 Lewati ke konten
Lewati ke konten Apa perbedaan antara motor tanpa sikat dan motor yang disikat?
Apa perbedaan antara motor sinkron dan motor asinkron?
Bagaimana dengan motor induksi rotor lilitan?
Apakah semua motor servo motor AC?
Apakah semua motor servo motor sinkron?
Apakah motor stepper milik motor DC atau motor AC?
Apakah motor servo motor servo? ......
Orang bijak pernah berkata: Jika pengetahuan tidak sistematis, apa bedanya dengan paragraf?
Tapi buku bijak tentang teks yang bertele-tele itu, terminologi yang aneh itu, penjelasan yang masuk akal itu, benar-benar memandang orang-orang di awan.
Saya juga sudah lama mencari di Internet, tidak menemukan penjelasan yang lebih sistematis tentang struktur motor listrik dan prinsip klasifikasi, jadi mereka berusaha keras untuk menanyakan dan mengatur salinannya.
Artikel ini mencoba menjelaskan pengetahuan sistematis dalam bahasa sederhana, dan menggunakan banyak animasi dan gambar untuk mengungkapkan pengetahuan yang tidak jelas dengan jelas.
Dikarenakan keterbatasan pengetahuan saya, maka tidak dapat dipungkiri masih banyak kesalahan, mohon dikoreksi para ahlinya, mohon jangan sungkan untuk memberikan saran.
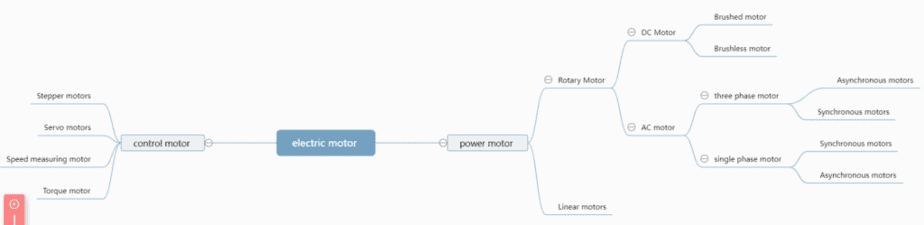
1. diagram untuk menjelaskan jenis-jenis dasar motor listrik
2. DC Electric Motor - Motor Sikat
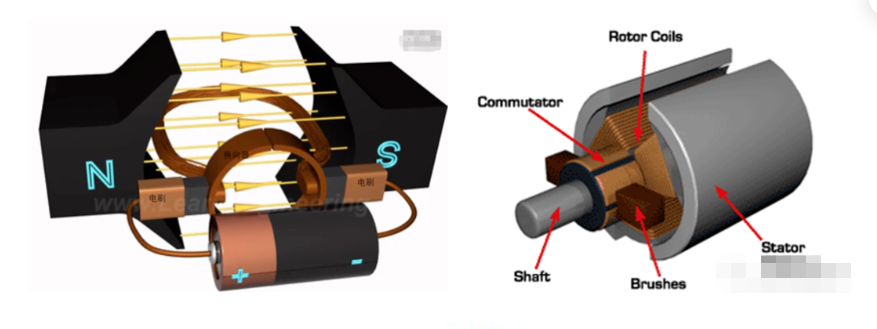
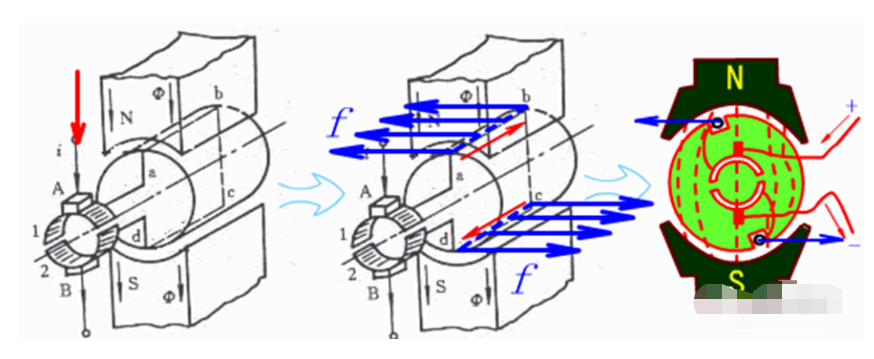
Baca fisika sekolah menengah dari bajingan pengganggu, untuk mempelajari konduktor berenergi dalam gaya medan magnet benda itu, kami telah melatih tangan kiri menjadi telapak tangan yang patah, yang persis merupakan prinsip motor induksi DC.
Semua motor listrik terdiri dari stator dan rotor, pada motor listrik DC, untuk membuat rotor berputar, Anda harus terus-menerus mengubah arah arus, jika tidak, rotor hanya dapat berputar setengah putaran, ini seperti pedal sepeda .
Itu sebabnya DC Motors membutuhkan komutator.
Secara garis besar, motor DC brushed meliputi motor brushed dan motor brushless.
Motor sikat juga disebut motor induksi DC atau motor sikat karbon, sering disebut motor DC sikat.
Ini menggunakan pergantian mekanis, kutub eksternal tidak menggerakkan kumparan internal (angker) bergerak, komutator dan kumparan rotor berputar bersama, sikat dan magnet tidak bergerak, sehingga gesekan gesekan komutator dan sikat, menyelesaikan peralihan arah arus.
