Quelle est la différence entre un moteur brushless et un moteur brushed ?
Quelle est la différence entre un moteur synchrone et un moteur asynchrone ?
Qu'en est-il du moteur à induction à rotor bobiné ?
Tous les servomoteurs sont-ils des moteurs à courant alternatif ?
Tous les servomoteurs sont-ils des moteurs synchrones ?
Les moteurs pas à pas appartiennent-ils aux moteurs à courant continu ou aux moteurs à courant alternatif ?
Un servomoteur est-il un servomoteur? ......
Les sages ont dit un jour : Si la connaissance n'est pas systématique, quelle est la différence entre elle et un paragraphe ?
Mais le sage livre sur ce texte interminable, cette terminologie fantaisiste, cette explication plausible, regarde vraiment les gens dans les nuages.
J'ai également cherché longtemps sur Internet, je n'ai pas trouvé d'explication plus systématique de la structure des moteurs électriques et du principe de classification, ils ont donc pris beaucoup d'efforts pour interroger et organiser une copie.
Cet article tente d'expliquer les connaissances systématiques dans un langage simple et utilise beaucoup d'animations et d'images pour exprimer de manière vivante les connaissances obscures.
En raison de mes connaissances limitées, il est inévitable qu'il y ait de nombreuses erreurs, veuillez corriger les experts, n'hésitez pas à donner des conseils.
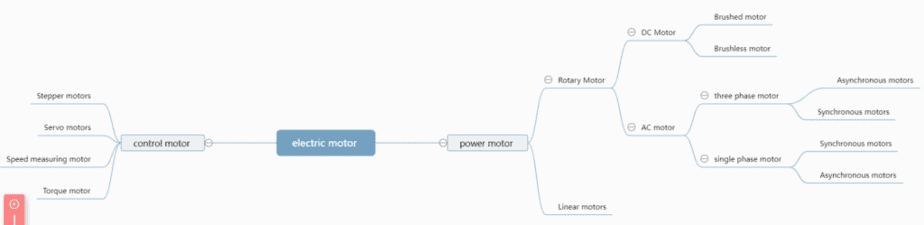
1. un schéma pour expliquer les types de moteurs électriques de base
2. Moteur électrique DC - moteur de brosse
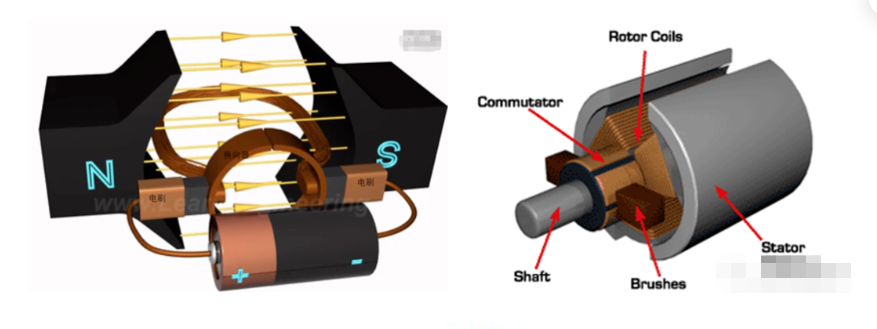
Lisez la physique de l'école secondaire de l'écume d'intimidateur, afin d'étudier le conducteur sous tension dans la force du champ magnétique de cette chose, nous avons entraîné la main gauche dans une paume cassée, ce qui est exactement le principe du moteur à induction à courant continu.
Tous les moteurs électriques sont composés de stator et de rotor, dans les moteurs électriques à courant continu, pour faire tourner le rotor, il faut constamment changer le sens du courant, sinon le rotor ne peut tourner que d'un demi-tour, c'est comme une pédale de vélo .
C'est pourquoi DC Motors a besoin de commutateurs.
D'une manière générale, les moteurs à courant continu à balais comprennent les moteurs à balais et les moteurs sans balais.
Le moteur à balais est également appelé moteur à induction à courant continu ou moteur à balais de charbon, souvent appelé moteur à courant continu à balais.
Il utilise la commutation mécanique, le pôle externe ne déplace pas la bobine interne (armature) en mouvement, le commutateur et la bobine du rotor tournent ensemble, les balais et les aimants ne bougent pas, de sorte que le commutateur et le frottement des balais complètent la commutation de direction du courant.
Inconvénients du moteur à balais.
1, commutation mécanique des étincelles générées par le collecteur et le frottement des balais, interférences électromagnétiques, bruit élevé, courte durée de vie.
