Nearly half of the world's power consumption is consumed by electric motors, so the high efficiency of electric motors is said to be the most effective measure in solving the world's energy problems.
En général, il se réfère à la transformation de la force générée par le flux de courant dans un champ magnétique en une action rotative, et dans une large gamme, il comprend également une action linéaire.
Et selon le principe de rotation du moteur, il peut être grossièrement divisé dans les catégories suivantes. (Sauf moteurs spéciaux)
Moteur électrique à courant continu/moteurs à courant continu (courant continu)
Moteurs brossés
Les moteurs à balais largement utilisés sont généralement appelés moteurs électriques à courant continu.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Moteur CC sans balais
Les moteurs à courant continu sans balais n'utilisent pas de balais ni de commutateurs, mais utilisent une fonction de commutation telle qu'un transistor pour commuter le courant et effectuer une action de rotation.
Moteur pas à pas.
Ce moteur fonctionne de manière synchrone avec une puissance pulsée et est donc également appelé moteur à induction pulsée.
Il se caractérise par sa capacité à réaliser facilement une opération de positionnement précise.
Moteurs à courant alternatif
Moteur asynchrone
Le courant alternatif génère un champ magnétique rotatif dans le stator, qui à son tour génère un courant induit dans le rotor, dans l'interaction duquel la rotation se produit pour le moteur à induction à courant alternatif.
Moteur synchrone
Le courant alternatif crée un champ magnétique rotatif et le rotor à pôles magnétiques tourne en raison de l'attraction.
-La vitesse de rotation est heureusement synchronisée avec la fréquence de l'alimentation.
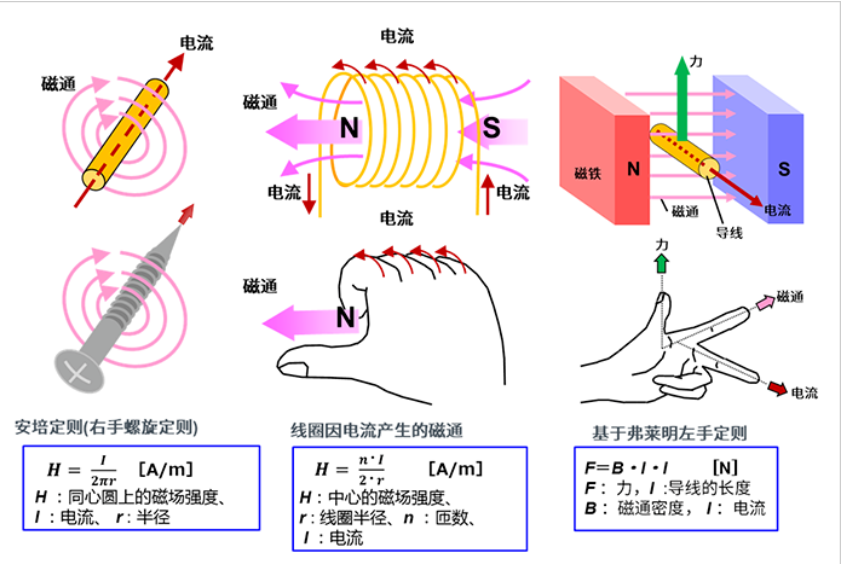
À propos des courants, des champs magnétiques et des forces
First, for the sake of subsequent motor principle explanations, let's review the basic laws/laws regarding current, magnetic field and force.
Bien qu'il y ait un sentiment de nostalgie, il est facile d'oublier cette connaissance si vous n'utilisez pas habituellement des composants magnétiques
Nous combinons des images et des formules pour illustrer.
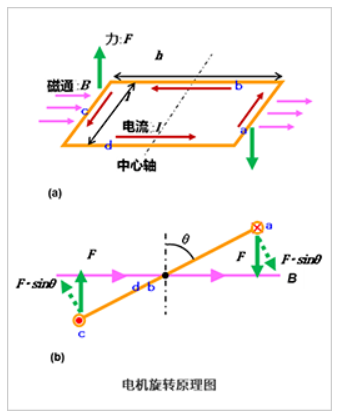
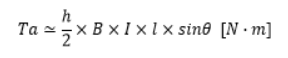
Lorsque le fil de fer est rectangulaire, la force agissant sur le courant est prise en compte.
La force F agissant sur les parties des côtés a et c est
Le couple est généré avec l'axe central comme axe central.
Par exemple, lorsque l'on considère un état où l'angle de rotation n'est que θ, la force agissant perpendiculairement à b et d est sinθ, donc le couple Ta de la pièce a est donné par :
En considérant la partie c de la même manière, le couple est doublé et génère le couple calculé par l'équation suivante
Puisque l'aire du rectangle est S = h・l, sa substitution dans l'équation ci-dessus donne le résultat suivant.
La formule s'applique non seulement aux rectangles, mais également à d'autres formes courantes telles que les cercles. Le moteur utilise ce principe.
Comment tourne un moteur électrique ?
