 콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 
전 세계 전력 소비의 거의 절반이 전기 모터에 의해 소비되므로, 전기 모터의 높은 효율은 세계의 에너지 문제를 해결하는 가장 효과적인 방법이라고 합니다.
종류 전기 모터
일반적으로 자기장 내 전류의 흐름에 의해 발생하는 힘이 회전 작용으로 변환되는 것을 말하며, 넓은 범위에는 선형 작용도 포함됩니다.
모터를 구동하는 데 사용되는 전원 공급 장치의 유형에 따라 DC 모터와 AC 전기 모터.
그리고 모터 회전 원리에 따라 크게 다음과 같은 범주로 나눌 수 있습니다. (특수 모터 제외)
DC 전동기/DC(직류) 모터
브러시 모터
널리 사용되는 브러시 모터는 일반적으로 DC 전동기라고 합니다.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
브러시리스 DC 모터
브러시리스 DC 모터는 브러시나 정류자를 사용하지 않고 트랜지스터 등의 스위칭 기능을 이용해 전류를 전환해 회전 동작을 수행한다.
스테퍼 모터.
이 모터는 펄스 전력과 동기적으로 작동하므로 펄스 유도 모터라고도 합니다.
정확한 위치 결정 작업을 쉽게 달성할 수 있는 것이 특징입니다.
AC 모터
비동기 모터
AC 전력은 고정자에서 회전 자기장을 생성하고, 이는 다시 회전자에 유도 전류를 생성하며, 이 전류에서 AC 유도 모터의 상호 회전이 발생합니다.
동기 모터
AC 전원은 회전 자기장을 생성하고 자극으로 인해 회전자가 회전합니다.
-회전 속도는 다행스럽게도 전원 공급 장치의 주파수와 동기화됩니다.
전류, 자기장 및 힘에 대하여
먼저, 이후의 모터 원리 설명을 위해 전류, 자기장 및 힘에 관한 기본 법칙/법칙을 검토해 보겠습니다.
향수를 불러일으키는 느낌이 있지만, 평소에 자기 부품을 사용하지 않으면 이 지식을 잊어버리기 쉽습니다.
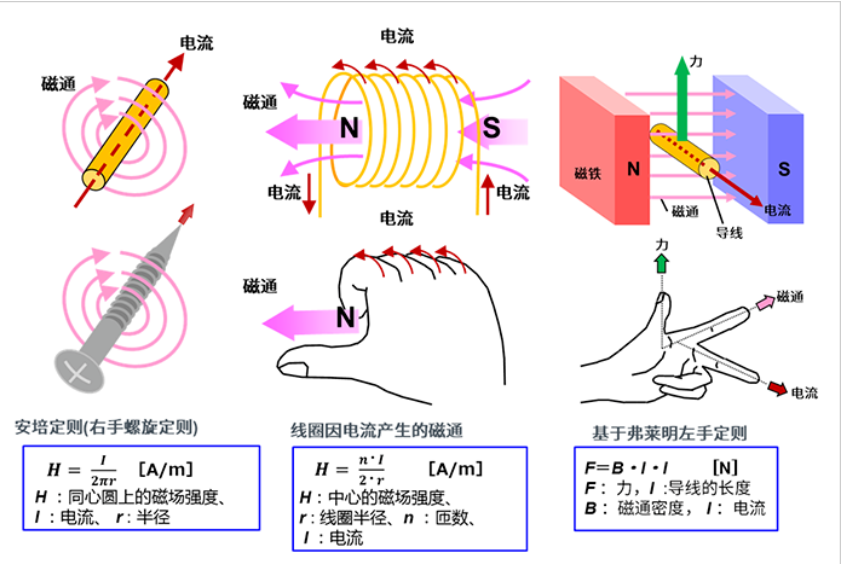
설명하기 위해 그림과 공식을 결합합니다.
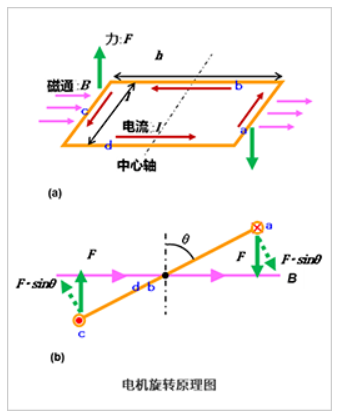
와이어 프레임이 직사각형인 경우 전류에 작용하는 힘이 고려됩니다.
변 a와 c의 부분에 작용하는 힘 F는 다음과 같습니다.
토크는 중심축을 중심축으로 하여 발생됩니다.
예를 들어 회전 각도가 θ만 있는 상태를 고려하면 b와 d에 직각으로 작용하는 힘은 sinθ이므로 a 부분의 토크 Ta는 다음과 같이 주어진다.
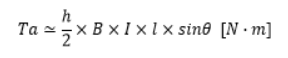
마찬가지로 c부분을 고려하면 토크가 2배가 되어 다음 식으로 계산된 토크가 발생한다.

직사각형의 넓이는 S = h・l이므로 이를 위의 식에 대입하면 다음과 같은 결과가 나온다.