2, mauvaise fiabilité, nombreuses pannes, nécessitant un entretien fréquent.
3, en raison de la présence de collecteur, limitant l'inertie du rotor, limitant la vitesse maximale, affectant les performances dynamiques.
Puisqu'il a tant de défauts, il est encore couramment utilisé, car il est à couple élevé, à structure simple et facile d'entretien (c'est-à-dire à changer les balais de charbon), bon marché.
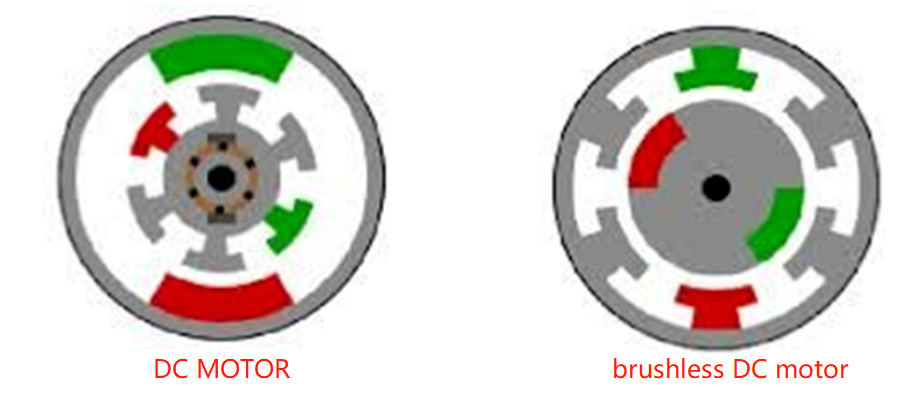
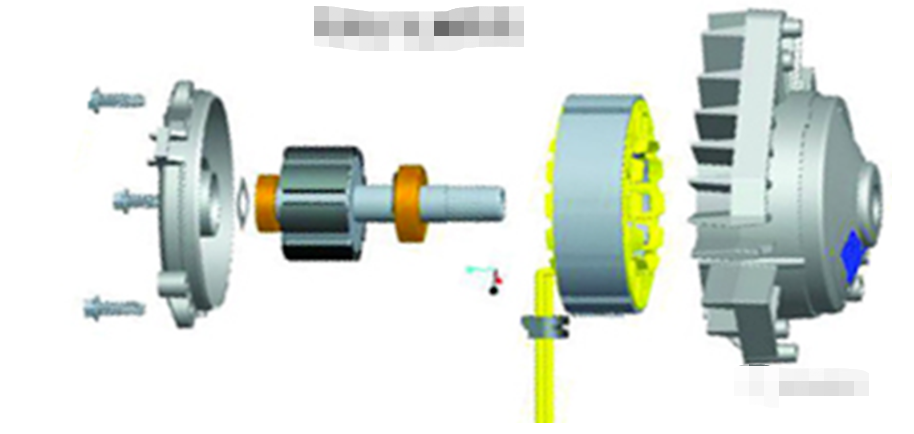
2. Motors DC - moteurs sans balais
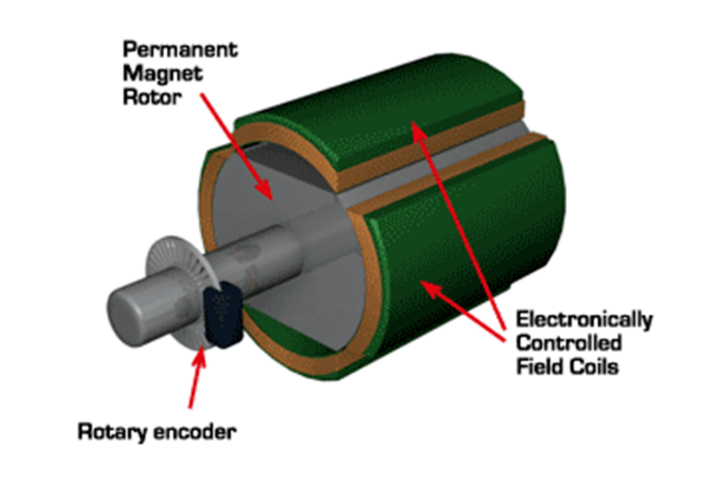
Le moteur sans balais est également appelé moteur à onduleur à courant continu (BLDC) dans certains domaines, il utilise une commutation électronique (capteur Hall), la bobine (armature) ne bouge pas les pôles magnétiques se déplacent, puis l'aimant permanent peut être à l'extérieur de la bobine ou à l'intérieur de la bobine , il y a donc un moteur sans balais à rotor externe et un moteur sans balais à rotor interne
Les moteurs sans balais sont construits de la même manière que les moteurs synchrones à aimants permanents.
