 コンテンツにスキップします
コンテンツにスキップします 
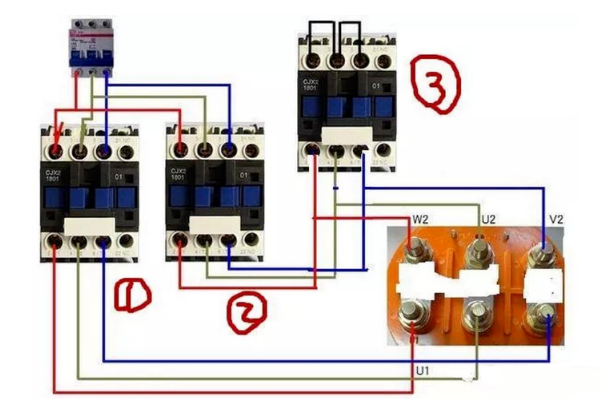
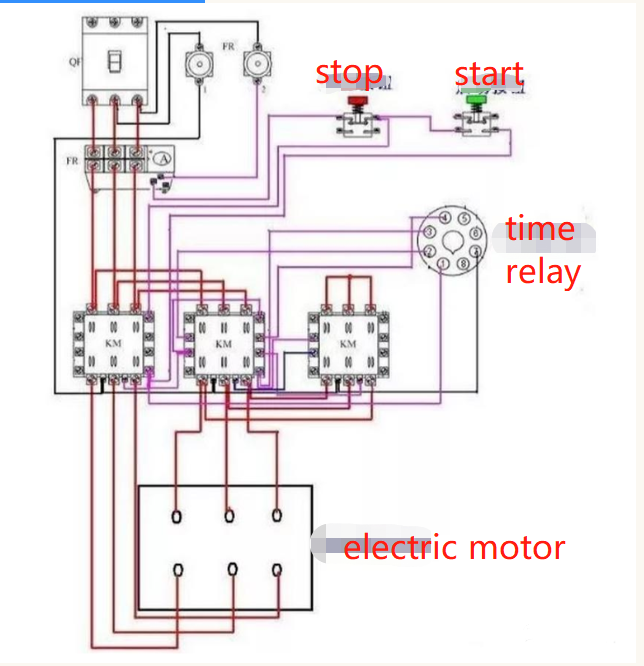
Star-Delta Buck Startには、3つのコンタクタ、メイン回路コンタクタ、スタースタートコンタクタ、トライアングルランコンタクタが必要です。
タイムリレーを使用して時間遅延を制御することをお勧めします。また、メイン回路接触器は、モーターを保護するために過負荷リレーで加熱する必要があります。
Star-Deltaのステップダウンスターターは、通常、三角形の構成で実行される電動モーターにのみ適しています。

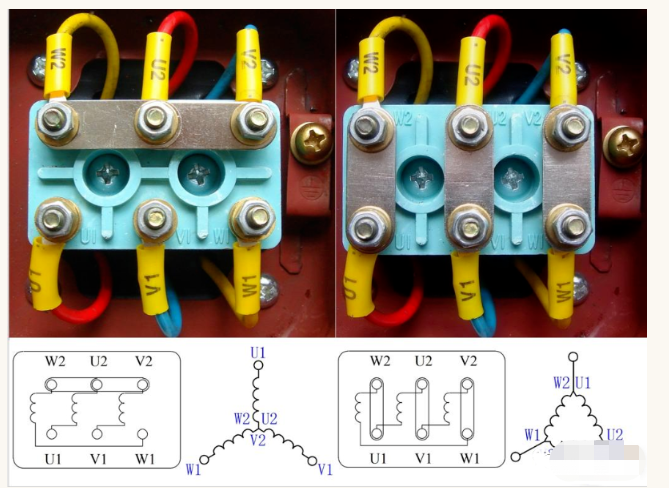
最初に、誘導モーターの内部巻線を見ます。
星と三角形の両方の接続を備えた3相非同期モーターには、3つの内部モーター巻線があります。
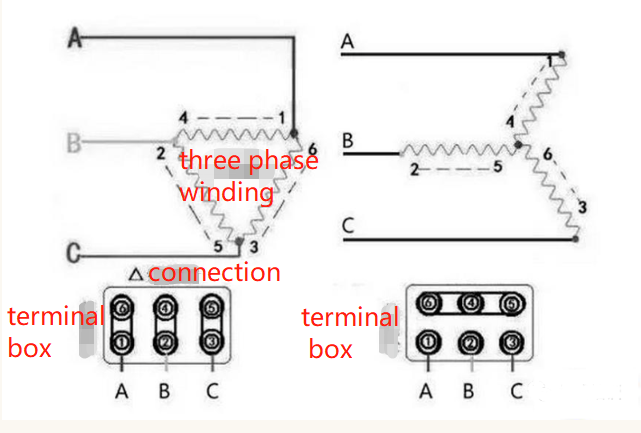
星は、3つの巻線が最後に結合される場所です。三角形は、3つの巻線が最初と端に結合される場所です。
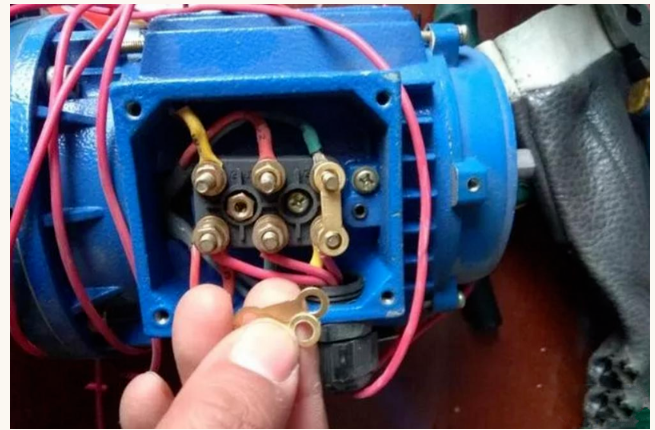
配線時にこれらの3つの接続ピースを削除します。
メインセクションの配線に注意してください。黄色、緑、赤のワイヤを使用することをお勧めします。
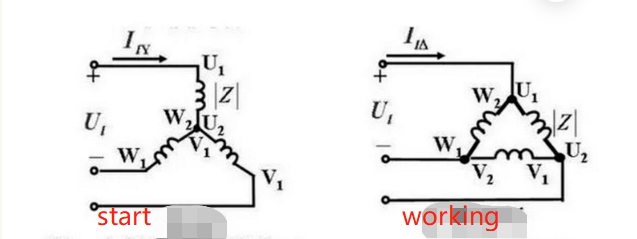
上記の図から、3つのコンタクタの上端が一緒に短絡し、3つのポイントが1つのポイントとして接続されているため、最初はNo.1コンタクタとNo.3コンタクタが同時に吸い込まれ、この1つのポイントがモーターのW2、U2、V2に接続されています。
スタースタートは電圧と電流を減らすため、誘導モーターは簡単に起動します。
開始すると、コンタクタ3が切断され、コンタクタ2がアクティブ化され、コンタクタ1が主電源コンタクタであり、アクティブ化されたままです。
No. 1およびNo. 2のコンタクタが活性化された後、モーター接続の3つの巻線が三角形の接続になり、誘導モーターは正常に完全な電圧で動作できます。
ここでは、完全な配線が表示されます。
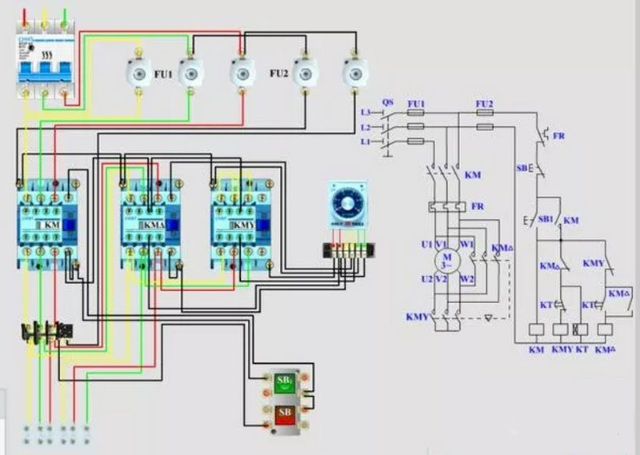
これは完全な配線です。
熱過負荷リレーは、3つのフェーズすべてで同じ位相シーケンスで主電源コンタクタに接続されています。
上の黄色、緑、赤の図は、メインラインセクションを示し、黒い線は二次制御線セクションです。
Star-Deltaを開始する電動モーターには、2つの重要な特性があります。
星の開始電流と開始トルクは両方とも、定格電流の3分の1になります。
熱過負荷リレーは、3つのフェーズすべてで同じ位相シーケンスで主電源コンタクタに接続されています。
上記の図は、黄緑色の赤いメインラインセクションを示し、黒い線はセカンダリライン制御ラインセクションです。
Star-Deltaスタートを備えたモーターには2つの重要な特性があります。スタースタート電流とスタートトルクは、両方とも定格電流の3分の1になります。