Kelemahan motor sikat.
1, pergantian mekanis percikan api yang dihasilkan oleh komutator dan gesekan sikat, interferensi elektromagnetik, kebisingan tinggi, umur pendek.
2, keandalan yang buruk, banyak kegagalan, membutuhkan perawatan yang sering.
3, karena adanya komutator, membatasi inersia rotor, membatasi kecepatan maksimum, mempengaruhi kinerja dinamis.
Karena memiliki begitu banyak kekurangan mengapa masih umum digunakan, karena torsi tinggi, struktur sederhana, perawatan mudah (yaitu mengganti sikat karbon), murah.
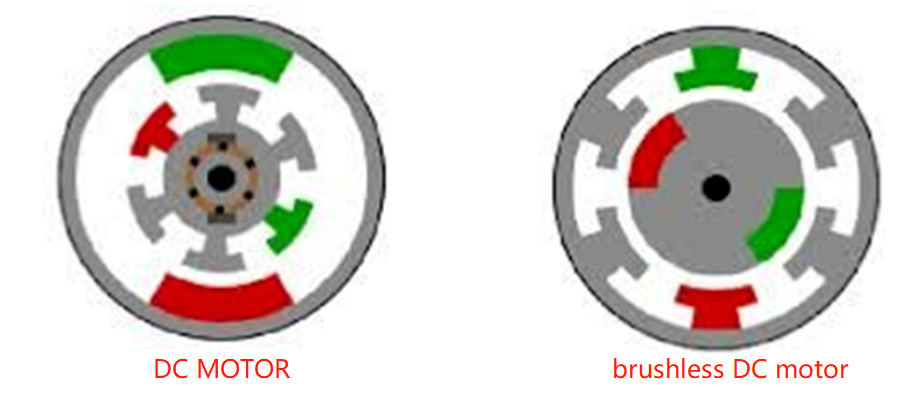
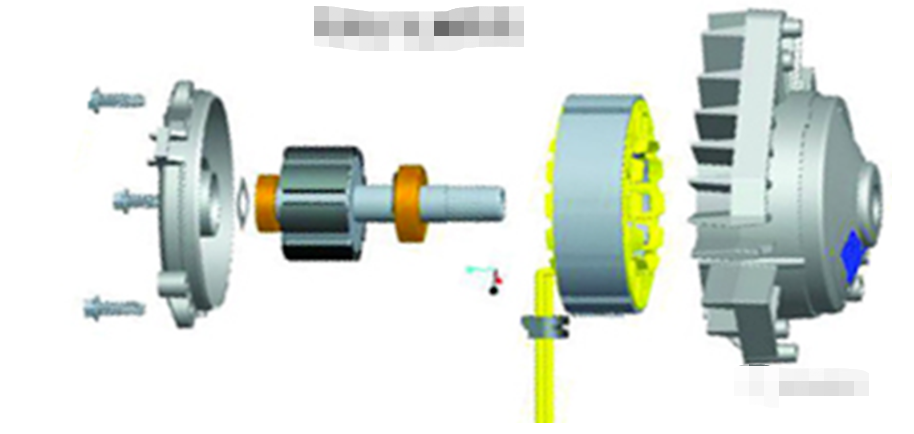
2. DC Motors - Brushless Motors
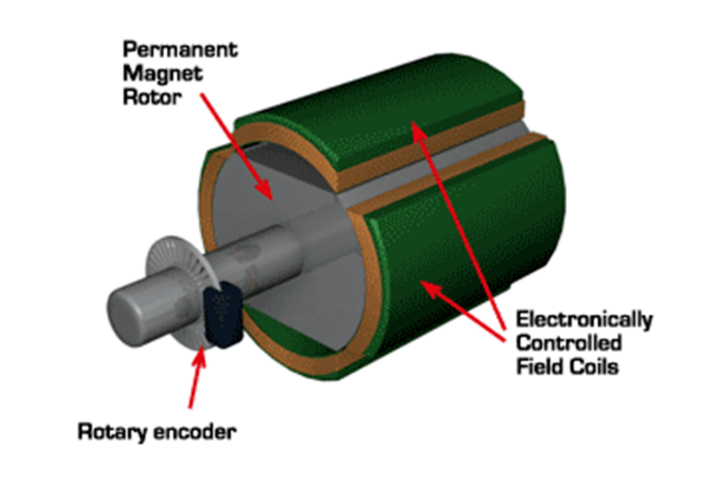
Motor brushless disebut juga DC inverter motor (BLDC) di beberapa bidang, menggunakan pergantian elektronik (sensor Hall), kumparan (armature) tidak bergerak, kutub magnet bergerak, maka magnet permanen bisa berada di luar kumparan atau di dalam kumparan. , jadi ada motor brushless rotor eksternal dan motor brushless rotor internal
Motor tanpa sikat dibangun dengan cara yang sama seperti motor sinkron magnet permanen.
Namun, motor tanpa sikat tunggal bukanlah sistem tenaga yang lengkap. Tanpa sikat pada dasarnya harus dikendalikan oleh pengontrol tanpa sikat, juga dikenal sebagai ESC, untuk mencapai operasi yang berkelanjutan.
Itu adalah brushless electronic governor (ESC) yang sangat menentukan kinerjanya.
Secara umum, ada dua jenis arus penggerak untuk motor brushless, satu adalah gelombang persegi dan yang lainnya adalah gelombang sinus.