Cependant, un seul moteur sans balais n'est pas un système d'alimentation complet. Le brushless doit essentiellement être contrôlé par un contrôleur brushless, également connu sous le nom d'ESC, pour obtenir un fonctionnement continu.
C'est le régulateur électronique sans balais (ESC) qui détermine vraiment ses performances.
Généralement, il existe deux types de courants d'entraînement pour les moteurs sans balais, l'un est une onde carrée et l'autre est une onde sinusoïdale.
Parfois, le premier est appelé moteur sans balais à courant continu et le second est appelé servomoteur à courant alternatif, qui est exactement une sorte de servomoteur à courant alternatif.
Les moteurs sans balais fonctionnent de différentes manières et peuvent être divisés en moteurs sans balais à rotor interne et en moteurs sans balais à rotor externe.
Le rotor interne est triphasé, ce qui est plus cher.
Le rotor extérieur est généralement utilisé en monophasé, le prix des personnes, la production de masse a été proche du moteur à balais de charbon, donc ces dernières années est largement utilisé.
Le prix du rotor externe triphasé est proche du prix du rotor interne.
Eh bien, comme vous pouvez le deviner, l'inconvénient des moteurs à balais est le point des moteurs sans balais.
Il a un rendement élevé, une faible consommation d'énergie, un faible bruit, une longue durée de vie, une grande fiabilité, un servocommande, une vitesse de conversion de fréquence en continu (jusqu'à une vitesse très élevée) et d'autres avantages.
Il est relativement plus petit que le moteur CC de la brosse, le contrôle que le moteur AC asynchrones est simple, le couple de départ est une grande capacité de surcharge, comme pour les inconvénients ... est plus cher que le pinceau, le mauvais entretien.
2. Motor DC - Principe de contrôle de la vitesse
Régulation de la vitesse du moteur à induction à courant continu : la régulation dite de la vitesse, c'est-à-dire en ajustant la vitesse du moteur pour obtenir le couple requis.
moteur à courant continu à aimant permanent en ajustant la tension, la résistance série, changer l'excitation peut être la vitesse, mais le réglage de la tension réelle est le plus pratique et le plus couramment utilisé, l'utilisation principale de la régulation de vitesse PWM.
PWM est en fait à travers le commutateur à grande vitesse pour obtenir une régulation de la tension continue, un cycle, ouvert longtemps, la tension moyenne est élevée, éteinte longtemps, la tension moyenne est faible, très pratique à régler, tant que le commutateur Vitesse Tant que la vitesse de commutation est suffisamment rapide, les harmoniques du réseau sont moindres et le courant est plus continu.
Cependant, les balais et le collecteur s'usent pendant longtemps, et en même temps, il y a un énorme changement de courant pendant la commutation, ce qui est très facile à produire des étincelles.
Le collecteur et les balais limitent la capacité et la vitesse du moteur à induction à courant continu, ce qui fait que la régulation de la vitesse du moteur à induction à courant continu rencontre un goulot d'étranglement.
Pour le moteur à induction CC sans balais, le contrôle de vitesse ne contrôle que la tension d'entrée sur la surface.
Mais le système de contrôle de fréquence de maîtrise de soi du moteur (moteur CC sans balais lui-même est livré avec un détecteur de position de rotor et un autre dispositif d'acquisition de signal de position de rotor, en utilisant le signal de position du rotor de ce dispositif pour contrôler le moment de changement de phase de fréquence de tension variable) contrôle automatiquement la fréquence selon la tension variable, ce qui est presque le même que le moteur CC (brossé), très convenable. Très pratique.
Parce que le rotor utilise des aimants permanents, pas d'enroulement d'excitation spécial, dans le cas de la même capacité, le moteur est plus petit, plus léger, plus efficace, plus compact, un fonctionnement plus fiable, de meilleures performances dynamiques, dans la conduite de véhicules électriques et d'autres aspects ont été largement utilisés.