起動時の電流は非常に小さいことがわかります。
したがって、Star-Deltaの開始は、モーターの開始トルクが厳密に必要ではなく、開始電流が制限される必要があるアプリケーションに適しています。
起動時に負荷が重すぎる場合、開始トルクが定格トルクの3分の1に低下するため、モーターを運ぶことができない可能性があるため、一般に、スターアップ時に荷重が軽く、ランナップ時に重いときにスターデルタのスタートが使用されます。モーターの開始電流が高すぎる場合、グリッドの電圧変動を引き起こします。この場合、Star-Deltaの開始も使用します。
次の図のタイムリレーの配線に注意してください。
したがって、Star-Deltaスターターは、モーターの開始トルクが厳密に必要ではないが、開始電流を制限する条件に適しています。
したがって、モーターパワーのサイズを一般化して、Star-Deltaの開始を使用するかどうかを判断することはできません。開始時に負荷が重すぎる場合、開始トルクが定格トルクの3分の1に低下し、通常はスターデルタの起動が使用され、荷重が開始時に軽く、実行時に重いため、モーターを運ぶことができない場合があります。モーターの開始電流が高すぎる場合、グリッド電圧の変動を引き起こします。この場合、Star-Deltaの開始も使用します。

タイムリレーの配線に注意してください。これは非常に簡単に説明されています。
これらの問題を明確にするには、まずいくつかの基本的な電気理論をレビューする必要があります。
以下の図を見てください。さまざまな接続方法での3相荷重回路の位相電圧とライン電圧、位相電流と位相電流の関係を理解することから始めましょう。
図から、中国で大量に使用される現在の3相の4線式低電圧(TN)電源システム(いわゆるユーティリティ)を採取すると、負荷が変化しないままになると、星接続がライン電圧のルートの3分の1があるときに荷重の両端に追加される位相電圧が採取されることを知っています。角度接続がライン電圧に等しい場合、荷重の両端に追加される位相電圧。
同じ負荷の場合、荷重を流れる位相電流は星モードで接続されているときにライン電流に等しく、荷重を流れる位相電流は角度モードで接続された場合、線電流のルートの3分の1です(以下の図の式の式の違いを理解するように注意してください。
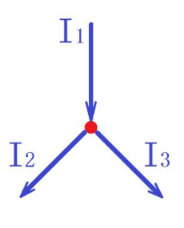
次に、KirchhoffのNodal Current Lawを確認しましょう。以下の図を参照してください。図から、任意のノードを流れる電流は常にそのノードから流れる電流に一定であることがわかります[各分岐回路の電流の代数(ACはベクトル合計)はゼロに等しいと言えます)。つまり、ノードに電流が蓄積しません
3相リスケージの非同期モーターの内部巻線の一般的な星と角度のつながりを見てみましょう。下の図を参照してください。
これは標準的な接続であり、資格のある電気技師が習得しなければならない基本的な知識の1つです。彼らの原則を理解した後、私たちは将来の生産慣行に機器を柔軟に適用して維持することができ、機器が生産をより良く提供できるようにすることができます。
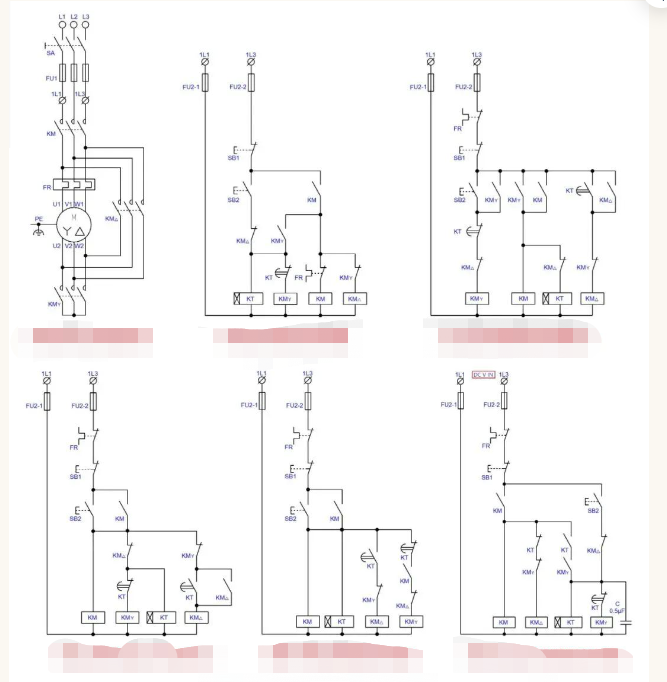