이 공식은 직사각형뿐만 아니라 원과 같은 다른 일반적인 모양에도 적용됩니다. 모터는 이 원리를 이용합니다.
전기 모터는 어떻게 회전합니까?
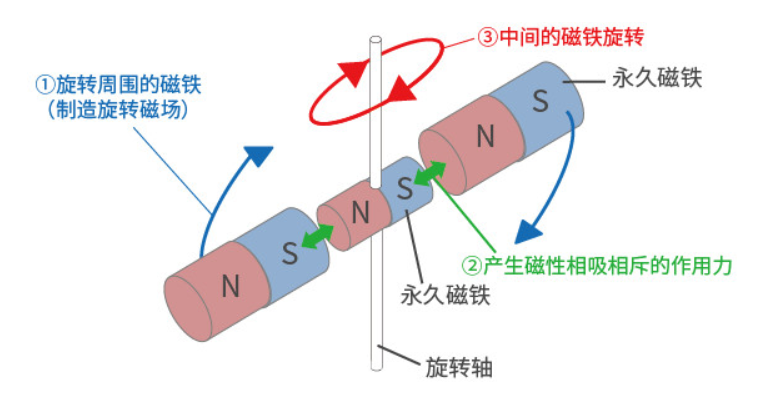
1) 유도전동기는 자석과 자기력의 도움으로 회전합니다.
회전축이 있는 영구자석 주위에,
① 자석을 회전시키면(회전 자기장이 생성되도록),
② 그러면 N극과 S극은 서로 다른 극에서 서로 끌어당기고 같은 수준에서 서로 밀어내는 원리에 따라,
③ 회전축이 있는 자석이 회전합니다.
이것이 AC 모터 회전의 기본 원리입니다.
도체에 흐르는 전류는 도체 주위에 회전 자기장(자기력)을 발생시켜 자석이 회전하게 되는데, 이는 사실상 이와 같은 작용 상태입니다.
또한, 와이어를 코일 형태로 감으면 자기력이 합성되어 N극과 S극을 생성하는 큰 자기장 플럭스(flux)가 생성됩니다.
또한, 코일 모양의 와이어에 철심을 삽입함으로써 자력선이 통과하기 쉬워지고 더 강한 자력을 발생시킬 수 있습니다.
2) 실제 회전하는 모터
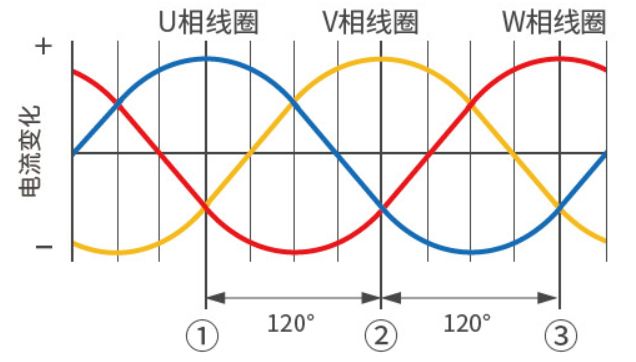
여기서는 회전모터의 실제적인 방법으로 3상 교류모터와 코일을 이용하여 회전자계를 생성하는 방법을 소개한다.
(3상 AC 산업용 모터는 위상이 120° 떨어진 AC 신호입니다.)
위 ① 상태의 합성 자기장은 아래 그림 ①에 해당합니다.
위 ② 상태의 합성 자기장은 아래 그림 ②에 해당합니다.
위 ③ 상태의 합성 자기장은 아래 그림 ③에 해당합니다.
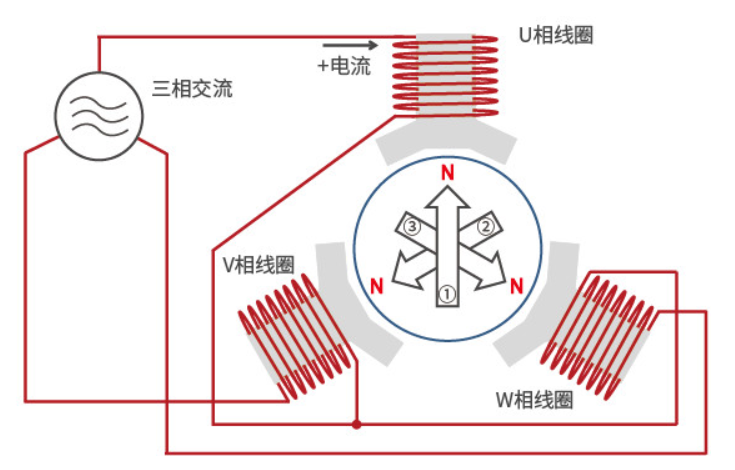
위에서 언급한 바와 같이 권선형 코어의 코일은 120° 간격으로 U상 코일, V상 코일, W상 코일의 3상으로 나누어지며, 고전압을 갖는 코일은 N극을 생성하고, S극을 생성하는 저전압 코일.

사인파에 따라 각 위상이 바뀌므로 각 코일에서 발생하는 극성(N극, S극)과 자기장(자기력)이 달라집니다.