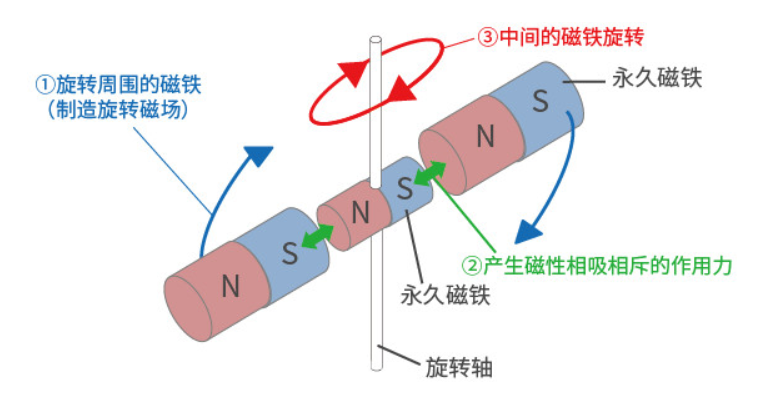
1) Les moteurs à induction tournent à l'aide d'aimants et de la force magnétique
Autour d'un aimant permanent à arbre tournant,
① l'aimant est tourné (de sorte qu'un champ magnétique tournant est généré),
② puis selon le principe que les pôles N et S s'attirent à des pôles différents et se repoussent au même niveau,
③ l'aimant avec un arbre rotatif tournera.
C'est le principe de base de la rotation des moteurs à courant alternatif.
Le courant circulant dans le conducteur provoque un champ magnétique tournant (force magnétique) autour de lui et ainsi l'aimant tourne, ce qui est pratiquement le même état d'action que celui-ci.
De plus, lorsque le fil est enroulé en forme de bobine, la force magnétique est synthétisée, créant un flux de champ magnétique important (flux) qui produit des pôles N et S.
De plus, en insérant un noyau de fer dans le fil en forme de bobine, les lignes de force magnétiques deviennent faciles à traverser et une force magnétique plus forte peut être générée.
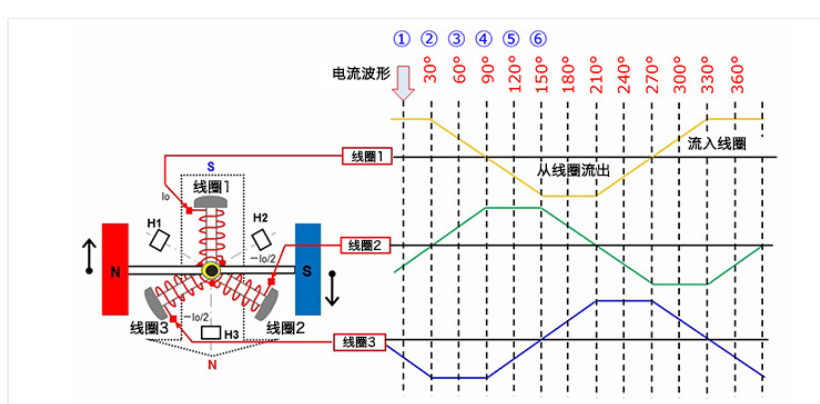
2) Moteur tournant réel
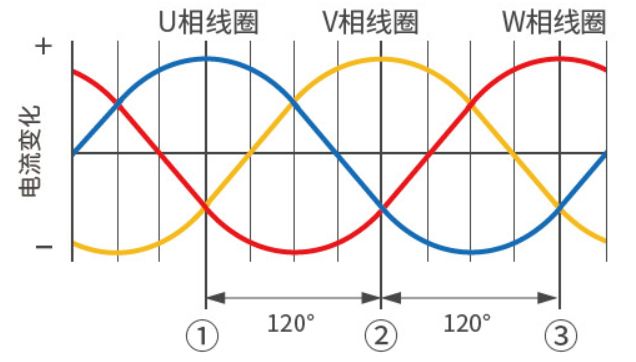
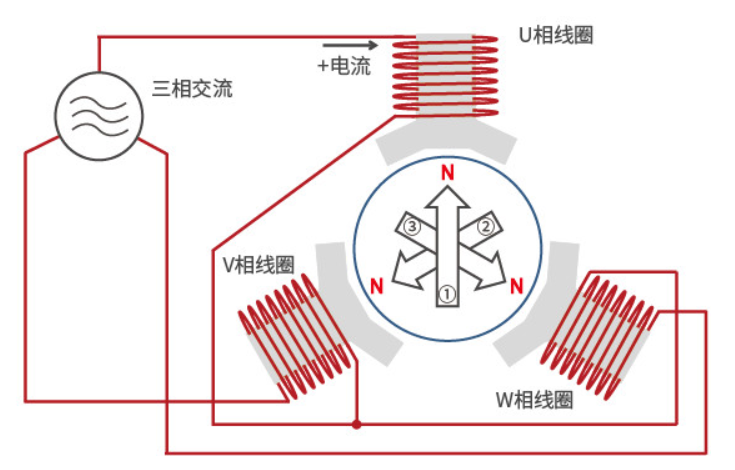
Ici, en tant que méthode pratique de rotation du moteur, nous introduisons la méthode de création d'un champ magnétique rotatif à l'aide d'un moteur à courant alternatif triphasé et de bobines.