3. Motors AC triphasés - moteurs asynchrones
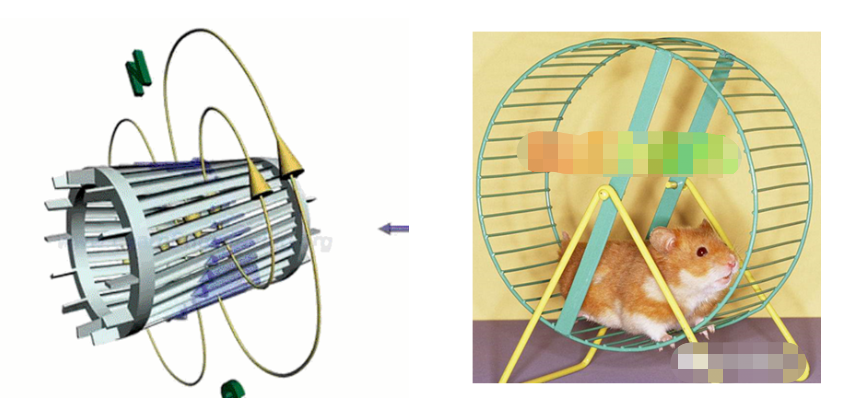
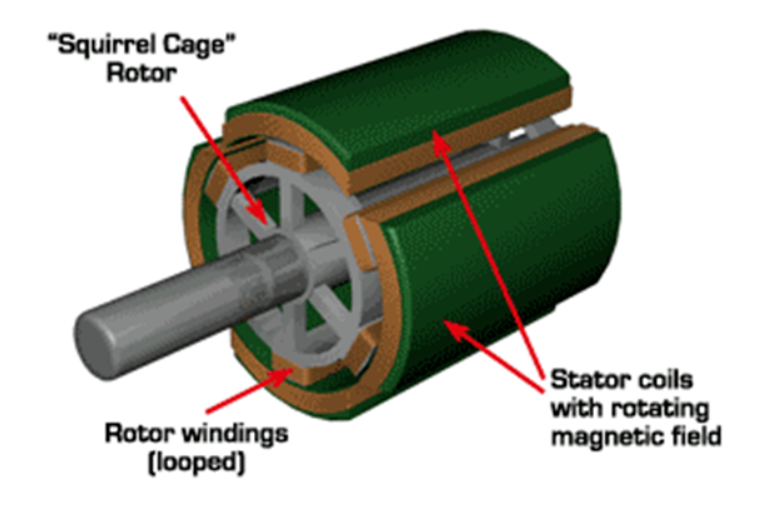
Les moteurs à courant alternatif sont divisés en moteurs synchrones et moteurs asynchrones, les moteurs synchrones sont principalement utilisés dans les générateurs et les moteurs asynchrones sont principalement utilisés dans les moteurs électriques. Ce sont des moteurs à induction à cage d'écureuil.
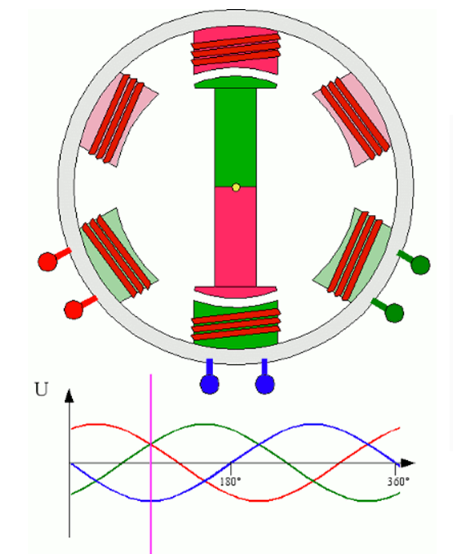
Le boîtier du moteur est le stator et il y a trois enroulements CA symétriques sur le stator.
Au fur et à mesure que la séquence des trois phases change, un champ magnétique synthétique rotatif se forme et la vitesse de rotation du champ magnétique est la vitesse synchrone.
La vitesse synchrone n=60f/p, f est la fréquence, p est le nombre de paires de pôles, par exemple, pour un moteur 2 pôles raccordé au réseau national 50Hz (c'est-à-dire que le nombre de paires de pôles est de 1 paire), alors la vitesse n=60*50/1=3000r/min.
De même, la vitesse synchrone des moteurs 4 pôles, 6 pôles et 8 pôles est de 1500, 1000 et 750.
Les moteurs asynchrones ont un mécanisme simple avec un rotor à bobine fermée, comme un type à cage d'écureuil.
La bobine du rotor coupera le champ magnétique tournant pour générer le potentiel électrique induit, qui à son tour génère le courant induit, et enfin le champ magnétique tournant.