이때, 단독으로 N극을 발생시키는 코일은 U상 코일 → V상 코일 → W상 코일 → U상 코일의 순으로 변화하여 회전이 일어난다.

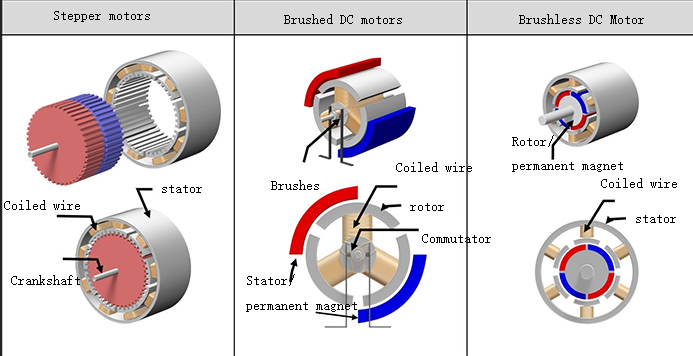
소형 모터의 구조
다음 그림은 스테퍼 모터, 브러시 DC(DC) 모터, 브러시리스 DC(DC) 모터 등 세 가지 유형의 산업용 모터의 대략적인 구조와 비교를 제공합니다.
이들 모터의 기본 구성품은 주로 코일, 자석, 회전자로 이루어지며, 종류에 따라 코일 고정형과 자석 고정형도 있습니다.
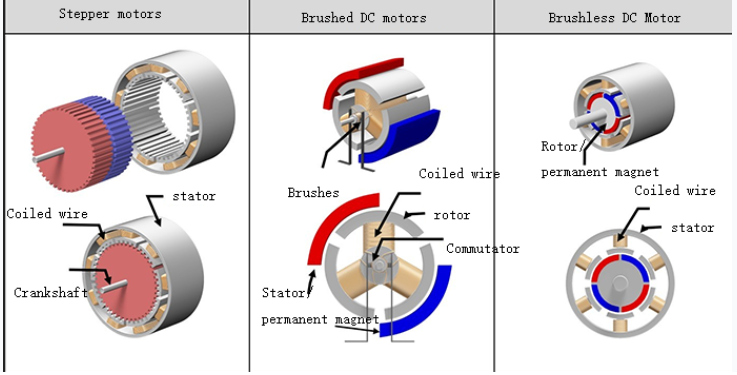
다음은 예제 다이어그램과 관련된 구조에 대한 설명입니다. 좀 더 자세히 나누어 보면 다른 구조가 있을 수 있으므로, 본 논문에서 제시하는 구조는 큰 틀 아래 있다는 점을 이해해 주시기 바랍니다.
여기서 스테퍼 모터의 코일은 바깥쪽에 고정되어 있고 자석은 안쪽에서 회전합니다.
여기서 브러시드 DC 모터의 자석은 바깥쪽에 고정되고 코일은 안쪽에서 회전합니다. 티
브러시와 정류자는 코일에 전원을 공급하고 전류의 방향을 바꾸는 역할을 합니다.
브러시리스 모터의 경우 코일은 외부에 고정되고 자석은 내부에서 회전합니다.
브러시리스 모터는 모터의 종류가 다르기 때문에 기본 구성 요소가 동일하더라도 구조가 다릅니다. 자세한 내용은 각 섹션에서 설명하겠습니다.
브러시 모터
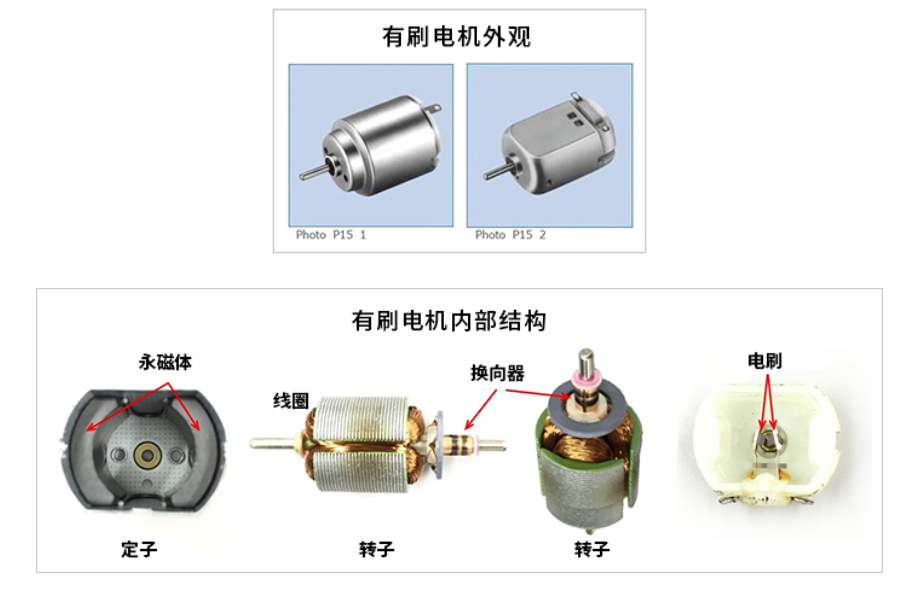
브러시드 DC 모터의 구조
아래는 모델에 자주 사용되는 브러시드 DC 모터의 모습과 일반적인 2극(자석 2개) 3슬롯(3코일)형 모터의 고장을 모식적으로 나타낸 것이다. 아마도 많은 분들이 DC전기모터를 분해하고 자석을 빼낸 경험이 있으실 겁니다.