(Les moteurs industriels AC triphasés sont un signal AC espacé de 120° en phase)
Le champ magnétique synthétique dans l'état ① ci-dessus correspond à la figure ① ci-dessous.
Le champ magnétique synthétique dans l'état ② ci-dessus correspond à la figure ② ci-dessous.
Le champ magnétique synthétique dans l'état ③ ci-dessus correspond à la figure ③ ci-dessous.
Comme mentionné ci-dessus, les bobines du noyau enroulé sont divisées en trois phases, avec une configuration d'intervalle de 120 ° des bobines de phase U, des bobines de phase V et des bobines de phase W, avec la bobine à haute tension produisant le pôle N et le bobine avec pôle S produisant une basse tension.
Chaque phase change selon une onde sinusoïdale, donc la polarité (pôle N, pôle S) et son champ magnétique (force magnétique) généré par chaque bobine vont changer.
À ce moment, la bobine qui produit le pôle N seul change de séquence en fonction de la bobine de phase U → bobine de phase V → bobine de phase W → bobine de phase U, et ainsi la rotation se produit.
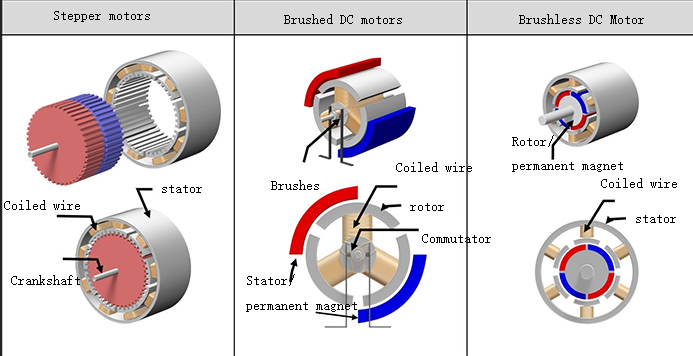
Structure d'un petit moteur
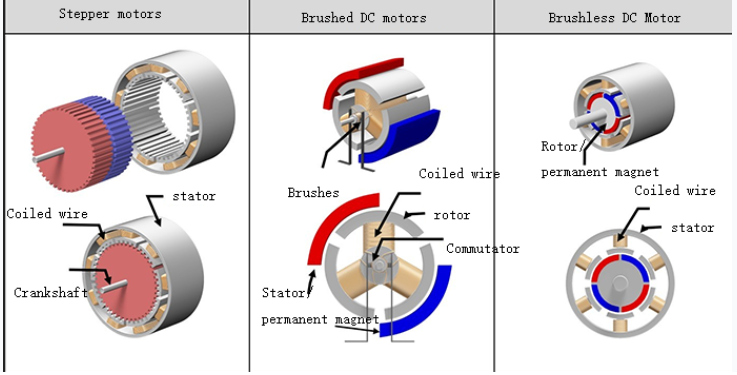
La figure suivante donne la structure approximative et la comparaison de trois types de moteurs industriels : les moteurs pas à pas, les moteurs CC (CC) à balais et les moteurs CC (CC) sans balais.
Les composants de base de ces moteurs sont principalement des bobines, des aimants et des rotors, et il existe également des types à bobine fixe et à aimant fixe selon le type.
Voici une description de la structure associée à l'exemple de diagramme. Puisqu'il peut y avoir d'autres structures si elles sont divisées plus soigneusement, veuillez comprendre que la structure présentée dans cet article est sous un grand cadre.
La bobine du moteur pas à pas est ici fixée sur le côté extérieur et l'aimant est tourné sur le côté intérieur.
Ici, l'aimant du moteur à courant continu à balais est fixé sur le côté extérieur et la bobine tourne sur le côté intérieur. J
Les balais et le collecteur sont chargés d'alimenter la bobine et de changer le sens du courant.
Dans le cas d'un moteur brushless, la bobine est fixe à l'extérieur et l'aimant tourne à l'intérieur.
La structure d'un moteur brushless est différente même si les composants de base sont les mêmes en raison des différents types de moteurs. Les détails seront expliqués dans chaque section.