Pour que le rotor devienne un électro-aimant et suive la rotation du champ magnétique du stator, la vitesse du rotor doit donc être < le champ magnétique tournant du stator, de manière à couper les lignes d'induction magnétique.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Autrement dit, la vitesse asynchrone du rotor <vitesse synchrone, il y a une différence de vitesse entre le champ magnétique du rotor et du stator, on l'appelle donc un moteur asynchrone.
La vitesse nominale du moteur asynchrone varie légèrement d'un fabricant à l'autre, environ 2800+r/min pour un moteur à 2 pôles, 1400+,950+,700+ pour un moteur asynchrone à 4, 6 et 8 pôles.
La vitesse du moteur asynchrone est élevée lorsqu'il n'y a pas de charge et diminue lorsqu'il y a une charge.
Le moteur asynchrone a une structure simple, un entretien facile, un fonctionnement fiable et un prix bon marché, il est donc largement utilisé.
4. Motors AC triphasés - moteurs synchrones
Moteur synchrone.
Si vous laissez la vitesse du rotor = vitesse de rotation du champ magnétique du stator, il devient un moteur synchrone, à ce moment, il est nécessaire de transformer le stator en électroaimant ou en aimant permanent, c'est-à-dire pour alimenter le stator, à ce moment plus besoin pour couper la ligne d'induction magnétique peut tourner, la vitesse de rotation et la vitesse de rotation du champ magnétique sont les mêmes, c'est-à-dire la formation d'un moteur synchrone.
La structure du rotor du moteur synchrone est plus complexe que les moteurs asynchrones, les prix élevés, la durée de vie de la production n'est pas aussi largement utilisée que les moteurs asynchrones, principalement utilisés comme générateurs, maintenant les centrales thermiques, les centrales hydroélectriques, les turbines à vapeur, les turbines hydrauliques sont essentiellement des moteurs synchrones.
5. Moteur AC triphasé - Régulation de vitesse des moteurs électriques asynchrones
Régulation de la vitesse du moteur asynchrone: théoriquement, la fréquence, la tension ou la résistance du rotor du contrôle du moteur asynchrone, la distribution des pôles du moteur peut être une régulation de la vitesse, mais en pratique, pour obtenir une régulation de la vitesse infinie avec la méthode de réglage de la fréquence et de la tension à atteindre.
En raison de la plage de vitesse de régulation de tension n'est pas grande, ne peut généralement être utilisé que dans les exigences de contrôle de vitesse ne sont pas des occasions élevées, l'application n'est pas répandue.
Régulation de vitesse à fréquence variable : En parlant de fréquence, nous en avons peut-être entendu parler.
Le nom complet de la conversion de fréquence est Variable Voltage Variable Frequency (VVVF), ce qui signifie que la tension est modifiée lorsque la fréquence est modifiée, de sorte que la plage de vitesse du moteur asynchrone est suffisamment grande.
Les convertisseurs de fréquence peuvent être divisés en deux grandes catégories : les convertisseurs de fréquence AC-AC et les convertisseurs de fréquence AC-DC.
Onduleur AC-DC : Le courant alternatif est directement transformé en courant alternatif d'une autre fréquence par l'électronique de puissance.
La fréquence de sortie maximale ne peut pas dépasser la moitié de la fréquence d'entrée, elle n'est donc généralement utilisée que dans les systèmes à faible vitesse et haute capacité, et peut éliminer le besoin d'un énorme réducteur de vitesse.
L'onduleur AC-DC rectifiera d'abord le courant alternatif en courant continu, puis le transformera en courant alternatif avec une fréquence et une tension contrôlables via l'onduleur, avec la technologie PWM, ce type d'onduleur peut réaliser une large gamme de tension et de fréquence variables.
Pour les véhicules électriques, le moteur asynchrone est durable, a une forte capacité de surcharge et l'algorithme de contrôle est si mature qu'il peut être utilisé complètement.
6. Moteur à courant alternatif triphasé - Régulation de vitesse du moteur synchrone
Régulation de la vitesse du moteur synchrone :
Les machines synchrones n'ont pas de taux de réduction et la tension de commande ne peut pas modifier la vitesse lorsque la structure est déterminée. Ainsi, avant l'apparition des convertisseurs de fréquence, les moteurs synchrones n'étaient absolument pas régulés.
L'apparition du convertisseur de fréquence fait que le moteur synchrone à courant alternatif a également une plage de régulation de vitesse énorme, car son rotor a également une excitation indépendante (aimant permanent ou excitation électrique), sa plage de régulation de vitesse est plus large que celle du moteur asynchrone, et le moteur synchrone a donné une nouvelle vie.
