 콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 
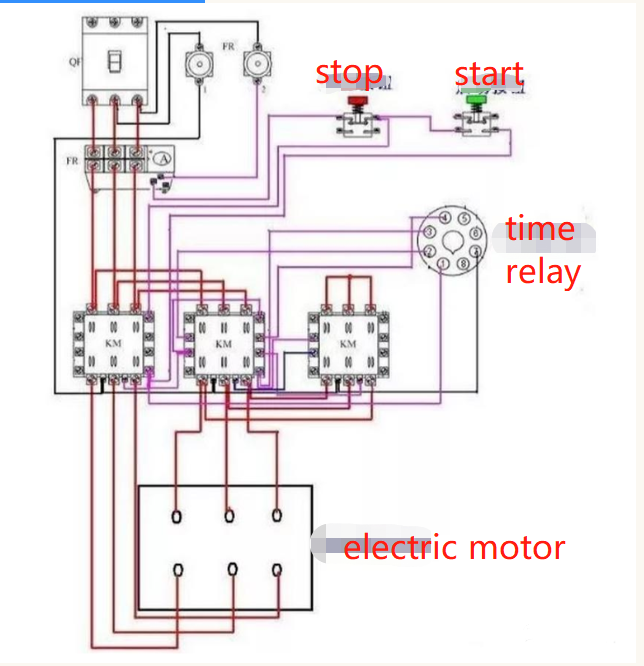
스타-델타 벅 스타트에는 3개의 컨택터, 주 회로 컨택터, 스타 스타트 컨택터 및 트라이앵글 런 컨택터가 필요합니다.
시간 지연을 제어하기 위해 시간 릴레이를 사용하는 것이 가장 좋으며 주 회로 접촉기는 모터를 보호하기 위해 과부하 릴레이로 가열해야 합니다.
스타 델타 강압 스타터는 일반적으로 삼각형 구성으로 작동하는 전기 모터에만 적합합니다.

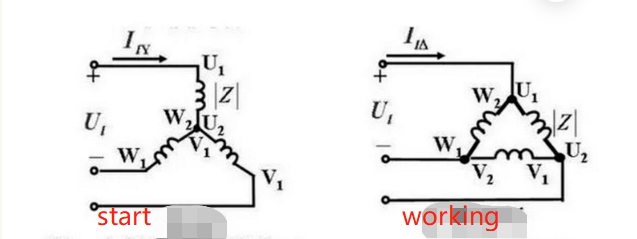
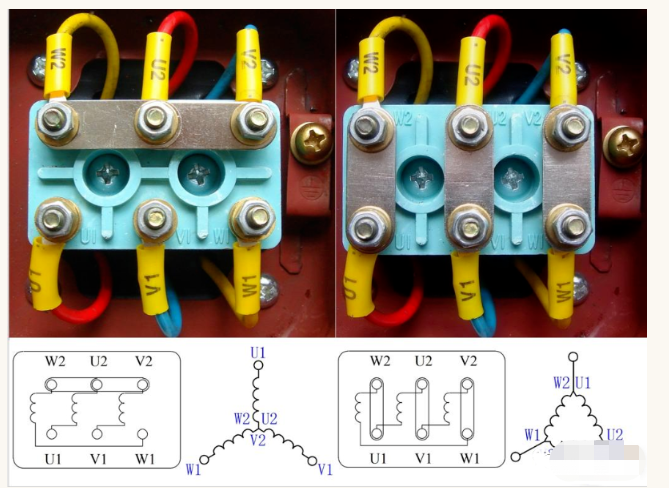
먼저 유도 전동기의 내부 권선을 살펴봅니다.
3상 비동기 모터에는 별 모양과 삼각형 연결이 모두 있는 3개의 내부 모터 권선이 있습니다.
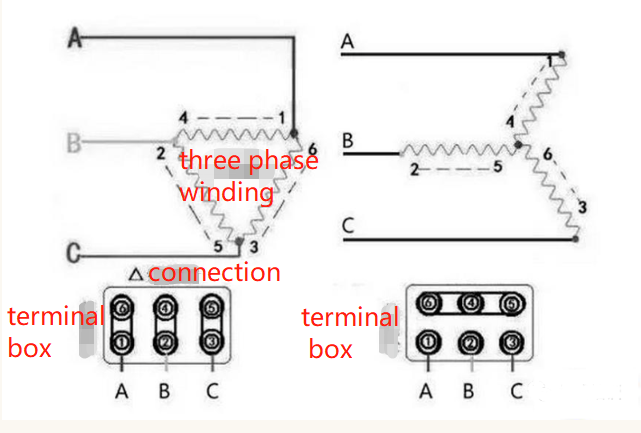
별은 3개의 권선이 끝에 연결되는 곳이고 삼각형은 3개의 권선이 처음과 끝에서 연결되는 곳입니다.