Moteur à brosse
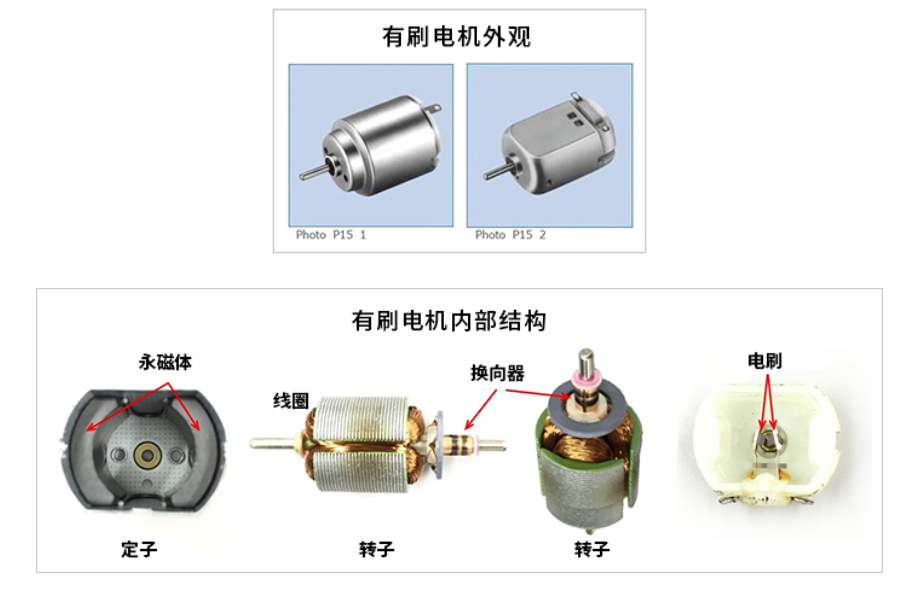
Structure des moteurs à courant continu à balais
Vous trouverez ci-dessous l'apparence d'un moteur à courant continu à balais souvent utilisé dans les modèles, et un schéma de principe de la panne d'un moteur de type normal à deux pôles (2 aimants) à trois fentes (3 bobines). Peut-être que beaucoup d'entre vous ont de l'expérience dans le démontage du moteur électrique à courant continu et le retrait des aimants.
Vous pouvez voir que les aimants permanents d'un moteur à courant continu à balais sont fixes et que les bobines d'un moteur à courant continu à balais peuvent tourner autour du centre interne.
The fixed side is called the "stator" and the rotating side is called the "rotor".
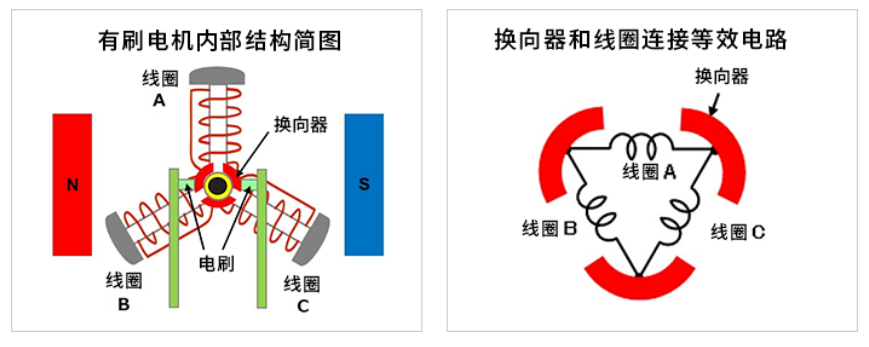
Ce qui suit est un croquis structurel représentant le concept de structure.
La périphérie de l'axe central tournant comporte trois collecteurs (tôles pliées pour la commutation du courant).
Pour éviter tout contact entre eux, les collecteurs sont configurés à 120° l'un de l'autre (360° ÷ 3 pièces). Les collecteurs tournent avec la rotation de l'arbre.
Un commutateur est connecté à une extrémité de bobine et à l'autre extrémité de bobine, et les trois commutateurs et les trois bobines forment un tout (anneau) en tant que réseau de circuits.
Deux balais sont fixés à 0° et 180° pour faire contact avec le collecteur.
Une alimentation externe en courant continu est connectée aux balais et le courant circule dans le chemin balai → collecteur → bobine → balai.
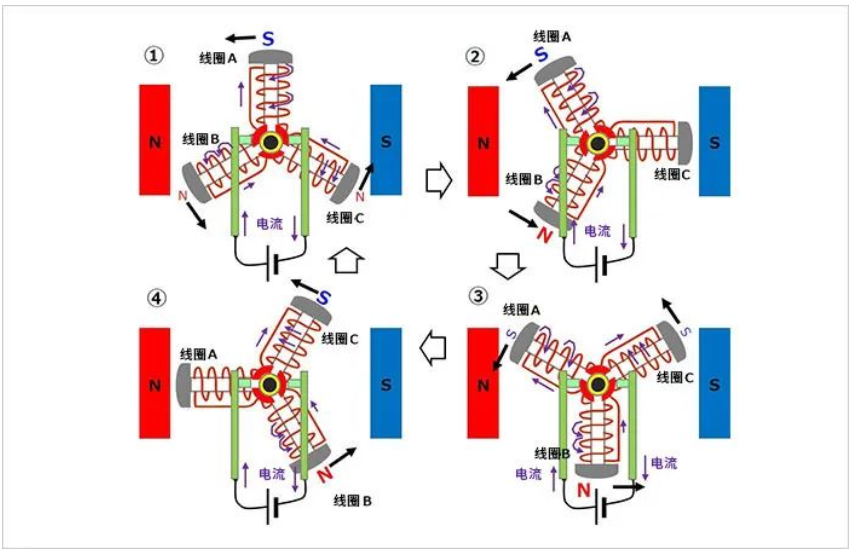
Principe de rotation du moteur à courant continu à balais
① Rotation dans le sens antihoraire à partir de l'état initial
La bobine A se trouve dans la partie la plus haute et relie l'alimentation des outils électriques aux brosses, réglez le côté gauche sur (+) et le côté droit sur (-).