Le système de contrôle de vitesse à fréquence variable à tension variable de moteur synchrone peut être divisé en un contrôle de vitesse variable contrôlé par d'autres et un contrôle de vitesse variable auto-contrôlé.
Pour la régulation de la vitesse à fréquence variable contrôlée par d'autres, elle est similaire à la régulation à fréquence variable du moteur asynchrone, qui peut être contrôlée par SVPWM et d'autres méthodes de contrôle selon son modèle mathématique, et ses performances sont meilleures que celles du moteur asynchrone à courant alternatif ordinaire.
Le moteur synchrone à onduleur auto-contrôlé portait autrefois divers noms dans le processus de développement, tels que moteur sans collecteur; lors de l'utilisation d'aimants permanents et de l'entrée d'une onde sinusoïdale triphasée, il peut être appelé moteur synchrone à aimant permanent à onde sinusoïdale; et si vous entrez une onde carrée, alors il peut être appelé moteur synchrone à aimant permanent à onde trapézoïdale, oui, il est similaire à la machine à courant continu sans balais (BLDM) précédemment mentionnée, nous ne sentons pas qu'un grand cercle de rap a tourné Retour, mais vous doit maintenant avoir une compréhension plus approfondie de la vitesse variable, donc du moteur à courant continu sans balais lors de l'utilisation de l'entrée CC, mais l'utilisation de la technologie de conversion de fréquence du moteur synchrone (la même structure que le moteur synchrone à aimant permanent), dans le modèle 3 sur l'utilisation du moteur sans balais à courant continu .
7. Motor asynchrone AC monophasé - moteur excité par les séries AC monophasé (brosse)
Moteur monophasé AC à excitation en série, communément appelé moteur à excitation en série ou moteur universel (nom étranger UniversalMotor, nommé en raison de l'universel AC et DC), l'enroulement d'induit et l'enroulement d'excitation sont connectés en série pour fonctionner ensemble.
Le moteur à excitation en série monophasé est également appelé moteur à excitation en série à double usage AC-DC, qui peut fonctionner avec une alimentation en courant alternatif ou en courant continu.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Les avantages du moteur monophasé à excitation série sont qu'il a une vitesse élevée, un couple de démarrage élevé, une petite taille, un poids léger, pas facile à bloquer la rotation, une large plage de tension applicable et peut être régulé en vitesse par la méthode de régulation de tension , ce qui est simple et facile à réaliser.
Par conséquent, il est largement utilisé dans les outils électriques, tels que les meuleuses d'angle, les perceuses à main, etc.
La structure du moteur à excitation en série monophasé est très similaire à celle du moteur à excitation en série à courant continu, la principale différence est que le noyau du stator du moteur à excitation en série monophasé doit être en acier au silicium laminé, tandis que les pôles magnétiques de DC peut être constitué à la fois d'une structure laminée et intégrale.
La régulation de la vitesse du moteur monophasé excité en série, la plupart des méthodes utilisées pour régler la tension, consiste à modifier le potentiel électrique.
La méthode de régulation de tension du moteur monophasé excité en série utilise une régulation de tension à déphasage contrôlé, qui utilise la tension de déclenchement du SCR pour retarder la tension d'entrée afin d'obtenir le déclenchement à déphasage de la tension d'entrée.
Il existe des méthodes matérielles et logicielles dans la mise en œuvre.
La méthode de tension régulée, utilisant la technologie de contrôle de vitesse contrôlée au silicium, a une ligne simple, une petite taille de composants et d'autres caractéristiques d'une méthode simple et efficace contrôlée au silicium
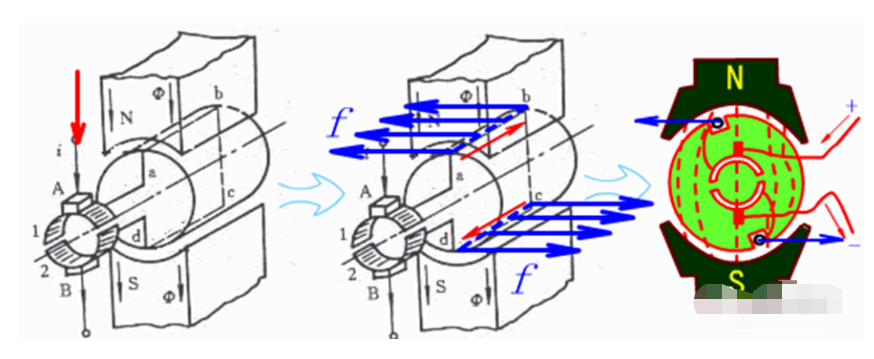
(a) Courbe de variation du courant alternatif ;
(b) Sens de rotation du rotor lorsque le courant est une demi-onde positive
(c) Sens de rotation du rotor lorsque le courant est une demi-onde négative
8. Moteur asynchrone AC monophasé - moteur à cage Squirrel AC monophasé (sans pinceau)
Le courant monophasé à travers l'enroulement d'induit produit un champ magnétique pulsé plutôt qu'un champ magnétique rotatif, de sorte que les moteurs asynchrones monophasés ne peuvent pas être auto-démarrés.