브러시 DC 모터의 영구 자석은 고정되어 있고 브러시 DC 모터의 코일은 내부 중심을 중심으로 회전할 수 있음을 알 수 있습니다.
The fixed side is called the "stator" and the rotating side is called the "rotor".
다음은 구조의 개념을 표현한 구조도이다.
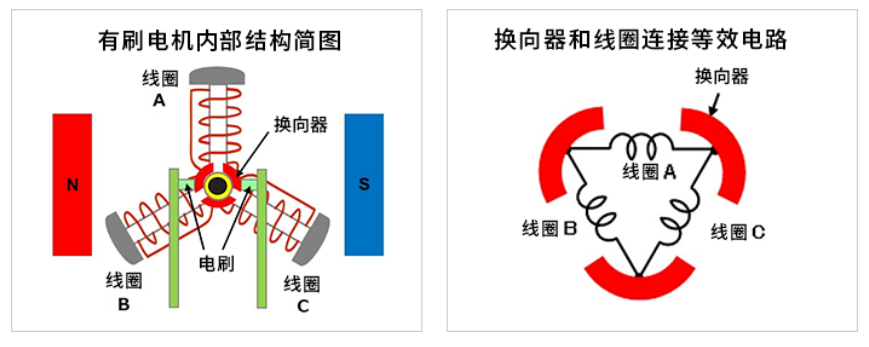
회전 중심축의 주변에는 3개의 정류자(전류 전환을 위한 구부러진 금속 시트)가 있습니다.
서로 접촉을 피하기 위해 정류자는 120° 간격으로 구성됩니다(360° ¼ 3개). 정류자는 샤프트의 회전에 따라 회전합니다.
하나의 정류자는 한쪽 코일단과 다른쪽 코일단에 연결되며, 3개의 정류자와 3개의 코일이 하나의 회로망으로서 하나의 전체(링)를 이룬다.
두 개의 브러시가 0°와 180°로 고정되어 정류자와 접촉합니다.
외부 DC 전원 공급 장치가 브러시에 연결되고 전류는 경로 브러시 → 정류자 → 코일 → 브러시로 흐릅니다.
브러시 DC 모터의 회전 원리
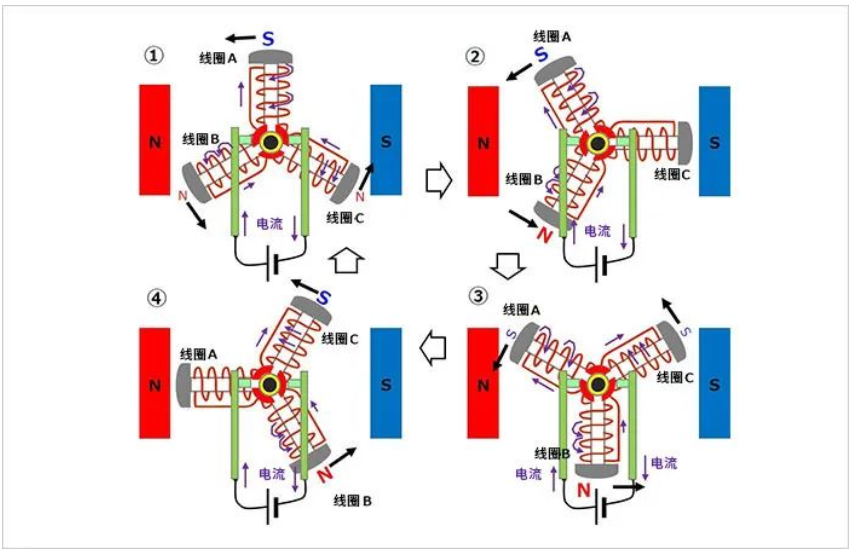
① 초기상태에서 반시계방향으로 회전
코일 A는 최상부에 위치하며 전동공구 공급장치와 브러시를 연결하며, 왼쪽을 (+), 오른쪽을 (-)로 설정합니다.
왼쪽 브러시에서 정류자를 통해 코일 A로 큰 전류가 흐릅니다.
코일 A의 상부(외부)가 S극이 되는 구조입니다.
그리고 코일 A에서 발생한 전류의 1/2이 왼쪽 브러시에서 코일 A의 반대 방향으로 코일 B와 C로 흐르므로 코일 B와 C의 바깥 쪽은 약한 N극이 됩니다(그림에서 약간 작은 글자로 표시됨). 수치).
이러한 코일에서 생성된 자기장과 자석의 반발력 및 인력 효과로 인해 코일이 시계 반대 방향으로 회전하는 힘을 받게 됩니다.
