stepper motors များထက်ပိုမိုမြင့်မားသည်၊ open-loop ထက် motor response servo motor များထက် stepper ပိုနှေးသည်၊ လည်ပတ်နေစဉ် အနေအထား error ရှိသည်၊ command ရပ်တန့်ပြီးနောက် error သည် မီလီစက္ကန့်အတွင်း တဖြည်းဖြည်း လျော့နည်းသွားပါမည်။
open-loop stepper ထက် မြန်နှုန်းမြင့် torque၊ 0-1500rpm အခါသမယတွင် အသုံးများသော applications များ။
အနှစ်ချုပ်အားဖြင့်- ကုန်ကျစရိတ်နည်းသော၊ မြင့်မားသောထိရောက်မှု၊ တုန်လှုပ်မှုမရှိသော၊ မိုက်ခရိုတုန်ခါမှုရပ်တန့်ခြင်း၊ တောင့်တင်းခိုင်မာမှု၊ ပြုပြင်မွမ်းမံမှုမရှိ၊ မြန်နှုန်းမြင့်၊ မြင့်မားသောတုံ့ပြန်မှုစသည်ဖြင့် ကုန်ကျစရိတ်မြင့်မားသော servo စနစ်များကို အစားထိုးခြင်း၊ အနိမ့်ဆုံး open-loop stepper စနစ်များနှင့် အခြားကုန်ကျစရိတ်သက်သာသော ဖြေရှင်းနည်းများ
13. Servo motor - အထွေထွေ ဆာဗာမော်တာ
ဆာဗိုမော်တာ (servo motor) သည် actuator motor ဟုခေါ်သော ထိန်းချုပ်မှုအမြန်နှုန်း၊ တည်နေရာတိကျမှုကို အလွန်တိကျစေပြီး ထိန်းချုပ်အရာဝတ္ထုကို မောင်းနှင်ရန်အတွက် ဗို့အားအချက်ပြမှုကို torque နှင့် အမြန်နှုန်းအဖြစ်သို့ ပြောင်းလဲပေးနိုင်သည်။
stepper motor ၏ နိယာမဖွဲ့စည်းပုံနှင့်မတူဘဲ၊ servo motor သည် control circuit ကို motor အပြင်ဘက်တွင် ထားရှိပြီး အတွင်းတွင် motor part ဖြစ်သောကြောင့် standard DC motor သို့မဟုတ် AC induction motor ဖြစ်သည်။
ဆာဗာမော်တာသည် နေရာချထားရန်အတွက် ပဲမျိုးစုံအပေါ်တွင် မှီခိုသည်။ servo motor သည် 1 pulse ကိုလက်ခံရရှိသောအခါ 1 pulse နှင့်သက်ဆိုင်သောထောင့်ဖြင့်လှည့်သည်။
မော်တာသည် ထောင့်တစ်ခုကို လှည့်သည့်အခါတိုင်း၊ ကုဒ်ဒါသည် သက်ဆိုင်ရာ တုံ့ပြန်ချက် အများအပြားကို ပေးပို့မည်ဖြစ်သည်။ servo driver မှရရှိသော တုံ့ပြန်ချက်နှင့် pulses များသည် closed-loop control အသွင်ဆောင်သောကြောင့် servo driver သည် တိကျသော positioning ကိုရရှိရန် မော်တာ၏လည်ပတ်မှုကို အလွန်တိကျစွာ ထိန်းချုပ်နိုင်မည်ဖြစ်သည်။