Kadang-kadang yang pertama disebut motor DC brushless, dan yang terakhir disebut motor servo AC, yang merupakan jenis motor servo AC.
Motor brushless beroperasi dengan cara yang berbeda, dan dapat dibagi menjadi motor brushless rotor dalam dan motor brushless rotor luar.
Rotor bagian dalam adalah tiga fase, yang lebih mahal.
Rotor luar biasanya digunakan dalam fase tunggal, harga rakyat, produksi massal mendekati motor sikat karbon, sehingga dalam beberapa tahun terakhir banyak digunakan.
Harga tiga fase rotor luar mendekati harga rotor dalam.
Nah, seperti yang bisa Anda tebak, kekurangan motor sikat adalah kelebihan motor tanpa sikat.
Ini memiliki efisiensi tinggi, konsumsi energi rendah, kebisingan rendah, umur panjang, keandalan tinggi, kontrol servo, kecepatan konversi frekuensi stepless (hingga kecepatan sangat tinggi) dan keunggulan lainnya.
Ini relatif lebih kecil dari motor DC sikat, kontrol daripada motor AC asinkron sederhana, torsi awal adalah kapasitas kelebihan beban yang besar, seperti kerugian ...... lebih mahal daripada sikat, perawatan yang buruk.
2. DC Motor - Prinsip Kontrol Kecepatan
Pengaturan kecepatan motor induksi DC: yang disebut pengaturan kecepatan, yaitu dengan mengatur kecepatan motor untuk mendapatkan torsi yang dibutuhkan.
motor dc magnet permanen dengan menyesuaikan tegangan, resistansi seri, mengubah eksitasi dapat menjadi kecepatan, tetapi penyesuaian tegangan sebenarnya adalah yang paling nyaman dan paling umum digunakan, penggunaan utama pengaturan kecepatan PWM.
PWM sebenarnya melalui saklar berkecepatan tinggi untuk mencapai pengaturan tegangan DC, siklus, buka lama, tegangan rata-rata tinggi, mati lama, tegangan rata-rata rendah, sangat nyaman untuk menyesuaikan, selama sakelar kecepatan Selama kecepatan switching cukup cepat, harmonik grid kurang, dan arus lebih kontinyu.
Namun, sikat dan komutator aus untuk waktu yang lama, dan pada saat yang sama terjadi perubahan arus yang sangat besar selama pergantian, yang sangat mudah menghasilkan percikan api.
Komutator dan sikat membatasi kapasitas dan kecepatan motor induksi DC, yang membuat pengaturan kecepatan motor induksi DC menemui hambatan.
Untuk motor induksi DC brushless, kontrol kecepatan hanya mengontrol tegangan input di permukaan.
Tetapi sistem kontrol frekuensi pengendalian diri motor (motor DC tanpa sikat itu sendiri dilengkapi dengan detektor posisi rotor dan perangkat akuisisi sinyal posisi rotor lainnya, menggunakan sinyal posisi rotor dari perangkat ini untuk mengontrol momen perubahan fase perangkat kontrol frekuensi tegangan variabel) secara otomatis mengontrol frekuensi sesuai dengan variabel tegangan, yang hampir sama dengan motor DC (sofed), sangat). Sangat nyaman.
Karena rotor menggunakan magnet permanen, tidak ada belitan eksitasi khusus, dalam hal kapasitas yang sama, motor lebih kecil, lebih ringan, lebih efisien, lebih kompak, operasi lebih andal, kinerja dinamis lebih baik, dalam penggerak kendaraan listrik dan aspek lainnya telah banyak digunakan.
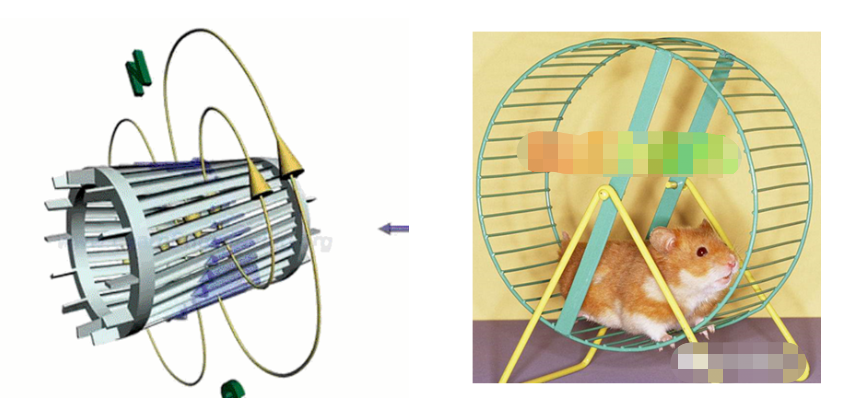
3. Motor AC tiga fase - motor asinkron
Motor AC dibagi menjadi motor sinkron dan motor asinkron, motor sinkron banyak digunakan pada generator dan motor asinkron banyak digunakan pada motor listrik. Mereka adalah motor induksi sangkar tupai.