② 시계 반대 방향으로 추가 회전
다음으로, 코일 A가 반시계 방향으로 30° 회전한 상태에서 오른쪽 브러시가 양쪽 정류자에 접촉되어 있다고 가정합니다.
코일 A의 전류는 왼쪽 브러시에서 오른쪽 브러시를 거쳐 연속적으로 흐르고 코일의 바깥쪽은 S극을 유지합니다.
코일 A와 동일한 전류가 코일 B에 흐르고, 코일 B의 바깥쪽이 N극이 강해집니다.
코일 C의 끝은 브러시에 의해 단락되므로 전류가 흐르지 않으며 자기장이 생성되지 않습니다.
이 경우에도 반시계방향으로 회전하는 힘이 존재합니다.
③에서 ④까지 위쪽 코일은 왼쪽으로 계속 이동하는 힘을 받고, 아래쪽 코일은 오른쪽으로 계속 이동하는 힘을 받으며 반시계 방향으로 계속 회전합니다.
③, ④로 코일이 30°씩 회전할 때, 코일이 중심수평축 위에 있을 때 코일의 바깥쪽이 S극이 되며, 코일이 아래에 있으면 N극이 되어 동작이 반복됩니다.
즉, 상부 코일은 왼쪽으로 이동하는 힘을 반복적으로 받고, 하부 코일은 오른쪽(둘 다 반시계 방향)으로 이동하는 힘을 반복적으로 받습니다. 이로 인해 로터가 항상 시계 반대 방향으로 회전하게 됩니다.
반대편 왼쪽 브러시(-)와 오른쪽 브러시(+)에 전원을 연결하면 코일의 고정자 권선에 반대 방향으로 자기장이 발생하므로 코일에 가해지는 힘은 반대 방향으로 움직여 시계방향 회전이 된다 .
또한, 전원이 차단되면 브러시 모터의 회전자는 회전을 유지하는 자기장이 박탈되어 회전을 멈춥니다.
3상 전파 브러시리스 모터
3상 전파 Brushless 모터의 외관 및 구조
다음 그림은 브러시리스 모터의 외관과 구조의 예를 보여줍니다.
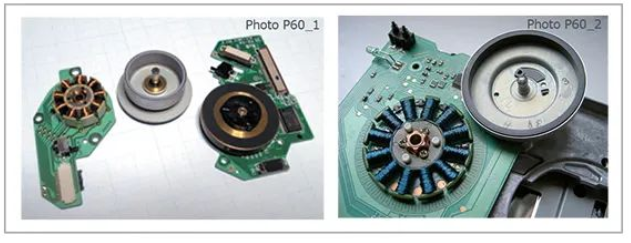
왼쪽은 디스크 재생 장치에서 디스크를 회전시키는 데 사용되는 스핀들 모터의 예입니다. 3상 x 3의 9개 코일이 있습니다. 오른쪽에는 12개 코일(3상 x 4)이 있는 FDD 장치용 스핀들 모터의 예가 있습니다. 코일은 보드에 고정되어 있으며 코어에 감겨 있습니다.
코일 오른쪽의 원판 모양 부분이 영구자석 회전자입니다. 코일의 중앙에 회전자축이 삽입되어 코일부분을 덮고, 영구자석이 코일의 둘레를 둘러싸게 됩니다.
3상 전파 브러시리스 모터의 내부 구조와 코일 연결의 등가 회로
다음은 코일접속부의 내부구조와 등가회로에 대한 스케치이다.
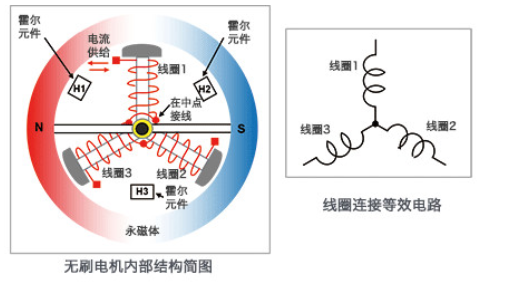
이 내부 구조 스케치는 매우 간단한 구조의 2극(자석 2개) 3슬롯(3코일) 모터의 예입니다. 동일한 수의 극과 슬롯을 갖는 브러시드 모터의 구조와 유사하지만, 코일측이 고정되어 있고 자석이 회전할 수 있다는 점이 다릅니다. 물론 브러쉬는 없습니다.
이 경우 코일을 Y자 형태로 연결하고 반도체 소자를 이용하여 코일에 전류를 공급함으로써 회전하는 자석의 위치에 따라 전류의 유입과 유출을 제어한다.
이 예에서는 홀 요소를 사용하여 자석의 위치를 감지합니다. 코일과 코일 사이에 홀 소자(Hall Element)를 구성하여 발생하는 전압을 감지하여 자기장의 세기에 따른 위치 정보로 활용합니다. 앞서 제공된 FDD 스핀들 모터 이미지에서 코일과 코일 사이(코일 위)의 위치를 감지하는 데 사용되는 홀 요소도 볼 수 있습니다.
홀 요소는 자기 센서로 잘 알려져 있습니다.
자기장의 크기를 전압의 크기로 변환하고 자기장의 방향을 양수 또는 음수로 나타낼 수 있습니다.