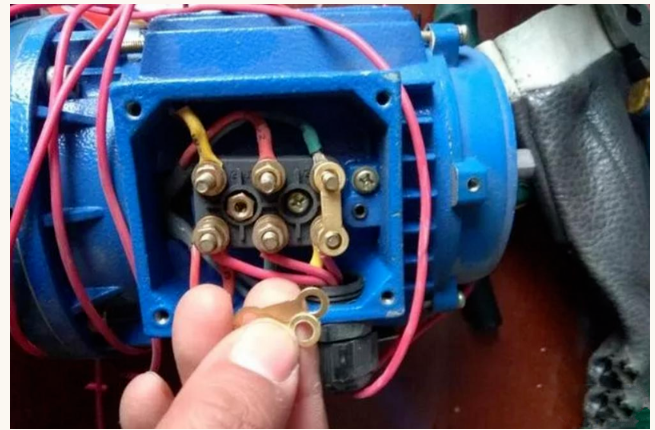
배선할 때 이 세 개의 연결 부품을 제거하십시오.
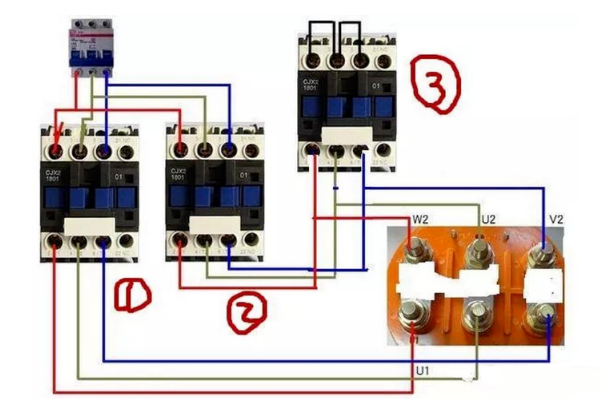
메인 섹션의 배선에 주의하십시오. 노란색, 녹색 및 빨간색 전선을 사용하는 것이 가장 좋습니다.
위의 다이어그램에서 우리는 처음에 No.1 Contactor와 No.3 Contactor가 동시에 함께 빨려 들어가는 것을 알 수 있습니다. 3 개의 접촉기의 상단이 함께 단락되기 때문에 3 점은 한 점으로 연결되며,이 한 점은 모터의 W2, U2, V2에 연결되어 있으며,이 점은 별 연결이라고합니다.
스타 스타트는 전압과 전류를 줄여 유도 전동기가 쉽게 시동됩니다.
시작되면 접촉기 3의 연결이 끊어지고 접촉기 2가 활성화되고 접촉기 1이 주전원 접촉기로 활성화된 상태로 유지됩니다.
1번과 2번 컨택터가 활성화된 후 연결된 모터의 3개 권선이 삼각형 연결이 되고 유도 전동기가 전체 전압에서 정상적으로 작동할 수 있습니다.
여기서 우리는 완전한 배선을 봅니다.
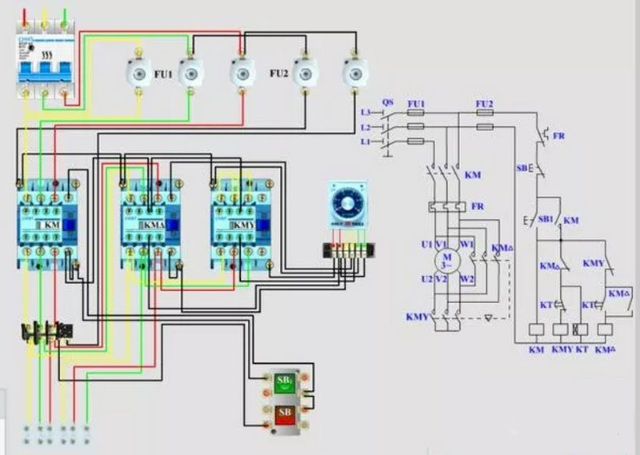
이것이 전체 배선입니다.
열 과부하 계전기는 3상 모두에서 동일한 위상 순서로 주전원 접촉기에 연결됩니다.