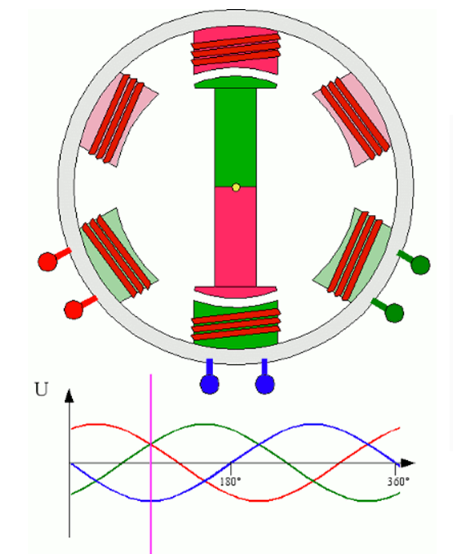
Rumah motor adalah stator, dan ada tiga belitan AC simetris pada stator.
Ketika urutan dari tiga fase berubah, medan magnet sintetik berputar terbentuk, dan kecepatan rotasi medan magnet adalah kecepatan sinkron.
Kecepatan sinkron n=60f/p, f adalah frekuensi, p adalah jumlah pasangan kutub, misalnya untuk motor 2 kutub yang terhubung ke jaringan nasional 50Hz (yaitu jumlah pasangan kutub adalah 1 pasang), maka kecepatan n=60*50/1=3000r/min.
Demikian pula, kecepatan sinkron motor 4 kutub, 6 kutub dan 8 kutub adalah 1500, 1000 dan 750.
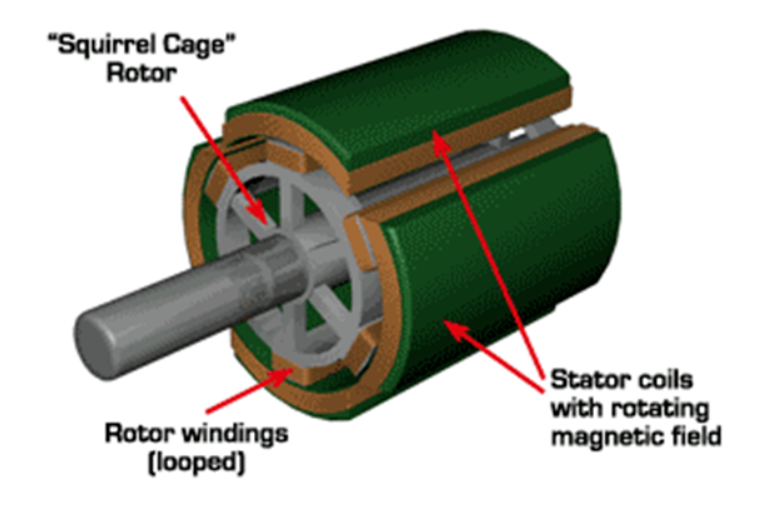
Motor asinkron memiliki mekanisme sederhana dengan rotor koil tertutup, seperti tipe sangkar tupai.
Kumparan rotor akan memotong medan magnet yang berputar untuk menghasilkan potensial listrik yang diinduksi, yang pada gilirannya menghasilkan arus yang diinduksi, dan akhirnya medan magnet yang berputar.
Agar rotor menjadi elektromagnet dan akan mengikuti putaran medan magnet stator, maka kecepatan rotor harus < medan magnet putar stator, sehingga dapat memotong garis induksi magnet.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Yaitu, kecepatan asinkron rotor <kecepatan sinkron, ada perbedaan kecepatan antara medan magnet rotor dan stator, sehingga disebut motor asinkron.
Kecepatan pengenal motor asinkron sedikit berbeda dari pabrikan ke pabrikan, sekitar 2800+r/mnt untuk motor 2 kutub, 1400+,950+,700+ untuk asinkron 4 kutub, 6 kutub, dan 8 kutub.
Kecepatan motor asinkron tinggi saat tanpa beban, dan menurun saat ada beban.
Motor asinkron memiliki struktur sederhana, perawatan mudah, pengoperasian andal, dan harga murah, sehingga banyak digunakan.
4. Motor AC tiga fase - motor sinkron
motor sinkron.
Jika Anda membiarkan kecepatan rotor = kecepatan putaran medan magnet stator, itu menjadi motor sinkron, saat ini perlu mengubah stator menjadi elektromagnet atau magnet permanen, yaitu memberi energi pada stator, saat ini tidak perlu lagi untuk memotong garis induksi magnet dapat berputar, kecepatan putaran dan kecepatan putaran medan magnet adalah sama, yaitu pembentukan motor sinkron.
Struktur rotor motor sinkron lebih kompleks daripada motor asinkron, harga tinggi, dalam masa produksi tidak banyak digunakan sebagai motor asinkron, terutama digunakan sebagai generator, sekarang pembangkit listrik tenaga panas, pembangkit listrik tenaga air, turbin uap, turbin hidrolik pada dasarnya adalah motor sinkron.
5. Motor AC Tiga Fase - Regulasi Kecepatan Motor Listrik Asinkron
Pengaturan kecepatan motor asinkron: secara teoritis, frekuensi AC kontrol motor asinkron, tegangan, atau resistansi rotor, distribusi kutub motor dapat menjadi pengaturan kecepatan, tetapi dalam praktiknya untuk mencapai pengaturan kecepatan tak terbatas dengan metode penyesuaian frekuensi dan tegangan untuk mencapai.
Karena rentang kecepatan pengaturan voltase tidak besar, umumnya hanya dapat digunakan dalam persyaratan kontrol kecepatan yang tidak tinggi, aplikasinya tidak tersebar luas.