次のステップは、Star/Deltaのステップダウンスターター回路の分析を開始することです。以下の図を参照してください。
図の左側にある最初のメインコントロール回路は、標準の星/デルタバックスタートメインコントロール回路であり、これは汎用回路です。
左側と下側の最初の補助制御回路は、従来の標準汎用補助制御回路です。 2番目と3番目は、現在社会で流通している補助制御回路の1つです。 4番目は、回路を標準化した後の補助制御回路です。そして、5番目は、私が標準化した後の補助制御回路です。
注:いわゆる標準化は、関連する標準条項に従って、標準的な要件に従って完全かつ完全に徹底的ではなく、ワークロードが大きすぎるように再描画することであり、誰もが理解できる限り、議論は必要ありません。
まず、KMYが閉じたときに星のステップダウン開始を構成する標準的な星/デルタステップダウンメインコントロール回路を見てみましょう。位相電圧、ライン電圧、位相電流、線電流、および節点電流法の関係の理論的議論に基づいて、KMYによって形成された星点(ゼロまたはニュートラルポイントと呼ばれる可能性がある)は、KMYの主要な接触を通る電流を流れる電流がワイヤーによって形成された星ポイントに等しくなります。
三角形接続の負荷(この場合はモーターの3相巻線)として、荷重の各位相の端に印加される電圧は、ライン電圧(つまり380V)、つまり、位相電圧はライン電圧に等しくなります。
星接続(負荷と入力電圧が変化しないまま)に変更すると、負荷の各フェーズの両端の電圧は元の電圧(つまり220V)のルートの3分の1になり、荷重の各位相を通過する電流は元の(角度接続)電流の1/3のみです。
星接続の位相電流はライン電流に等しいため、これは、km(メインコンタクタ)のメイン接点を通る電流がKMY(閉じた星接触器)のメインコンタクトを通る電流と同じであることを意味します。したがって、同期的に閉じているか壊れているかにかかわらず、2つのコンタクタメインコンタクトによって生成されるアークは同じです。引数の同期閉鎖がない場合、アークが生成されるアークよりも大きい場合、2つの同期閉鎖はありません。
したがって、正しい選択(選択)と資格のあるコンタクタの使用が、通常の状況下では、接触の深刻なアブレーションまたは可能性の接着によって引き起こされるアークのためにコンタクタの作用が発生したときには現れません。
ただし、生産慣行では、通常の設計では、KMYがkmの前に閉鎖されることです。これの目的は、KMY連絡先のサービス寿命を延長し、運用コストを削減することです。原則は、kmが角の動作電流に従って選択され、KMYは星接続電流に従って選択されることです。 kmがkmの前に閉じた場合、起動アークはありません(星/角度スイッチが壊れているときもまだあります)。そのため、起動時のアークは、KMYよりも高い仕様でkmが下します。
Star/AngleスイッチでのKMYの設計が最初にKMを切断し、次にKMY Best(ARCがはるかに大きなARCよりも壊れるとき)を切断しますが、これにより、補助制御回路構造の複雑さと経済コストが増加します。
KM角接続コンタクタをもう一度見てください。 kmの角度を流れる電流が、主な接触が位相電流であり、一般的に言えば、安全で信頼性を持つために、線電流に従って選択されます。