위의 노란색, 녹색 및 빨간색 다이어그램은 메인 라인 섹션을 나타내고 검은색 라인은 보조 제어 라인 섹션입니다.
스타 델타 시동을 수행하는 전기 모터에는 두 가지 중요한 특성이 있습니다.
스타 시동 전류와 시동 토크는 모두 정격 전류의 1/3이 됩니다.
열 과부하 계전기는 3상 모두에서 동일한 위상 순서로 주전원 접촉기에 연결됩니다.
위의 그림은 황록색 메인 라인 섹션을 보여주고 검정색 라인은 보조 라인 제어 라인 섹션입니다.
스타-델타 시작 모터에는 두 가지 중요한 특성이 있습니다. 스타 시작 전류와 시작 토크는 모두 정격 전류의 1/3이 됩니다.
시동시 전류가 매우 작다는 것을 알 수 있습니다.
따라서 스타-델타 기동은 모터의 기동 토크가 엄격하게 요구되지는 않지만 기동 전류를 제한해야 하는 애플리케이션에 적합합니다.
시동 시 부하가 너무 무거우면 시동 토크가 정격 토크의 1/3로 떨어져 모터를 운반할 수 없을 수 있으므로 일반적으로 시동 시 부하가 가벼울 때 스타-델타 시동을 사용합니다. 위로 올라가고 무겁습니다. 모터 시동 전류가 너무 높으면 그리드에서 전압 변동이 발생합니다. 이 경우에도 스타-델타 시동을 사용하십시오.
다음 다이어그램에서 시간 릴레이의 배선에 유의하십시오.
따라서 스타-델타 스타터는 모터의 시동 토크가 엄격하게 요구되지는 않지만 시동 전류가 제한되어야 하는 조건에 적합합니다.
따라서 스타-델타 기동을 사용할지 여부를 결정하기 위해 모터 전력의 크기를 일반화할 수 없습니다. 시동 시 부하가 너무 무거우면 시동 토크가 정격 토크의 1/3로 떨어지기 때문에 모터를 운반할 수 없을 수 있으며, 일반적으로 시동 시 부하가 가볍고 주행 시 무거울 때 스타-델타 시동을 사용합니다. . 모터 시동 전류가 너무 높으면 그리드 전압에 변동이 발생합니다. 이 경우에도 스타-델타 시동을 사용하십시오.

매우 간단하게 설명되어 있는 타임 릴레이의 배선에 주의하십시오.
이러한 문제를 명확히 하려면 먼저 몇 가지 기본 전기 이론을 검토해야 합니다.
아래 다이어그램을보고 상이한 연결 방법에서 3 상 부하 회로의 위상 전압과 라인 전압, 위상 전류 및 위상 전류의 관계를 이해하여 시작하겠습니다.
다이어그램에서 중국에서 많이 사용되는 현재 3상 4선식 저전압(TN) 전원 공급 시스템(소위 유틸리티)을 사용하면 부하가 변경되지 않은 상태에서 위상 전압이 추가된다는 것을 알 수 있습니다. 스타 연결이 라인 전압 루트의 1/3일 때 부하의 양쪽 끝에; 각도 연결이 선간 전압과 같을 때 부하의 양단에 추가되는 상 전압.
동일한 하중의 경우, 하중을 통해 흐르는 위상 전류는 별 모드에 연결될 때 라인 전류와 동일하지만, 부하를 통해 흐르는 위상 전류는 각도 모드로 연결될 때 라인 전류의 1/3입니다 (여기서 표현식과 아래 다이어그램의 표현의 차이를 이해하기 위해 조심해야합니다.
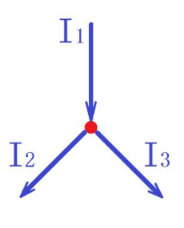
다음으로 Kirchhoff의 노드 현재 법칙을 검토하고 아래 다이어그램을 참조하십시오. 다이어그램에서 우리는 어떤 노드를 통해 흐르는 전류가 항상 해당 노드에서 흐르는 전류와 동일하다는 것을 알고 있습니다.
3 단계 다람쥐 케이지 비동기 모터의 내부 권선의 일반적인 별과 각도 연결을 살펴 보겠습니다. 아래 다이어그램을 참조하십시오.
이것은 자격을 갖춘 전기 기술자가 숙지해야 하는 기본 지식 중 하나인 표준 연결입니다. 그들의 원칙을 이해한 후에 우리는 장비가 생산에 더 나은 서비스를 제공할 수 있도록 향후 생산 실습에서 장비를 유연하게 적용하고 유지할 수 있습니다.