아래는 홀 효과를 보여주는 다이어그램입니다.
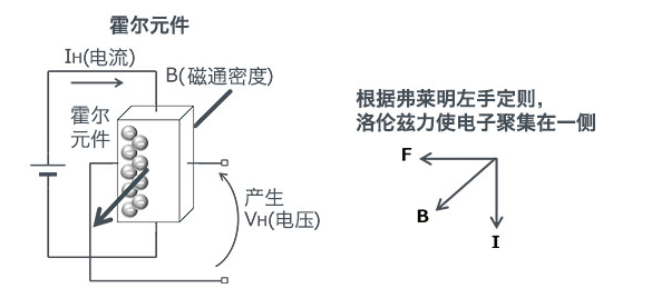
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
결과적인 전압 VH는 다음 식으로 표현된다.
VH = (KH / d)・IH・B ※KH: 홀 계수, d: 자속 침투면의 두께
공식에서 알 수 있듯이 전류가 높을수록 전압도 높아집니다. 이 속성은 회전자(자석)의 위치를 감지하는 데 자주 사용됩니다.
3상 전파 브러시리스 모터의 회전 원리
브러시리스 모터의 회전원리를 아래의 ①~⑥단계로 설명하겠습니다. 여기서는 이해를 돕기 위해 영구자석을 원형에서 직사각형으로 단순화하였습니다.
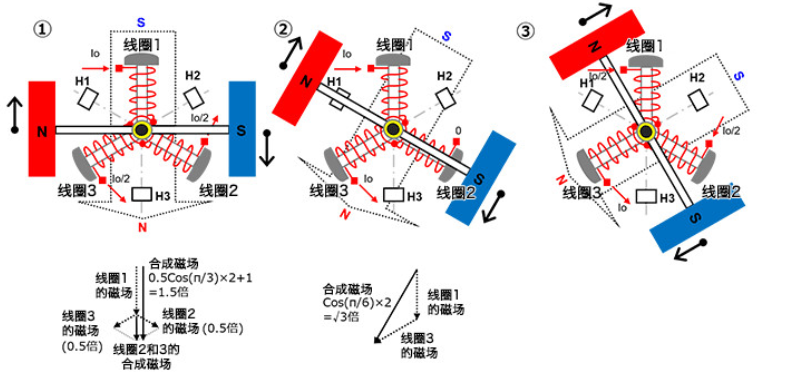
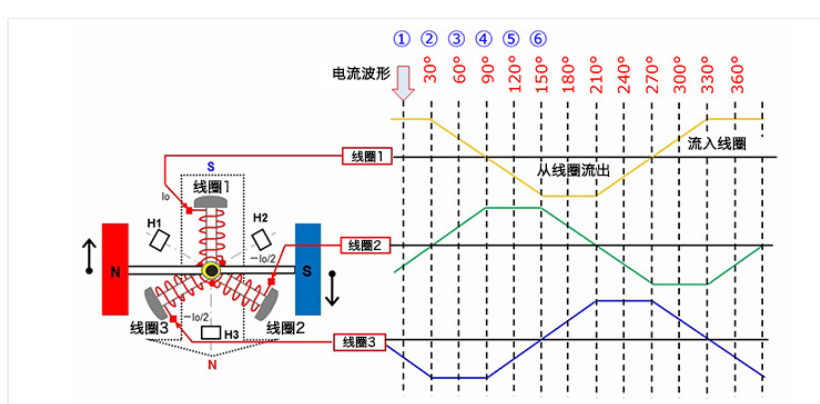
①
3상 코일에서 코일 1을 시계의 12시 방향에 고정하고, 코일 2를 시계의 4시 방향에 고정하고, 코일 3을 시계의 8시 방향에 고정한다고 가정합니다. 2극 영구자석의 N극을 왼쪽에, S극을 오른쪽에 두고 회전이 가능하도록 한다.
코일 1에 전류 Io를 흐르게 하여 코일 외부에 S극 자기장을 생성합니다. 전류 Io/2가 코일 2와 코일 3에서 흘러 코일 외부에 N극 자기장이 생성되도록 합니다.
코일 2와 3의 자기장을 벡터 합성하면 아래쪽으로 N극 자기장이 생성되는데, 이는 전류 Io가 코일을 통과할 때 생성되는 자기장의 크기의 0.5배이고, 코일을 통과할 때 생성되는 자기장의 크기는 1.5배가 된다. 이는 코일 1의 자기장에 추가됩니다. 이는 영구자석에 대해 90° 각도로 합성 자기장을 생성하여 최대 토크가 발생하고 영구자석이 시계 방향으로 회전합니다.
회전 위치에 따라 코일 2의 전류가 감소하고 코일 3의 전류가 증가하면 합성 자기장도 시계 방향으로 회전하고 영구 자석은 계속 회전합니다.
②
30° 회전한 상태에서는 전류 Io가 코일 1에 흘러 코일 2의 전류가 0이 되고 전류 Io가 코일 3에서 흘러나옵니다.