これは、コンバージョンプロセス中にアークが大きくなり、コンタクタの接点を簡単に燃やす可能性があるためです。もちろん、kmがkmの前に閉じられている場合、kmは位相電流(線電流のルート番号の3分の1)に従って選択できます。
しかし、これにより制御回路構造が複雑になり、機器の製造コストが下がらなかっただけでなく、利益よりも多くの損失をもたらすほど十分ではありません。
星/デルタバックの主たる回路の分析は概要を開始します。コンタクタの仕様と適格製品のタイプの正しい選択が、通常の状況では接触装置の接触アブレーションは問題ではない限り、KMとKMYの同期アクションが誤解を招くことです。
実際には、アークには多くの理由がありますが、主な理由は、星/角度変換時間が適切に設定されていないか、負荷が重すぎることです。
開始時間は、早すぎるほど変換するには十分ではありません。モーター自体の品質があるものもあれば、通常のメンテナンスでは不十分で、実行電流が大きくなります。一部は、疾患または不合理な設計で走るモーターであり、もちろん、メンテナンスプロセスで使用されるコンタクタの設計やタイプ、仕様、品質を除外しないモーターの長期的な過負荷操作をもたらします。
さらに、Star/Deltaの電圧削減は、特定の範囲のアプリケーションを備えており、必ずしも他の電圧削減の開始方法よりも優れているわけではないことに注意してください。星/デルタ電圧削減の開始電流は完全な電圧開始電流の1/3であるため、開始トルクは元の開始トルクの1/3にすぎません。これは、光または無負荷の開始装置にのみ適用できます(ポンプやエアコンプレッサーなどの機器はインレット/アウトレットバルブを閉じるか、星/デルタの電圧回復星モーターを起動する前に圧縮されたエアタンクを空にする必要があります)。
重度のロードされた開始機器の場合、30秒以上(特に1分を超える)の開始時間は、モーターと供給ラインに大きな影響を与えます(特に供給トランスが容量にさらされている場合)。
したがって、荷重(または電力が高い)が重いほど、他の開始方法[例えばAutoTRANSFER BUCK START、拡張サイドトライアングルバックスタート、ステーターシリーズリアクター(または抵抗)バックスタート、ソフトスターターバックスタート、周波数コンバーターインバータースタートなど]を使用して、特定の実際の状況に応じて開始方法を選択する必要があります。
したがって、Star/Delta Buckの開始は、他のバック開始方法よりもはるかに優れていると考えるのは誤解です。
また、どの機器が使用されていても、バックスタートが使用されている限り、すべての星/デルタバックの開始方法が使用されると考えるのは間違いです(Star/Delta Buckの利点は、その単純な構造と小さなサイズです)。
以下は、Star/Delta Buckの開始の補助制御回路の議論です。
制御回路と呼ばれる補助制御回路は、プロセス要件に従って制御されるオブジェクトを制御する回路です。上記の5つの制御方法のうち、制御方法は4番目を除いてほぼ同じです。これは回路構造が異なり、4番目は最初の3つの反対であり、最後は最初の3つのコントロール回路に角度切り替えコンタクター遅延関数を追加します。