Pour résoudre le problème de démarrage, les moteurs asynchrones alimentés en courant alternatif monophasé sont souvent en fait conçus pour être biphasés.
L'enroulement principal est alimenté directement par l'alimentation monophasée ; l'enroulement secondaire est spatialement différent de l'enroulement principal de 90° (angle électrique, égal à l'angle mécanique divisé par le nombre de paires de pôles du moteur).
L'enroulement secondaire est connecté à une alimentation en courant alternatif monophasé après la connexion en série d'un condensateur ou d'une résistance, de sorte que le courant qui le traverse et le courant dans l'enroulement principal aient une certaine différence de phase.
Cela fait du champ magnétique synthétique un champ tournant elliptique, ou peut-être même proche d'un champ tournant circulaire.
Le moteur obtient ainsi un couple de démarrage.
Le moteur utilisant la méthode de séparation de phase de résistance est peu coûteux, par exemple, l'enroulement secondaire peut être enroulé avec un fil plus fin, mais l'effet de séparation de phase est faible et l'énergie est consommée dans la résistance.
Une fois que le moteur a démarré et atteint une certaine vitesse, l'enroulement secondaire est généralement supprimé automatiquement par un interrupteur centrifuge monté sur l'arbre du moteur pour réduire les pertes résistives et améliorer l'efficacité de fonctionnement.
Il est généralement utilisé pour les occasions où le couple de démarrage requis n'est pas élevé, comme un petit tour, un petit réfrigérateur, etc. L'inconvénient est que la vitesse ne peut pas être ajustée.
Il est possible de rendre le champ magnétique synthétique du moteur proche du champ magnétique tournant circulaire à un certain point de fonctionnement du moteur, de manière à obtenir de meilleures caractéristiques de fonctionnement.
Afin que le moteur asynchrone à phase divisée obtienne de meilleures performances de démarrage ou de meilleures caractéristiques de fonctionnement ou les deux, la capacité (quantité de valeur) requise est différente et peut être divisée en trois types
9. Motors pas à pas - moteurs pas à pas en boucle ouverte
Les moteurs pas à pas (en boucle ouverte) sont des moteurs contrôlés en boucle ouverte qui convertissent les signaux d'impulsions électriques en déplacements angulaires et sont extrêmement largement utilisés.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Le nombre d'impulsions peut être contrôlé pour contrôler la quantité de déplacement angulaire, de manière à atteindre l'objectif d'un positionnement précis ; en même temps, la fréquence d'impulsion peut être contrôlée pour contrôler la vitesse et l'accélération de la rotation du moteur, afin d'atteindre l'objectif de régulation de la vitesse.
Le moteur pas à pas est une sorte de moteur à induction, qui fonctionne en utilisant un circuit électronique, c'est-à-dire un pilote, pour transformer l'alimentation CC en un courant de commande de synchronisation multiphase alimenté en temps partagé.
Bien que les moteurs pas à pas soient alimentés en courant continu, ils ne peuvent pas être compris comme des moteurs à courant continu, qui sont des moteurs de puissance qui convertissent l'énergie électrique continue en énergie mécanique, tandis que les moteurs pas à pas sont des moteurs de commande en boucle ouverte qui convertissent les signaux d'impulsions électriques en déplacement angulaire.
10. Moteur pas à pas - Comparaison du servo-fonte
Notez que les moteurs pas à pas sont utilisés dans les applications à basse vitesse - pas plus de 1000r / min par minute, la meilleure plage de travail est de 150 à 500r / min (passant en boucle fermée jusqu'à 1500).
Le moteur pas à pas biphasé à 60 ~ 70 tr/min est sujet au phénomène de résonance à basse vitesse, générant des vibrations et du bruit, qui doivent être évités en modifiant le rapport de réduction, en augmentant la fraction fine, en ajoutant des amortisseurs magnétiques, etc.