Pengaturan kecepatan frekuensi variabel: Berbicara tentang frekuensi, kita mungkin pernah mendengarnya.
Nama lengkap konversi frekuensi adalah Variable Voltage Variable Frequency (VVVF), yang artinya tegangan berubah ketika frekuensi diubah, sehingga rentang kecepatan motor asinkron cukup besar.
Konverter frekuensi dapat dibagi menjadi dua kategori besar: konverter frekuensi AC-AC dan konverter frekuensi AC-DC.
Inverter AC-DC: Daya AC langsung diubah menjadi daya AC frekuensi lain oleh elektronika daya.
Frekuensi output maksimum tidak dapat melebihi setengah dari frekuensi input, sehingga umumnya hanya digunakan dalam sistem kecepatan rendah, kapasitas tinggi, dan dapat menghilangkan kebutuhan peredam roda gigi yang besar.
Inverter AC-DC akan memperbaiki daya AC menjadi DC terlebih dahulu, kemudian mengubahnya menjadi AC dengan frekuensi dan tegangan yang dapat dikontrol melalui inverter, dengan teknologi PWM, inverter jenis ini dapat mewujudkan berbagai tegangan dan frekuensi variabel.
Untuk kendaraan listrik, motor asinkron tahan lama, kapasitas beban berlebih yang kuat, dan algoritme kontrolnya sangat matang sehingga dapat digunakan sepenuhnya.
6. Motor AC tiga fase - Regulasi kecepatan motor sinkron
Pengaturan kecepatan motor sinkron:
Mesin sinkron tidak memiliki kecepatan turndown, dan tegangan kontrol tidak dapat mengubah kecepatan saat struktur ditentukan, jadi sebelum munculnya konverter frekuensi, motor sinkron sama sekali tidak diatur.
Munculnya konverter frekuensi membuat motor sinkron AC juga memiliki rentang pengaturan kecepatan yang sangat besar, karena rotornya juga memiliki eksitasi independen (magnet permanen atau eksitasi listrik), rentang pengaturan kecepatannya lebih lebar daripada motor asinkron, dan motor sinkron memiliki diberi kehidupan baru.
Sistem kontrol kecepatan variabel tegangan variabel motor sinkron dapat dibagi menjadi kontrol kecepatan variabel lain yang dikendalikan dan kontrol kecepatan variabel yang dikendalikan sendiri.
Untuk pengaturan kecepatan frekuensi variabel yang dikontrol lainnya, ini mirip dengan pengaturan frekuensi variabel motor asinkron, yang dapat dikontrol oleh SVPWM dan metode kontrol lainnya sesuai dengan model matematisnya, dan kinerjanya lebih baik daripada motor asinkron AC biasa.
Motor sinkron inverter yang dikendalikan sendiri dulu memiliki berbagai nama dalam proses pengembangan, seperti motor tanpa komutator; ketika menggunakan magnet permanen dan memasukkan gelombang sinus tiga fase, itu dapat disebut motor sinkron magnet permanen gelombang sinus; dan jika memasukkan gelombang persegi, maka itu bisa disebut motor sinkron magnet permanen gelombang trapesium, ya, mirip dengan mesin DC brushless (BLDM) yang disebutkan sebelumnya, kami tidak merasakan lingkaran besar rap telah berputar Kembali, tetapi Anda sekarang harus memiliki pemahaman yang lebih dalam tentang kecepatan variabel, jadi motor DC tanpa sikat saat menggunakan input DC, tetapi penggunaan teknologi konversi frekuensi motor sinkron (struktur yang sama dengan motor sinkron magnet permanen), dalam Model3 tentang penggunaan motor tanpa sikat DC .
7. Motor Asinkron AC fase tunggal-Motor Seri-Ekskit Seri AC tunggal (kuas)
Motor seri-bersemangat AC fase tunggal, umumnya dikenal sebagai motor seri-bersemangat atau motor universal (nama asing UniversalMotor, dinamai karena AC dan DC universal), belitan angker dan belitan eksitasi dihubungkan secara seri untuk bekerja bersama.
Motor seri-bersemangat fase tunggal juga disebut motor seri-bersemangat AC-DC penggunaan ganda, yang dapat bekerja dengan daya AC atau daya DC.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Keuntungan dari motor eksitasi seri fase tunggal adalah memiliki kecepatan tinggi, torsi awal yang tinggi, ukuran kecil, ringan, tidak mudah untuk memblokir putaran, rentang tegangan yang berlaku luas, dan dapat diatur kecepatannya dengan metode pengaturan tegangan. , yang sederhana dan mudah diwujudkan.
Oleh karena itu, banyak digunakan pada perkakas listrik, seperti penggiling sudut, bor tangan, dll.
Struktur motor seri-bersemangat fase tunggal sangat mirip dengan motor DC seri-bersemangat, perbedaan utama adalah bahwa inti stator motor seri-bersemangat fase tunggal harus terbuat dari baja silikon yang dilaminasi, sedangkan kutub magnet DC dapat dibuat dari struktur laminasi dan integral.
Pengaturan kecepatan motor seri fase tunggal, sebagian besar metode yang digunakan untuk mengatur voltase, adalah mengubah potensial listrik.