最初の制御回路は、メインコンタクタ(km)が閉じる前に最初の密閉星(KMY)である従来の標準制御回路です。メインサーキットにバックスタートを供給し、スタートの後、完全に角度操作に変わり、タイムリレーは操作を終了します。
この回路には単純な回路構造がありますが、安全で信頼できる操作の特性を満たしています。
2番目と3番目のコントロール回路は、ステップダウン開始を供給する前に最初に星を密封するという点で、最初の制御回路に似ています。
違いは、回路構造がもう少し複雑であり、最初の制御回路よりも安全性と信頼性が高い二重チェーン接点を追加することです。
特に、2番目の制御回路では、連絡先が最も使用しましたが、安全性と信頼性は大幅に増加しましたが、維持するのははるかに困難です。
4番目は設計された回路です。この回路については、個人的にはそれはあまり合理的で完璧ではないと思います。
ダブルチェーン機能が追加されますが、メインコンタクタKMはシーリングスターコンタクタKMYの前に閉じ、シーリングスターコンタクタKMYはしばしばアークの下で動作します。
無害ですが、最初のシールスターと比較して、シールスターの後にコンタクターKMYの接点が最初のシールスターの接触寿命よりもはるかに短くなります(アークライトでの2倍以上の作業)。
操作中のタイムリレーKTの長期的な関与は、この回路の難しい部分です。
私たちが知っているように、絶えず活性化され、動作に関与しているコンポーネントの寿命は、そうでない場合よりもはるかに短く、消費電力が増加します。
As the saying goes, "more incense burners, more ghosts", your time relay KT is involved in long-term operation, so it may give you a failure in operation at some point, affecting the efficiency of the equipment and increasing operating and maintenance costs.
5番目は提供される回路です。
作用と以前の3つの類似の動作中に、パワーとタイムリレーの後の最初の密閉星は関数の動作に関与していませんが、角度コンタクタkmの閉鎖を拡張するための並列コンデンサCの使用は、少し冗長です。
また、DC供給制御回路でのみ遅延機能は、AC回路で役割を果たしますが、役割も冗長で面倒なこともありません。
障害によって引き起こされる故障や漏れをいつ与えるかわからない。
DC回路のインダクタの逆ピーク電圧は、定格電圧の4〜5倍高いことに注意してください。
まあ、それは星/デルタ・バックの始動回路の分析のためのことです。
コメント領域に情報を残してください。
電気モーターに関するお問い合わせは、プロの電気モーターにお問い合わせください メーカー で 中国 次のように:

Dongchun Motorには、輸送、インフラストラクチャ、建設など、さまざまな業界で使用される幅広い電気モーターがあります。
迅速な返信を取得します。