Servo မော်တာထိန်းချုပ်မှု- ယေဘူယျအားဖြင့် စက်မှုလုပ်ငန်းသုံး ဆာဗိုမော်တာများကို မော်တာလည်ပတ်မှု၏ ထောင့်အမြန်နှုန်း၊ ထောင့်အမြန်နှုန်းနှင့် လည်ပတ်မှုအနေအထားတို့ကို အသီးသီး တုံ့ပြန်ပေးနိုင်သည့် လက်ရှိကွင်းဆက်၊ အမြန်နှုန်းကွင်းနှင့် အနေအထားလှည့်ပတ်သုံးခုဖြင့် ထိန်းချုပ်ထားသည်။
ချစ်ပ်သည် မော်တာသုံးခု၏ တုံ့ပြန်ချက်မှတစ်ဆင့် အဆင့်တစ်ခုစီ၏ မောင်းနှင်အားကို ထိန်းချုပ်သည်၊ ထို့ကြောင့် မော်တာ၏အမြန်နှုန်းနှင့် အနေအထားကို သတ်မှတ်ဇယားအတိုင်း တိကျစွာလည်ပတ်နိုင်စေရန်။
AC servo တွင် အဆင့်သတ်မှတ်ထားသော အမြန်နှုန်းအောက်တွင် အဆက်မပြတ် torque ၏အင်္ဂါရပ်၊ ဘုံ 200W၊ 400W အနိမ့်နှင့် အလတ်စား inertia AC servo အဆင့်သတ်မှတ်အမြန်နှုန်းမှာ 3000rpm၊ အမြင့်ဆုံးအမြန်နှုန်းမှာ 5000rpm၊ မြင့်မားသောအမြန်နှုန်းဖြစ်သည်။
torque သည် လက်ရှိနှင့် အချိုးကျသောကြောင့် ၎င်းသည် သော့ခတ်ထားသောဝက်အူများ၊ ခလုတ်နှိပ်သည့်နေရာများနှင့် အဆက်မပြတ် torque လိုအပ်သည့် အခြားအချိန်များတွင် torque mode တွင် အလုပ်လုပ်နိုင်သည်။
AC servo အလုပ်လုပ်သော ဆူညံသံနှင့် တုန်ခါမှုသည် အလွန်သေးငယ်ပြီး အပူထုတ်လုပ်မှုနည်းသည်။
တူညီသော မော်တာ inertia rotor inertia သည် သေးငယ်သည်၊ 400W servo inertia သည် 57 base 2NM stepper motor ၏ rotor inertia နှင့်သာ ညီမျှသည်။
Servo သည် အချိန်တိုအတွင်း ဝန်ပိုနိုင်စွမ်းရှိသည်၊ ရွေးချယ်မှုသည် အရှိန်နှင့် အရှိန်လျော့သောအခါတွင် မော်တာပိုအားမြှောက်ကိန်းကို ထည့်သွင်းစဉ်းစားရန် လိုအပ်သည်။
servo သည် ကွင်းပိတ်ထိန်းချုပ်မှုကို အသုံးပြုပြီး ကွင်းပိတ် stepper ကဲ့သို့ တူညီသော တည်နေရာခြေရာခံ အမှားရှိသည်။
Servo သည် အသုံးမပြုမီ ၀န်ဆောင်ခပေးရန် လိုအပ်ပါသည်။
stepper နှင့် servo motor ၏မူရင်း torque သည် မလုံလောက်ပါ၊ မကြာခဏ reducer နှင့် အလုပ်လုပ်ရန် လိုအပ်သည်၊ သင်သည် reduction gear set သို့မဟုတ် planetary reducer ကိုသုံးနိုင်သည်။
6. Servo မော်တာ - servo
Servo သည် DC servo motor အမျိုးအစားဖြစ်ပြီး၊ လေယာဉ်ငယ်မော်ဒယ်များအတွက် ပထမဆုံးအသုံးပြုပြီး ယခုအခါ စက်ရုပ်အဆစ်ငယ်များအတွက် အသုံးပြုသည်။