Metode regulasi tegangan motor seri-fase fase tunggal menggunakan regulasi tegangan pergeseran fase terkontrol, yang menggunakan tegangan pemicu SCR untuk tertinggal di belakang tegangan input untuk mencapai pemicu pergeseran fase dari tegangan input.
Terdapat metode perangkat keras dan perangkat lunak dalam implementasinya.
Metode voltase yang diatur, menggunakan teknologi kontrol kecepatan yang dikontrol silikon, memiliki garis sederhana, ukuran kecil komponen dan karakteristik lain dari metode sederhana dan efektif yang dikontrol silikon
(a) kurva variasi arus AC;
(b) Arah putaran rotor ketika arus setengah gelombang positif
(c) Arah putaran rotor ketika arus setengah gelombang negatif

8. Motor Asinkron AC tunggal-Motor Squirrel-Cage AC tunggal (Brushless)
Arus satu fasa melalui belitan jangkar menghasilkan medan magnet yang berdenyut daripada medan magnet yang berputar, sehingga motor asinkron satu fasa tidak dapat dimulai sendiri.
Untuk mengatasi masalah penyalaan, motor asinkron bertenaga AC satu fasa sering dibuat menjadi dua fasa.
Belitan utama ditenagai langsung oleh catu daya fase tunggal; belitan sekunder secara spasial berbeda dari belitan utama sebesar 90° (sudut listrik, sama dengan sudut mekanis dibagi dengan jumlah pasangan kutub motor).
Belitan sekunder dihubungkan ke catu daya AC fase tunggal setelah koneksi seri kapasitor atau resistor, sehingga arus yang melewatinya dan arus pada belitan utama memiliki perbedaan fase tertentu.
Ini membuat medan magnet sintetik menjadi medan putar elips, atau bahkan mungkin mendekati medan putar melingkar.
Motor dengan demikian memperoleh torsi awal.
Motor yang menggunakan metode pemisahan fasa resistansi tidak mahal, misalnya belitan sekunder dapat dililit dengan kawat yang lebih tipis, tetapi efek pemisahan fasanya buruk dan energi dikonsumsi dalam resistansi.
Setelah motor dihidupkan dan mencapai kecepatan tertentu, belitan sekunder biasanya dilepas secara otomatis oleh sakelar sentrifugal yang dipasang pada poros motor untuk mengurangi kerugian resistif dan meningkatkan efisiensi pengoperasian.
Ini umumnya digunakan untuk kebutuhan torsi awal yang tidak tinggi, seperti mesin bubut kecil, lemari es kecil, dll. Kerugiannya adalah kecepatannya tidak dapat disesuaikan.
Dimungkinkan untuk membuat medan magnet sintetik motor dekat dengan medan magnet putar melingkar pada titik kerja motor tertentu, untuk mendapatkan karakteristik kerja yang lebih baik.
Untuk membuat motor asinkron fase terpisah memperoleh kinerja awal yang lebih baik atau karakteristik operasi yang lebih baik atau keduanya, kapasitansi (jumlah nilai) yang diperlukan berbeda dan dapat dibagi menjadi tiga jenis.
9. Stepper Motors - Open -Loop Stepper Motors
Motor stepper (loop terbuka) adalah motor yang dikontrol loop terbuka yang mengubah sinyal pulsa listrik menjadi perpindahan sudut, dan sangat banyak digunakan.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Jumlah pulsa dapat dikontrol untuk mengontrol jumlah perpindahan sudut, sehingga mencapai tujuan pemosisian yang akurat; pada saat yang sama, frekuensi pulsa dapat dikontrol untuk mengontrol kecepatan dan percepatan putaran motor, sehingga mencapai tujuan pengaturan kecepatan.
Motor stepper adalah sejenis motor induksi, yang bekerja dengan menggunakan rangkaian elektronik, yaitu driver, untuk mengubah daya DC menjadi arus kontrol waktu multi-fase bertenaga pembagian waktu.
Meskipun motor stepper ditenagai oleh arus DC, mereka tidak dapat dipahami sebagai motor DC, yang merupakan motor daya yang mengubah energi listrik DC menjadi energi mekanik, sedangkan motor stepper adalah motor kontrol loop terbuka yang mengubah sinyal pulsa listrik menjadi perpindahan sudut.
10. Stepper Motor - Perbandingan Stepper Servo
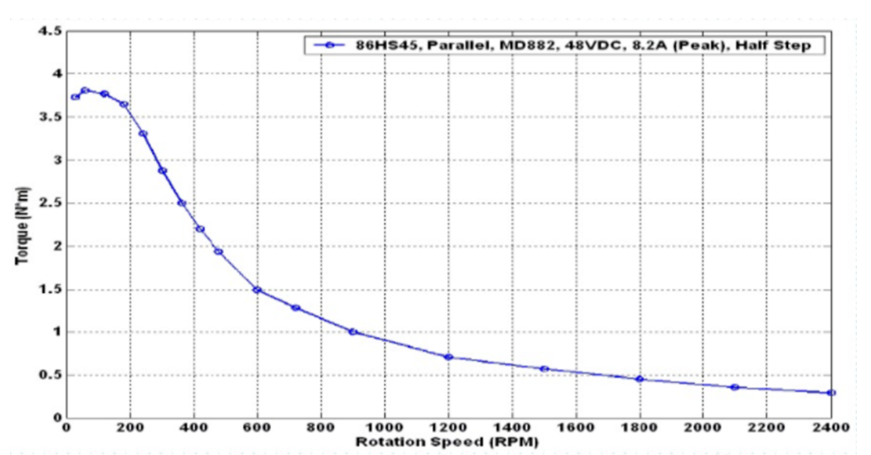
Perhatikan bahwa motor stepper digunakan dalam aplikasi berkecepatan rendah-tidak lebih dari 1000R/menit per menit, kisaran kerja terbaik adalah 150 ~ 500r/menit, (loop tertutup melangkah hingga 1500).