코일 1의 바깥쪽이 S극이 되고, 코일 3의 바깥쪽이 N극이 됩니다. 벡터가 합성되면 생성된 자기장은 전류 Io가 하나의 코일을 통과할 때 생성된 자기장의 √3(≒1.72)배입니다. 이는 또한 영구자석의 자기장에 대해 90° 각도로 합성 자기장을 생성하며 시계 방향으로 회전합니다.
회전 위치에 따라 코일 1의 유입 전류 Io가 감소하면 코일 2의 유입 전류는 0에서 증가하고 코일 3의 유출 전류는 Io로 증가하면 합성 자기장도 시계 방향으로 회전하며 영구 자석은 계속 회전합니다.
각 상의 전류가 정현파라고 가정하면, 여기서 전류값은 Io × sin(π⁄3) = Io × √3⁄2입니다. 자기장의 벡터 합성에 의해 총 자기장의 크기는 하나의 코일에서 생성된 자기장의 (√3⁄2)2 × 2 = 1.5배입니다. 각 상의 전류가 정현파일 때, 벡터 합성 자기장의 크기는 영구자석의 위치에 관계없이 하나의 코일이 생성하는 자기장의 1.5배이며, 자기장은 코일에 대해 90°의 각도를 이룬다. 영구 자석의 자기장.
③
30° 회전이 계속된 상태에서 전류 Io/2는 코일 1로 흐르고, 전류 Io/2는 코일 2로 흐르고, 전류 Io는 코일 3으로 흐른다.
코일 1의 바깥쪽이 S극이 되고, 코일 2의 바깥쪽도 S극이 되며, 코일 3의 바깥쪽이 N극이 됩니다. 벡터가 합성되면 생성되는 자기장은 전류 Io가 하나의 코일에 흐를 때 생성되는 자기장의 1.5배가 됩니다(1과 동일). 여기서도 영구자석의 자기장과 90° 각도로 합성 자기장이 생성되어 시계방향으로 회전하게 됩니다.
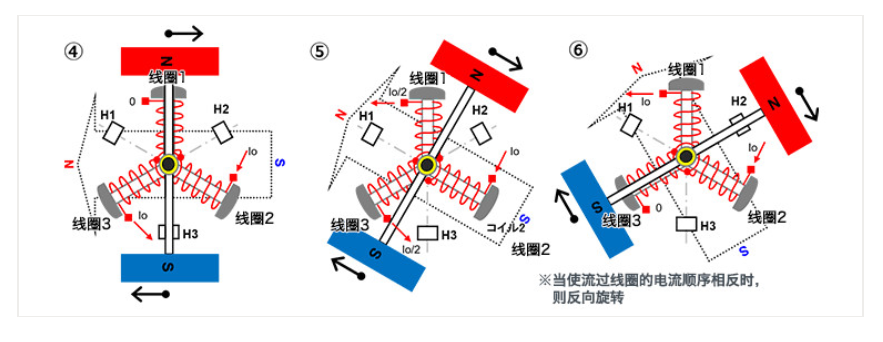
④~⑥
① ~ ③과 같은 방법으로 회전시킵니다.
이와 같이 코일에 흐르는 전류가 영구자석의 위치에 따라 순차적으로 연속적으로 전환되면 영구자석은 고정된 방향으로 회전하게 된다. 마찬가지로 전류가 바뀌고 합성 자기장의 방향이 바뀌면 시계 반대 방향으로 회전합니다.
다음 다이어그램은 위의 각 단계 ① ~ ⑥에 대한 각 코일의 전류를 연속적으로 보여줍니다. 전류 변화와 회전 사이의 관계는 위의 설명을 통해 이해되어야 합니다.
스테퍼 모터
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
스테퍼 모터의 구조(2상 바이폴라)
다음 다이어그램은 왼쪽에서 오른쪽으로 스테퍼 모터의 외관 예, 내부 구조 스케치, 구조 개념 스케치를 보여줍니다.
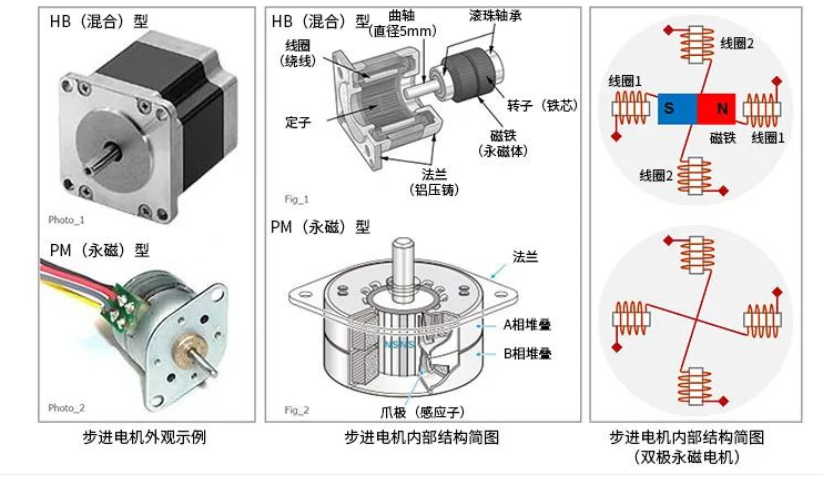
외관예에서는 HB(하이브리드)타입과 PM(영구자석)타입 스테퍼모터의 외관을 보여드립니다. 중앙의 구조도는 HB형과 PM형에 대해서도 나와 있습니다.