Un courant important circule du balai gauche à travers le commutateur vers la bobine A.
C'est la structure où la partie supérieure (extérieure) de la bobine A devient le pôle S.
Et puisque la moitié du courant de la bobine A circule de la brosse gauche vers les bobines B et C dans le sens opposé de la bobine A, les côtés extérieurs des bobines B et C deviennent des pôles N faibles (indiqués par des lettres légèrement plus petites dans le chiffre).
Les champs magnétiques générés dans ces bobines et les effets répulsifs et attractifs des aimants font que les bobines sont soumises à une force de rotation dans le sens inverse des aiguilles d'une montre.
② Rotation supplémentaire dans le sens inverse des aiguilles d'une montre
Ensuite, supposons que le balai droit est en contact avec les deux commutateurs dans un état où la bobine A est tournée de 30° dans le sens antihoraire.
Le courant de la bobine A circule en continu de la brosse gauche à travers la brosse droite et le côté extérieur de la bobine reste au pôle S.
Le même courant que la bobine A traverse la bobine B et le côté extérieur de la bobine B devient un pôle N plus fort.
Comme les extrémités de la bobine C sont court-circuitées par les balais, aucun courant ne circule et aucun champ magnétique n'est généré.
Même dans ce cas, il existe une force de rotation dans le sens inverse des aiguilles d'une montre.
La bobine sur le côté supérieur de ③ à ④ est continuellement soumise à une force se déplaçant vers la gauche, et la bobine inférieure est continuellement soumise à une force se déplaçant vers la droite et continue de tourner dans le sens antihoraire
Lorsque la bobine tourne tous les 30° vers ③ et ④, le côté extérieur de la bobine devient le pôle S lorsque la bobine est au-dessus de l'axe horizontal central ; lorsque la bobine est en dessous, elle devient le pôle N et le mouvement se répète.
En d'autres termes, la bobine supérieure est soumise à plusieurs reprises à une force se déplaçant vers la gauche et la bobine inférieure est soumise à plusieurs reprises à une force se déplaçant vers la droite (les deux dans le sens antihoraire). Cela fait tourner le rotor dans le sens inverse des aiguilles d'une montre à tout moment.
Si l'alimentation est connectée à la brosse gauche opposée (-) et à la brosse droite (+), un champ magnétique est généré dans les enroulements du stator des bobines dans le sens opposé, de sorte que la force appliquée aux bobines se déplace dans le sens opposé et devient rotation dans le sens des aiguilles d'une montre .
De plus, lorsque l'alimentation est coupée, le rotor du moteur à balais s'arrête de tourner car il est privé du champ magnétique qui le maintient en rotation.
Moteur brushless triphasé pleine onde
Aspect et structure d'un moteur brushless triphasé pleine onde
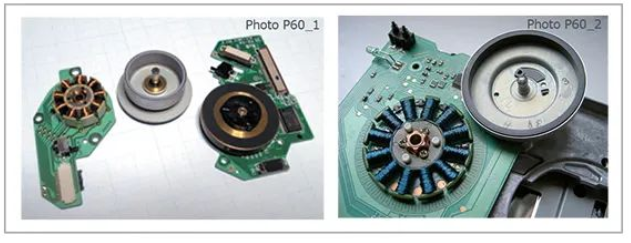
La figure suivante montre un exemple de l'apparence et de la structure d'un moteur sans balais.
Sur la gauche se trouve un exemple de moteur à broche utilisé pour faire tourner un disque dans un appareil de lecture de disque. Il y a 9 bobines de trois phases x 3. À droite, un exemple de moteur de broche pour un appareil FDD avec 12 bobines (triphasé x 4). Les bobines sont fixées sur la carte et enroulées sur le noyau.
La partie en forme de disque sur le côté droit des bobines est le rotor à aimant permanent. L'arbre du rotor est inséré au centre de la bobine et recouvre la partie bobine, et les aimants permanents entourent la périphérie de la bobine.
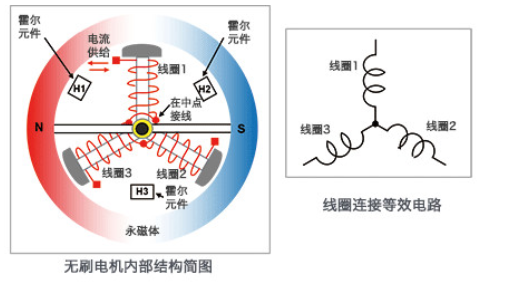
La structure interne du moteur sans balai triphasé à onde pleine et le circuit équivalent de la connexion de la bobine
Vient ensuite un croquis de la structure interne et du circuit équivalent de la connexion de la bobine.
Ce schéma de structure interne est un exemple de moteur 2 pôles (2 aimants) 3 emplacements (3 bobines) avec une structure très simple. Il est similaire à la structure d'un moteur à balais avec le même nombre de pôles et d'encoches, mais le côté bobine est fixe et les aimants peuvent être tournés. Bien sûr, il n'y a pas de pinceaux.