Motor stepper 2 fase pada 60 ~ 70r/mnt rentan terhadap fenomena resonansi kecepatan rendah, menghasilkan getaran dan kebisingan, yang perlu dihindari dengan mengubah rasio reduksi, meningkatkan fraksi halus, menambahkan peredam magnet, dll.
Tindakan pencegahan akurasi subdivisi, ketika tingkat subdivisi lebih besar dari 4, keakuratan sudut langkah tidak dapat dijamin, persyaratan presisi tinggi, yang terbaik adalah beralih ke fase yang lebih banyak (yaitu, sudut langkah yang lebih kecil) dari motor stepper atau closed- stepper loop, motor servo.
(Loop terbuka) motor stepper dan motor servo 7 berbeda.
Akurasi Kontrol - Akurasi kontrol motor servo dapat diatur sesuai dengan encoder, akurasi yang lebih tinggi.
B Karakteristik frekuensi rendah - motor stepper rentan terhadap getaran pada frekuensi rendah, motor servo tidak.
C Moment -Frekuensi Karakteristik - Torsi motor stepper menjadi lebih kecil dengan peningkatan kecepatan, sehingga kecepatan operasi maksimumnya umumnya <1000r/min, motor servo dalam kecepatan pengenal (umumnya 3000r/min) dapat menghasilkan torsi pengenal, dalam kecepatan pengenal di atas output daya konstan, kecepatan maksimum hingga 5000 r/min;.
D Kapasitas kelebihan beban - Motor stepper tidak dapat kelebihan beban, torsi motor maksimum servo dapat kelebihan beban 3 kali.
E Operasi Kinerja-Motor stepper untuk kontrol loop terbuka, motor servo saat kontrol loop tertutup.
F REPON KECEPATAN - Waktu start -up motor stepper 0,15 ~ 0,5S, motor servo 0,05 ~ 0,1, 0,01s tercepat untuk mencapai nilai 3000R / menit.
G Indikator Efisiensi - Efisiensi motor stepper sekitar 60%, motor servo sekitar 80%.
Dalam penggunaan aktual akan ditemukan: motor servo mahal, mahal dari banyak, sehingga motor sinkron lebih banyak digunakan, terutama dalam persyaratan akurasi pemosisian tidak terlalu tinggi penggerak sabuk sinkron, konveyor sabuk datar dan kesempatan lain sering menggunakan motor stepper.
11. Stepper Motors - Loop Stepper Motors Tertutup
Motor stepper loop tertutup: Selain motor stepper loop terbuka, ada motor stepper yang memiliki enkoder yang ditambahkan ke ujung motor, memungkinkan kontrol loop tertutup.
Kontrol loop tertutup motor stepper menggunakan umpan balik posisi dan/atau umpan balik kecepatan untuk menentukan transisi fase yang sesuai dengan posisi rotor, yang dapat sangat meningkatkan kinerja motor stepper.
Sistem servo tanpa fenomena out-of-step.
Keuntungan motor stepper loop tertutup.
1. Respon kecepatan tinggi. Dibandingkan dengan motor setelan, stepper loop tertutup memiliki perintah pemosisian yang sangat kuat, sehingga waktu pemosisian sangat singkat. Dalam penerapan start/stop yang sering, waktu pemosisian dapat dipersingkat secara signifikan.
2. Menghasilkan torsi lebih dari servo biasa. Menebus kurangnya kehilangan langkah dan getaran kecepatan rendah dari sistem stepper biasa.
3. Torsi tinggi dapat dihasilkan bahkan di bawah beban 100%, tanpa kehilangan operasi langkah, tanpa mempertimbangkan kehilangan torsi dan masalah lain seperti sistem pijakan biasa.
4. Dengan menerapkan drive loop tertutup, efisiensi dapat ditingkatkan menjadi 7,8 kali, daya keluaran dapat ditingkatkan menjadi 3,3 kali, dan kecepatan dapat ditingkatkan menjadi 3,6 kali.
Itu bisa mendapatkan kecepatan lari yang lebih tinggi, kecepatan lebih stabil dan lebih halus daripada kontrol loop terbuka.
5. Motor stepper akan benar-benar diam saat berhenti, tanpa fenomena getaran mikro dari servo biasa.
Itu dapat menggantikan penerapan sistem servo tujuan umum ketika biaya rendah dan pemosisian presisi tinggi diperlukan.
12. Stepper Motor - Perbandingan Servo Loop Tertutup Stepper
Motor stepper loop tertutup secara otomatis menyesuaikan ukuran arus belitan sesuai dengan ukuran beban, panas dan getaran lebih kecil dari stepper loop terbuka, ada umpan balik enkoder sehingga akurasi lebih tinggi dari motor stepper biasa, respons motor daripada loop terbuka stepper lebih lambat dari motor servo lebih cepat, ada kesalahan posisi selama operasi, kesalahan secara bertahap akan berkurang dalam milidetik setelah perintah berhenti.