스테퍼모터는 코일이 고정되어 있고 영구자석이 회전하는 구조이다. 오른쪽의 스테퍼 모터 내부 구조 개념도는 2상(2세트) 코일을 사용한 PM 모터의 예입니다. 기본 스테퍼 모터 구조 예에서는 코일이 외부에 구성되고 영구 자석이 내부에 구성됩니다. 2상 코일 외에 3상, 5상 등 상수가 많은 타입도 있습니다.
일부 스테퍼 모터는 다른 구조를 가지고 있지만 본 논문에서는 작동 원리를 쉽게 소개하기 위해 스테퍼 모터의 기본 구조를 제공합니다. 본 논문을 통해 우리는 고정코일과 회전영구자석을 갖는 스테퍼 모터의 기본 구조를 이해하고자 한다.
스테퍼 모터의 기본 작동 원리(단상 여자)
다음 다이어그램은 스테퍼 모터의 기본 작동 원리를 소개하는 데 사용됩니다. 위의 2상 바이폴라형 코일의 각 상(코일 세트)에 대한 여자의 예입니다. 그림의 전제는 상태가 ①에서 ④로 변한다는 것입니다. 코일은 각각 코일 1과 코일 2로 구성됩니다. 또한 전류 화살표는 전류 흐름 방향을 나타냅니다.
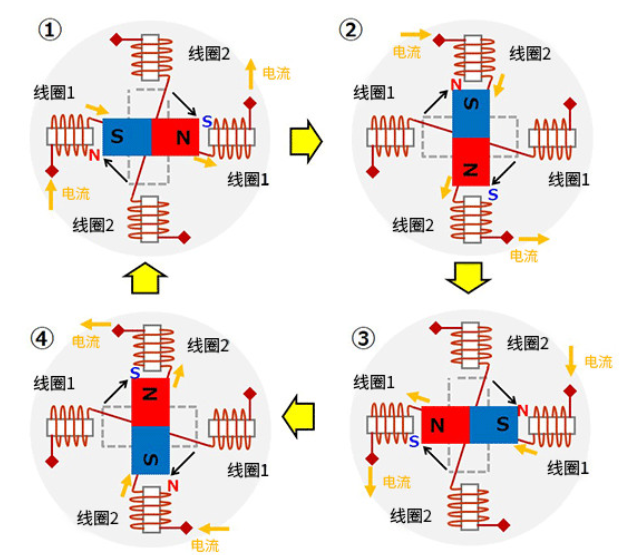
①
・코일 1의 왼쪽에서 전류가 흐르고 코일 1의 오른쪽에서 전류가 흐르도록 합니다.
・코일 2에는 전류가 흐르지 않도록 하십시오.
・이때, 왼쪽 코일 1의 안쪽이 N이 되고, 오른쪽 코일 1의 안쪽이 S가 됩니다.
・그 결과, 중앙의 영구자석은 코일(1)의 자기장에 이끌려 좌측 S, 우측 N으로 변화하여 정지하게 된다.
②
・코일 1의 전류를 정지하여 코일 2의 위쪽에서 전류가 유입되고 코일 2의 아래쪽에서 전류가 흘러나갑니다.
・상부 코일 2의 안쪽이 N으로 바뀌고, 아래쪽 코일 2의 안쪽이 S로 변합니다.
・영구자석은 자기장에 끌려 시계방향으로 90° 회전하여 정지합니다.
③
・코일 1의 오른쪽에서 전류가 유입되고 코일 1의 왼쪽에서 전류가 흐르도록 코일 2의 전류가 정지됩니다.
・왼쪽 코일 1의 안쪽이 S가 되고, 오른쪽 코일 1의 안쪽이 N이 됩니다.
・영구자석은 자기장에 끌려 시계방향으로 90° 회전하여 정지합니다.
④
・코일 2의 아래쪽에서 전류가 유입되고 코일 2의 위쪽에서 전류가 흐르도록 코일 1의 전류를 차단합니다.
・상부 코일 2의 내측이 S가 되고, 하부 코일 2의 내측이 N이 됩니다.
・영구자석은 자기장에 끌려 시계방향으로 90° 회전하여 정지합니다.
스테퍼 모터는 위의 ①부터 ④의 순서로 전자회로에 의해 코일에 흐르는 전류를 전환하여 회전시킬 수 있습니다. 이 예에서는 각 전환 동작으로 인해 스테퍼 모터가 90° 회전합니다.
또한, 코일에 전류가 지속적으로 흐를 때 정지 상태를 유지할 수 있고 스테퍼 모터는 홀딩 토크를 가질 수 있다. 그런데, 코일에 흐르는 전류의 순서를 바꾸면 스테퍼 모터를 반대로 회전시킬 수 있습니다.
전문 산업용 모터 제조업체 찾기 - Dongchun motor China