Dans ce cas, les bobines sont connectées en forme de Y et un élément semi-conducteur est utilisé pour fournir du courant aux bobines, contrôlant l'entrée et la sortie de courant en fonction de la position des aimants rotatifs.
Dans cet exemple, un élément Hall est utilisé pour détecter la position de l'aimant. L'élément Hall est configuré entre la bobine et la bobine pour détecter la tension générée et utilisée comme information de position sur la base de l'intensité du champ magnétique. Dans l'image du moteur de broche FDD donnée précédemment, vous pouvez également voir l'élément Hall utilisé pour détecter la position entre la bobine et la bobine (au-dessus de la bobine).
Les éléments à effet Hall sont bien connus en tant que capteurs magnétiques.
Il peut convertir l'amplitude du champ magnétique en amplitude de la tension et indiquer la direction du champ magnétique en termes positifs ou négatifs.
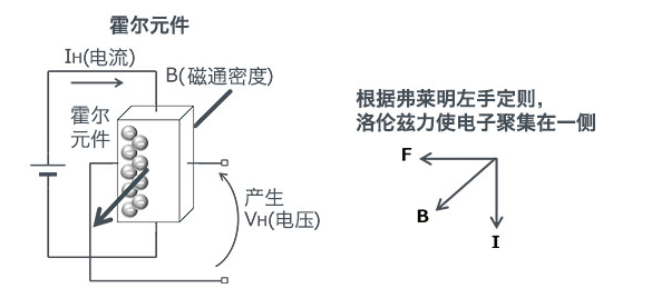
Voici un schéma montrant l'effet Hall.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
La tension résultante VH est exprimée par l'équation suivante.
VH = (KH / d)・IH・B ※KH : Coefficient de Hall, d : épaisseur de la surface de pénétration du flux
Comme le montre la formule, plus le courant est élevé, plus la tension est élevée. Cette propriété est souvent utilisée pour détecter la position du rotor (aimant).
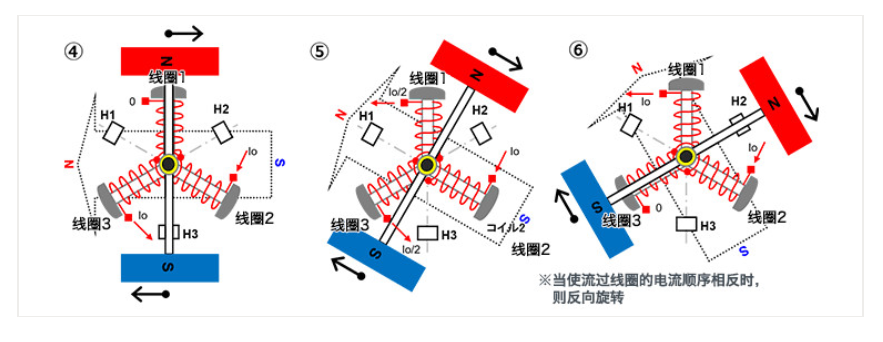
Principe de rotation du moteur brushless triphasé pleine onde
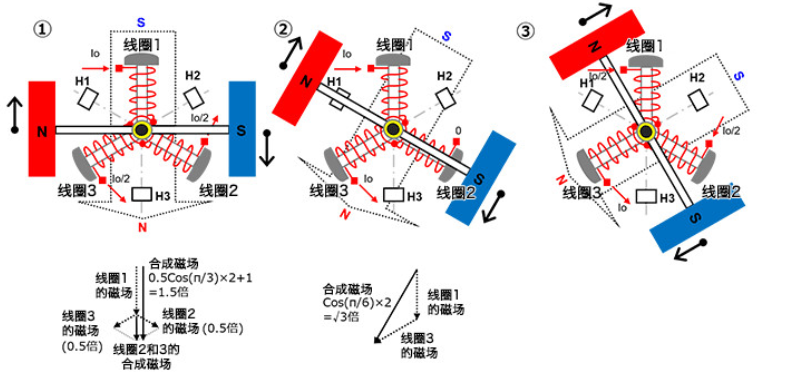
Le principe de rotation du moteur brushless sera expliqué dans les étapes suivantes ① à ⑥. Pour faciliter la compréhension, l'aimant permanent est ici simplifié d'un cercle à un rectangle.
①
In a 3-phase coil, let coil 1 be fixed at 12 o'clock, coil 2 be fixed at 4 o'clock and coil 3 be fixed at 8 o'clock of the clock. Let the N-pole of the 2-pole permanent magnet be on the left side and the S-pole on the right side and rotatable.
Faites circuler le courant Io dans la bobine 1 pour produire le champ magnétique du pôle S à l'extérieur de la bobine. Laissez le courant Io/2 sortir de la bobine 2 et de la bobine 3 pour produire un champ magnétique à N pôles à l'extérieur de la bobine.
Lorsque les champs magnétiques des bobines 2 et 3 sont synthétisés par vecteur, le champ magnétique du pôle N est généré vers le bas, qui est 0,5 fois la taille du champ magnétique généré lorsque le courant Io traverse une bobine, et devient 1,5 fois la taille lorsque ajouté au champ magnétique de la bobine 1. Cela produit un champ magnétique synthétique à un angle de 90° par rapport à l'aimant permanent, de sorte que le couple maximal peut être généré et l'aimant permanent tourne dans le sens des aiguilles d'une montre.