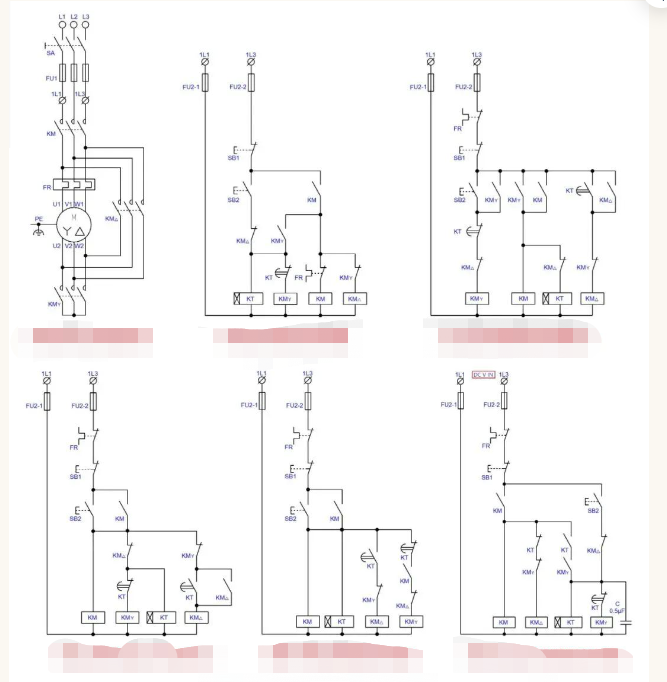
다음 단계는 스타/델타 강압 스타터 회로의 분석을 시작하는 것입니다(아래 다이어그램 참조).
다이어그램 왼쪽의 첫 번째 주 제어 회로는 범용 회로인 표준 스타/델타 벅 시작 주 제어 회로입니다.
왼쪽과 아래쪽에 있는 첫 번째 보조 제어 회로는 전통적인 표준 일반 보조 제어 회로입니다. 두 번째와 세 번째는 현재 사회에서 순환하는 보조 제어 회로 중 하나입니다. 네 번째는 회로를 표준화한 후의 보조 제어 회로입니다. 다섯 번째는 제가 표준화한 보조 제어 회로입니다.
참고: 소위 표준화는 표준 요구 사항에 따라 완전하고 철저하게가 아니라 관련 표준 조항에 따라 다시 그리는 것이므로 작업량이 너무 커서 토론이 필요하지 않습니다. 그것을 이해할 수 있습니다, 이해하십시오.
먼저 표준 Star/Delta 스텝 다운 메인 제어 회로를 살펴 보겠습니다. KMY가 닫힐 때 스타 스텝 다운 시작을 구성합니다. 위상 전압, 라인 전압, 위상 전류, 라인 전류 및 노드 전류 법 사이의 관계에 대한 이론적 논의를 바탕으로, 우리는 KMY (0 또는 중립 지점으로 지칭 될 수 있음)에 의해 형성된 스타 포인트가 와이어에 의해 형성된 스타 지점으로 전류가 흐르고 있으며, 전류가 선이 전류와 동일하다는 것을 알고 있습니다.
삼각 연결의 부하(이 경우 모터의 3상 권선)에서 부하의 각 위상 끝에 적용되는 전압은 선간 전압(즉, 380V)입니다. 즉, 위상 전압은 다음과 같습니다. 라인 전압.
스타 연결로 변경하면(부하 및 입력 전압이 변경되지 않음) 부하의 각 위상 양단의 전압은 원래 전압의 루트의 1/3(즉, 220V)이 되고 각 위상에 흐르는 전류는 부하의 1/3은 원래(각도 연결) 전류의 1/3이며, 이는 전압 감소 시작의 원리입니다.
스타 연결의 위상 전류가 라인 전류와 같기 때문에 이는 KM(주 접촉기)의 주 접점을 통해 흐르는 전류가 KMY(폐쇄형 스타 접촉기)의 주 접점을 통해 흐르는 전류와 동일함을 의미합니다. ). 따라서 동기식 폐쇄 또는 파손 여부에 관계없이 두 개의 접촉기 주 접점에 의해 생성된 아크는 동일하며 아크가 인수의 동기식 폐쇄가 아닌 경우 생성된 아크보다 클 때 두 개의 동기식 폐쇄가 없습니다.