Torsi berkecepatan tinggi daripada stepper loop terbuka, aplikasi umum pada kesempatan 0-1500rpm.
Singkatnya: motor stepper loop tertutup dengan biaya rendah, efisiensi tinggi, tidak ada jitter, tidak ada getaran mikro berhenti, kekakuan tinggi, tidak ada perbaikan, kecepatan tinggi, respons dinamis tinggi, dll., Adalah pengganti sistem servo berbiaya tinggi, sistem stepper loop terbuka kelas bawah dan solusi hemat biaya lainnya
13. Servo Motor - Motor Servo Umum
Motor servo (motor servo), juga disebut motor aktuator, dapat membuat kecepatan kontrol, akurasi posisi sangat akurat, dapat mengubah sinyal tegangan menjadi torsi dan kecepatan untuk menggerakkan objek kontrol.
Berbeda dengan struktur prinsip motor stepper, motor servo adalah motor DC standar atau motor induksi AC karena rangkaian kontrol diletakkan di luar motor, dan bagian motor di dalamnya.
Motor servo mengandalkan pulsa untuk penentuan posisi. Ketika motor servo menerima 1 pulsa, motor berputar dengan sudut yang sesuai dengan 1 pulsa.
Setiap kali motor memutar sudut, pembuat enkode akan mengirimkan jumlah pulsa umpan balik yang sesuai. Pulsa umpan balik dan pulsa yang diterima oleh driver servo membentuk kontrol loop tertutup, sehingga driver servo dapat mengontrol putaran motor dengan sangat tepat untuk mencapai posisi yang tepat.
Kontrol motor servo: Umumnya, motor servo untuk keperluan industri dikendalikan oleh tiga loop, yaitu loop arus, loop kecepatan, dan loop posisi, yang masing-masing dapat memberi umpan balik pada percepatan sudut, kecepatan sudut, dan posisi rotasi dari operasi motor.
Chip mengontrol arus penggerak setiap fase motor melalui umpan balik dari ketiganya, sehingga kecepatan dan posisi motor dapat berjalan akurat sesuai jadwal.
Servo AC memiliki fitur torsi konstan di bawah kecepatan pengenal, kecepatan pengenal servo AC inersia rendah 200W, 400W rendah dan sedang adalah 3000rpm, kecepatan tertinggi adalah 5000rpm, kecepatan tinggi.
Torsi sebanding dengan arus, sehingga dapat bekerja dalam mode torsi, seperti mengunci sekrup, menekan terminal dan kesempatan lain yang membutuhkan torsi konstan.
Kebisingan dan getaran kerja servo AC sangat kecil, panas yang dihasilkan rendah.
Volume inersia rotor inersia motor yang sama kecil, inersia servo 400W hanya setara dengan inersia rotor motor stepper 57 basis 2NM.
Servo memiliki kapasitas kelebihan waktu yang singkat, pemilihannya perlu mempertimbangkan pengali kelebihan beban motor saat akselerasi dan deselerasi.
Servo menggunakan kontrol loop tertutup dan memiliki kesalahan pelacakan posisi yang sama dengan stepper loop tertutup.
Servo membutuhkan komisioning sebelum digunakan.
Torsi asli dari motor stepper dan servo tidak cukup, seringkali perlu bekerja dengan peredam, Anda dapat menggunakan set roda gigi reduksi atau peredam planet.
6. Motor Servo - Servo
Servo adalah kelas motor servo DC, pertama kali digunakan untuk model pesawat kecil dan sekarang digunakan untuk sambungan robot kecil.
Dari analisis struktural, servo terdiri dari motor DC kecil, plus sensor, chip kontrol, dan rangkaian roda gigi reduksi, yang dipasang ke dalam wadah terintegrasi.
Itu dapat mengontrol sudut rotasi melalui sinyal input (biasanya sinyal PWM, tetapi juga sinyal digital).
Karena ini adalah versi yang disederhanakan, kontrol tiga loop asli dari motor servo disederhanakan menjadi satu loop, yaitu hanya loop posisi yang terdeteksi.
Solusi murah adalah potensiometer, yang dideteksi oleh resistor, sedangkan solusi lanjutan akan menggunakan sensor Hall, atau encoder.
Servo umum tidak mahal dan kompak, tetapi memiliki akurasi yang sangat rendah dan kemampuan menenangkan posisi yang buruk, dan dapat memenuhi banyak kebutuhan kelas bawah.
Dengan booming robot kecil kelas konsumen dalam dua tahun terakhir, servos kecil dan ringan langsung menjadi komponen sambungan yang paling cocok.
Namun, sambungan robot membutuhkan kinerja yang jauh lebih tinggi daripada servos udara, dan sebagai produk komersial juga membutuhkan servos dengan kualitas yang jauh lebih tinggi daripada pemain DIY.
Selamat datang untuk berbagi dengan kami informasi lebih lanjut tentang motor listrik di area komentar!
Setiap pertanyaan tentang motor listrik, silakan hubungi motor listrik profesional pabrikan di dalam Cina sebagai berikut:
Motor Dongchun memiliki berbagai macam motor listrik yang digunakan di berbagai industri seperti transportasi, infrastruktur, dan konstruksi.
Dapatkan balasan segera.