Lorsque le courant dans la bobine 2 est réduit et que le courant dans la bobine 3 est augmenté en fonction de la position de rotation, le champ magnétique synthétique tourne également dans le sens des aiguilles d'une montre et l'aimant permanent continue de tourner.
②
Dans l'état tourné de 30°, le courant Io circule dans la bobine 1 de sorte que le courant dans la bobine 2 est nul, provoquant la sortie du courant Io de la bobine 3.
Le côté extérieur de la bobine 1 devient le pôle S et le côté extérieur de la bobine 3 devient le pôle N. Lorsque le vecteur est synthétisé, le champ magnétique produit est √3 (≈1,72) fois le champ magnétique produit lorsque le courant Io traverse une bobine. Cela produit également un champ magnétique synthétisé à un angle de 90° par rapport au champ magnétique de l'aimant permanent et tourne dans le sens des aiguilles d'une montre.
Lorsque le courant d'entrée Io de la bobine 1 est réduit en fonction de la position de rotation, le courant d'entrée de la bobine 2 est augmenté à partir de zéro et le courant de sortie de la bobine 3 est augmenté à Io, le champ magnétique synthétique tourne également dans le sens des aiguilles d'une montre et le permanent l'aimant continue de tourner.
En supposant que le courant dans chaque phase est sinusoïdal, la valeur du courant ici est Io × sin(π⁄3) = Io × √3⁄2. Par synthèse vectorielle du champ magnétique, la taille totale du champ magnétique est (√3⁄2)2 × 2 = 1,5 fois le champ magnétique généré par une bobine. Lorsque les courants dans chaque phase sont sinusoïdaux, l'amplitude du champ magnétique de synthèse vectorielle est de 1,5 fois le champ magnétique produit par une bobine quelle que soit la position de l'aimant permanent, et le champ magnétique est à un angle de 90° par rapport à le champ magnétique de l'aimant permanent.
③
Dans l'état où la rotation a continué pendant 30°, le courant Io/2 circule dans la bobine 1, le courant Io/2 circule dans la bobine 2 et le courant Io sort de la bobine 3.
Le côté extérieur de la bobine 1 devient le pôle S, le côté extérieur de la bobine 2 devient également le pôle S et le côté extérieur de la bobine 3 devient le pôle N. Lorsque le vecteur est synthétisé, le champ magnétique produit est 1,5 fois le champ magnétique produit lorsque le courant Io traverse une bobine (identique à ①). Ici aussi, un champ magnétique synthétique est généré à un angle de 90° par rapport au champ magnétique de l'aimant permanent et tourne dans le sens des aiguilles d'une montre.
④~⑥
Tourner de la même manière que ① à ③.
De cette manière, si le courant circulant dans la bobine est continuellement commuté séquentiellement en fonction de la position de l'aimant permanent, l'aimant permanent tournera dans un sens fixe. De même, si le courant est inversé et que le sens du champ magnétique synthétique est inversé, il tournera dans le sens antihoraire.
Le schéma suivant montre les courants dans chaque bobine pour chacune des étapes ① à ⑥ ci-dessus successivement. La relation entre le changement de courant et la rotation doit être comprise par la description ci-dessus.
Moteurs pas à pas
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
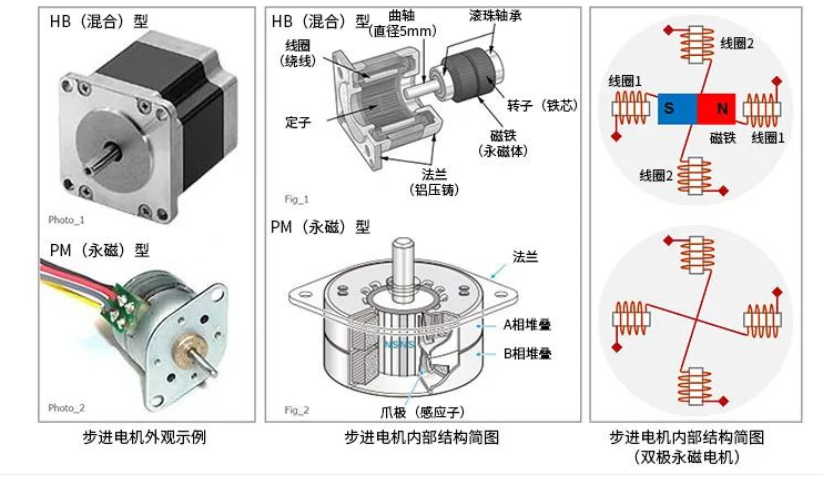
Structure du moteur pas à pas (bipolaire biphasé)
Les diagrammes suivants, de gauche à droite, montrent un exemple de l'apparence d'un moteur pas à pas, un croquis de la structure interne et un croquis du concept de structure.