ဖွဲ့စည်းတည်ဆောက်ပုံဆိုင်ရာ ခွဲခြမ်းစိတ်ဖြာမှုမှ၊ servo တစ်ခုတွင် သေးငယ်သော DC မော်တာတစ်ခု၊ အာရုံခံကိရိယာများ၊ ထိန်းချုပ်ချစ်ပ်များနှင့် လျှော့ချရေးဂီယာအစုံများ ပါဝင်ပြီး ပေါင်းစပ်အိမ်ရာတစ်ခုအဖြစ် တပ်ဆင်ထားသည်။
၎င်းသည် input signal မှတဆင့် rotation angle (ပုံမှန်အားဖြင့် PWM signal, but also a digital signal) ကို ထိန်းချုပ်နိုင်သည်။
၎င်းသည် ရိုးရှင်းသောဗားရှင်းဖြစ်သောကြောင့်၊ servo motor ၏မူရင်းသုံးပတ်ထိန်းချုပ်မှုကို loop တစ်ခုသို့ရိုးရှင်းစေသည်၊ ဆိုလိုသည်မှာ position loop ကိုသာရှာဖွေတွေ့ရှိပါသည်။
စျေးပေါသောဖြေရှင်းချက်သည် ခုခံအားတစ်ခုမှရှာဖွေတွေ့ရှိသည့် ပိုတက်တီယိုမီတာတစ်ခုဖြစ်ပြီး၊ အဆင့်မြင့်ဖြေရှင်းချက်တစ်ခုသည် Hall sensor သို့မဟုတ် ကုဒ်ပြောင်းကိရိယာကို အသုံးပြုမည်ဖြစ်သည်။
ယေဘူယျဆာဗာများသည် စျေးသက်သာပြီး ကျစ်လစ်သော်လည်း တိကျမှုအလွန်နည်းပြီး အနေအထားတည်ငြိမ်အောင်လုပ်ဆောင်နိုင်စွမ်း ညံ့ဖျင်းပြီး နိမ့်ကျသောလိုအပ်ချက်များစွာကို ဖြည့်ဆည်းပေးနိုင်သည်။
ပြီးခဲ့သည့် နှစ်နှစ်အတွင်း လူသုံးအဆင့်သုံး စက်ရုပ်ငယ်များ ထွန်းကားလာခြင်းကြောင့် အသေးစားနှင့် ပေါ့ပါးသော ဆာဗာများသည် အသင့်လျော်ဆုံး ပူးတွဲအစိတ်အပိုင်းများ ဖြစ်လာခဲ့သည်။
သို့သော်၊ စက်ရုပ်အဆစ်များသည် ဝေဟင်ဆားဗိုထက် စွမ်းဆောင်ရည်ပိုမိုလိုအပ်ပြီး လုပ်ငန်းသုံးထုတ်ကုန်တစ်ခုအနေဖြင့် DIY ကစားသမားများထက် အရည်အသွေးမြင့်မားသော servos လိုအပ်ပါသည်။
မှတ်ချက်ဧရိယာရှိ လျှပ်စစ်မော်တာများအကြောင်း နောက်ထပ်အချက်အလက်များကို ကျွန်ုပ်တို့နှင့်မျှဝေရန် ကြိုဆိုပါသည်။
လျှပ်စစ်မော်တာနှင့်ပတ်သက်သည့် မည်သည့်စုံစမ်းမေးမြန်းမှုများကိုမဆို ကျေးဇူးပြု၍ ပရော်ဖက်ရှင်နယ်လျှပ်စစ်မော်တာသို့ ဆက်သွယ်ပါ။ ထုတ်လုပ်သူ ၌ တရုတ် ဖော်ပြပါအတိုင်း:

Dongchun မော်တာတွင် သယ်ယူပို့ဆောင်ရေး၊ အခြေခံအဆောက်အအုံနှင့် ဆောက်လုပ်ရေးစသည့် လုပ်ငန်းအမျိုးမျိုးတွင် အသုံးပြုသည့် လျှပ်စစ်မော်တာ အများအပြားရှိသည်။
ချက်ခြင်းပြန်ကြားချက်ကို ရယူပါ။
ဆက်စပ်ပို့စ်များ-