따라서 올바른 선택(선택)과 자격을 갖춘 접촉기를 사용하는 한 정상적인 상황에서 접촉기가 심각한 제거 또는 접착으로 인한 아크로 인해 접촉기가 작동할 때 나타나지 않습니다.
그러나 실제 생산에서 일반적인 설계는 KMY가 KM보다 먼저 닫히는 것입니다. 이것의 목적은 KMY 접점의 서비스 수명을 연장하고 운영 비용을 줄이는 것입니다. 원리는 각 동작 전류에 따라 KM이 선택되고 스타 연결 전류에 따라 KMY가 선택된다는 것입니다. KMY가 KM보다 먼저 닫히면 시작 아크가 발생하지 않으므로(별/각도 스위치가 끊어진 경우는 여전히 있음) 시작 시 아크는 KMY보다 높은 사양의 KM에서 발생합니다. , 사양이 낮은 KMY보다 훨씬 좋습니다.
스타/앵글 스위치에서 KMY의 설계가 먼저 KM을 분리한 다음 KMY를 가장 잘 분리하면(왜냐하면 차단할 때 아크가 닫힐 때보다 훨씬 더 큰 아크이기 때문에), 이로 인해 보조 제어 회로 구조가 복잡해지고 경제적 비용이 증가하며 때로는 더 많은 비용이 발생합니다. 손실 가치보다.
KM△ 각도 연결 접촉기를 다시 보십시오. KM△ 주접점을 통해 흐르는 전류가 상전류일 때의 각도 결선은 선전류의 3분의 1과 같으며 일반적으로 안전하고 신뢰할 수 있도록 선전류에 따라 선택한다.
이는 변환 프로세스 중에 아크가 더 커질 수 있고 접촉기 접점을 쉽게 태울 수 있기 때문입니다. 물론 KM△이 KM보다 먼저 닫히면 상전류(선전류의 근수의 1/3)에 따라 KM△를 선택할 수 있다.
그러나 이것은 제어 회로 구조를 복잡하게 만들고, 장비 제조 비용이 낮아지지 않았을 뿐만 아니라 이익보다 손실이 더 많을 정도로 좋지 않습니다.
스타/델타 벅 시작 요약의 주 회로 분석: 정상적인 상황에서 접촉기 사양 및 자격 있는 제품 유형의 올바른 선택이 문제가 되지 않는 한 KM 및 KMY 동기 동작은 원인 arcing은 오해입니다.
실제로 아크가 발생하는 이유는 여러 가지가 있지만 가장 큰 이유는 별/각 변환 시간이 제대로 설정되지 않았거나 부하가 너무 무겁기 때문입니다.
시작 시간은 너무 일찍 변환하기에 충분하지 않습니다. 일부는 모터 자체의 품질이거나 일반적인 유지 보수가 충분하지 않아 실행 전류가 커집니다. 일부는 질병 또는 불합리한 설계로 모터가 작동하여 모터의 장기간 과부하 작동을 초래합니다. 물론 설계를 배제하지 않거나 유지 보수 프로세스에 사용되는 접촉기의 유형, 사양 및 품질이 요구 사항을 충족하지 않습니다. .
또한 스타/델타 전압 감소 시작에는 특정 적용 범위가 있으며 다른 전압 감소 시작 방법보다 반드시 더 나은 것은 아닙니다. 스타/델타 전압 감소의 시작 전류가 전체 전압 시작 전류의 1/3이기 때문에 시작 토크는 원래 시작 토크의 1/3에 불과하며 이는 경부하 또는 무부하 시작 장비(예: 스타/델타 전압 감소 스타터 모터를 시동하기 전에 펌프 또는 공기 압축기가 입구/출구 밸브를 닫거나 압축 공기 탱크를 비워야 하기 때문입니다.
과부하 시동 장비의 경우 시동 시간이 30초 이상(특히 1분 이상)이면 모터와 공급 라인에 상당한 영향을 미칩니다(특히 공급 변압기의 용량이 부족한 경우).
따라서 모터의 부하가 무거울수록(또는 전력이 높을수록) 다른 기동 방법[예: 자동 전환 벅 스타트, 확장 측면 삼각형 벅 스타트, 고정자 직렬 리액터(또는 저항) 벅 스타트, 소프트 스타터 벅 스타트, 주파수 변환기 인버터 스타트 등]을 사용하여 특정 실제 상황에 따라 시동 방법을 선택해야 합니다.