Dans l'exemple d'apparence, l'apparence des moteurs pas à pas de type HB (hybride) et de type PM (aimant permanent) est donnée. Le schéma de structure au milieu est également donné pour le type HB et le type PM.
Le moteur pas à pas est une structure dans laquelle la bobine est fixe et l'aimant permanent tourne. Le schéma conceptuel de la structure interne d'un moteur pas à pas sur la droite est un exemple de moteur PM utilisant deux phases (deux ensembles) de bobines. Dans l'exemple de structure de moteur pas à pas de base, les bobines sont configurées à l'extérieur et les aimants permanents sont configurés à l'intérieur. En plus des bobines biphasées, il existe également des types avec un plus grand nombre de phases telles que triphasées et cinq phases.
Certains moteurs pas à pas ont d'autres structures différentes, mais la structure de base du moteur pas à pas est donnée dans cet article pour faciliter l'introduction de son principe de fonctionnement. A travers cet article, nous espérons comprendre la structure de base des moteurs pas à pas avec des bobines fixes et des aimants permanents rotatifs.
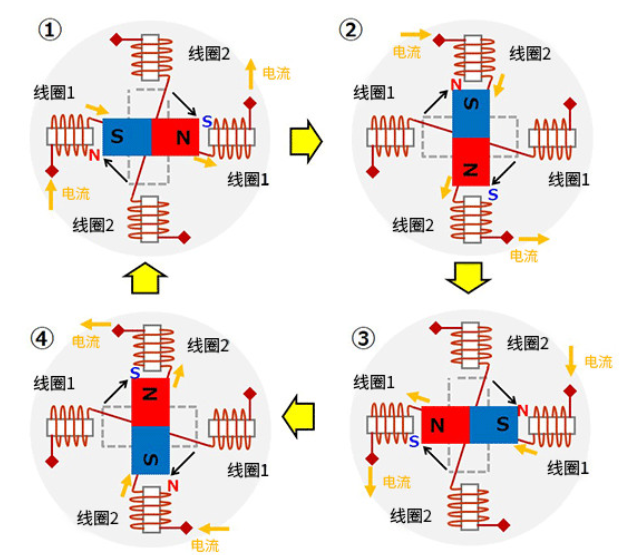
Principe de fonctionnement de base du moteur pas à pas (excitation monophasée)
Le schéma suivant est utilisé pour introduire le principe de fonctionnement de base d'un moteur pas à pas. Ceci est un exemple d'excitation pour chaque phase (ensemble de bobines) des bobines biphasées de type bipolaire ci-dessus. La prémisse du diagramme est que l'état passe de ① à ④. Les bobines sont constituées respectivement de la bobine 1 et de la bobine 2. De plus, les flèches de courant indiquent le sens du flux de courant.
①
・Faites circuler le courant depuis le côté gauche de la bobine 1 et depuis le côté droit de la bobine 1.
・Ne laissez pas le courant circuler dans la bobine 2.
・À ce moment, le côté intérieur de la bobine gauche 1 devient N et le côté intérieur de la bobine droite 1 devient S.
・En conséquence, l'aimant permanent du milieu est attiré par le champ magnétique de la bobine 1 et passe du côté gauche S au côté droit N et s'arrête.
②
・Le courant de la bobine 1 est arrêté de sorte que le courant entre par le côté supérieur de la bobine 2 et sort par le côté inférieur de la bobine 2.
・Le côté intérieur de la bobine supérieure 2 devient N et le côté intérieur de la bobine inférieure 2 devient S.
・L'aimant permanent est attiré par son champ magnétique et tourne de 90° dans le sens des aiguilles d'une montre pour s'arrêter.
③
・Le courant de la bobine 2 est arrêté de sorte que le courant entre du côté droit de la bobine 1 et sort du côté gauche de la bobine 1.
・Le côté intérieur de la bobine gauche 1 devient S et le côté intérieur de la bobine droite 1 devient N.
・L'aimant permanent est attiré par son champ magnétique et tourne dans le sens des aiguilles d'une montre de 90° supplémentaires pour s'arrêter.
④
・Arrêtez le courant dans la bobine 1 afin que le courant entre par le côté inférieur de la bobine 2 et sorte par le côté supérieur de la bobine 2.
・Le côté intérieur de la bobine supérieure 2 devient S et le côté intérieur de la bobine inférieure 2 devient N.
・L'aimant permanent est attiré par son champ magnétique et tourne dans le sens des aiguilles d'une montre de 90° supplémentaires pour s'arrêter.
Le moteur pas à pas peut être mis en rotation en commutant le courant circulant dans la bobine par le circuit électronique dans l'ordre de ① à ④ ci-dessus. Dans cet exemple, chaque action de commutation entraîne une rotation de 90° du moteur pas à pas.
De plus, lorsque le courant circule en continu dans une bobine, l'état d'arrêt peut être maintenu et le moteur pas à pas peut avoir un couple de maintien. Incidemment, si l'ordre du courant circulant dans la bobine est inversé, le moteur pas à pas peut être amené à tourner en sens inverse.
Find a professional industrial motor manufacturer - Dongchun motor China
 Aller au contenu
Aller au contenu