따라서 스타/델타 벅 시동이 다른 벅 시동 방법보다 훨씬 낫다고 생각하는 것은 잘못된 생각입니다.
어떤 장비를 사용하든 벅 스타팅만 사용한다면 모든 스타/델타 벅 스타팅 방법을 사용한다고 생각하는 것도 실수입니다(스타/델타 벅 스타팅의 장점은 구조가 간단하고 크기가 작다는 것입니다).
다음은 스타/델타 벅 시동을 위한 보조 제어 회로에 대한 설명입니다.
제어 회로라고 하는 보조 제어 회로는 프로세스 요구 사항에 따라 제어 대상을 제어하는 회로입니다. 위의 5가지 제어 방법 중 회로 구성만 다른 네 번째, 앞의 세 가지와 반대인 네 번째, 각도 전환 접촉기 지연 기능이 추가된 것 외에는 제어 방법이 거의 동일합니다. 처음 세 개의 제어 회로에.
첫 번째 제어 회로는 기존의 표준 제어 회로로, 메인 접촉기(KM)가 닫히기 전에 첫 번째 밀폐형 스타(KMY)로 벅 스타트를 메인 회로에 공급하고 시작이 완료된 후에는 각도 작동으로 전환되고 시간 릴레이가 작동을 종료합니다.
이 회로는 회로 구조가 단순하면서도 안전하고 안정적인 작동 특성을 충족합니다.
두 번째 및 세 번째 제어 회로는 강압 시작을 제공하기 전에 스타를 먼저 밀봉하고 시작이 완료된 후 시간 릴레이가 종료된다는 점에서 첫 번째 제어 회로와 유사합니다.
차이점은 회로 구조가 조금 더 복잡하고 일부 이중 체인 접점이 추가되어 첫 번째 제어 회로보다 안전성과 신뢰성이 더 높다는 것입니다.
특히 두 번째 제어 회로인 접점을 가장 많이 사용했는데, 안전성과 신뢰성이 많이 높아졌지만 유지 관리가 훨씬 더 어려웠습니다.
네 번째는 설계된 회로입니다. 이 회로의 경우 개인적으로 매우 합리적이고 완벽하지 않다고 생각합니다.
이중 체인 기능이 추가되었지만 메인 접촉기 KM은 실링 스타 컨택터 KMY 전에 닫히고 실링 스타 컨택터 KMY는 종종 아크 상태에서 작동하는데, 이는 스타를 먼저 실링한 다음 벅 스타트에 전원을 공급하는 것보다 항상 더 좋습니다.
무해하지만 접촉기 KMY 접점이 항상 첫 번째 씰 스타 접점 수명보다 훨씬 짧도록 씰 스타 이후의 첫 번째 씰 스타와 비교할 때 아크 라이트 작업의 두 배 이상입니다.
작동 중인 타임 릴레이 KT의 장기적인 개입은 이 회로의 어려운 부분입니다.
아시다시피 지속적으로 전원이 공급되고 작동에 관여하는 구성 요소의 수명은 그렇지 않은 경우보다 훨씬 짧고 전력 소비가 증가합니다.
As the saying goes, "more incense burners, more ghosts", your time relay KT is involved in long-term operation, so it may give you a failure in operation at some point, affecting the efficiency of the equipment and increasing operating and maintenance costs.
다섯째는 제공되는 회로이다.
동작 및 이전 3 개 유사한 작동에서는 전원 및 시간 릴레이 후 첫 번째 밀봉 된 별이 함수의 작동에 관여하지 않지만 평행 커패시터 C를 사용하여 각도 컨택 터 km 클로저를 연장하는 것은 약간의 뱀 - 중복입니다.
그리고 지연 기능은 DC 공급 제어 회로에서만 역할을 하지만 AC 회로에서는 역할을 하지 않거나 심지어 중복되고 번거로운 것입니다.
당신은 당신에게 결함으로 인한 고장 또는 누출을 언제 줄지 모릅니다.
DC 회로에서 인덕터의 역피크 전압은 정격 전압의 4~5배입니다.
글쎄, 그것은 스타/델타 벅 시작 회로의 분석을위한 것입니다.
정보가 필요하면 댓글 영역에 메시지를 남겨주세요.
전기 모터에 대한 문의 사항은 전문 전기 모터에 문의하십시오. 제조사 ~에 중국 다음과 같이:

동춘모터는 운송, 인프라, 건설 등 다양한 산업군에서 사용되는 다양한 전동기를 보유하고 있습니다.
신속한 답변을 받으세요.