Précautions de précision de subdivision, lorsque le niveau de subdivision est supérieur à 4, la précision de l'angle de pas ne peut pas être garantie, exigences de haute précision, il est préférable de passer à plusieurs phases (c'est-à-dire un angle de pas plus petit) du moteur pas à pas ou fermé- boucle pas à pas, servomoteur.
Moteur pas à pas (boucle ouverte) et servomoteur 7 différents.
Une précision de contrôle - La précision de contrôle du servomoteur peut être définie en fonction de l'encodeur, une précision plus élevée.
B Caractéristiques à basse fréquence - Les moteurs pas à pas sont sujets à des vibrations à basse fréquence, les servomoteurs non.
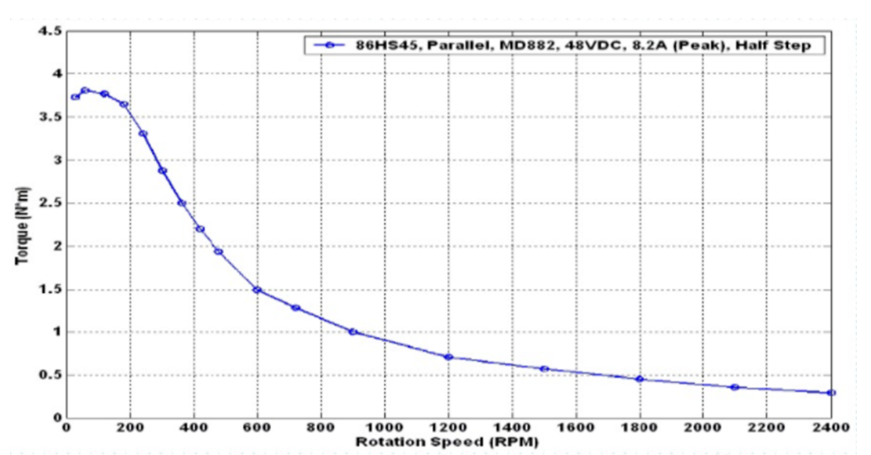
C Caractéristiques de fréquence du moment - Le couple du moteur pas à pas devient plus petit avec l'augmentation de la vitesse, donc sa vitesse de fonctionnement maximale est généralement en <1000r/min, le servomoteur à la vitesse nominale (généralement 3000r/min) peut produire le couple nominal, à la vitesse nominale au-dessus de la puissance de sortie constante, la vitesse maximale jusqu'à 5000 tr/min ;.
D Capacité de surcharge - Le moteur pas à pas ne peut pas être surchargé, le couple maximal du moteur servo peut être surchargé 3 fois.
E Performances de fonctionnement - Moteur pas à pas pour le contrôle de la boucle ouverte, servomoteur lors du contrôle de boucle fermée.
F Réponse de vitesse - Temps de démarrage du moteur pas à pas 0,15 à 0,5 s, servomoteur 0,05 ~ 0,1, le plus rapide 0,01 s pour atteindre le 3000r / min.
G Indicateurs d'efficacité - Efficacité du moteur pas à pas d'environ 60%, servomoteur d'environ 80%.
Dans l'utilisation réelle, on trouvera: le servomoteur cher, cher parmi tant d'autres, donc les moteurs synchrones sont plus largement utilisés, en particulier dans les exigences de précision de positionnement ne sont pas très élevées entraînement par courroie synchrone, convoyeur à bande plate et d'autres occasions utilisent souvent un moteur pas à pas.
11. Motors pas à pas - moteurs pas à pas en boucle fermée
Moteurs pas à pas en boucle fermée : En plus des moteurs pas à pas en boucle ouverte, il existe des moteurs pas à pas qui ont un encodeur ajouté à l'extrémité du moteur, permettant un contrôle en boucle fermée.
Le contrôle en boucle fermée des moteurs pas à pas utilise le retour de position et/ou le retour de vitesse pour déterminer les transitions de phase appropriées à la position du rotor, ce qui peut grandement améliorer les performances des moteurs pas à pas.
Systèmes servo sans phénomènes de décalage.
Avantages des moteurs pas à pas en boucle fermée.
1. Réponse à grande vitesse. Comparé aux moteurs adaptés, le moteur pas à pas en boucle fermée suit très fortement les commandes de positionnement, de sorte que le temps de positionnement est très court. Dans l'application de démarrages/arrêts fréquents, le temps de positionnement peut être considérablement raccourci.
2. Générez plus de couple qu'un servo ordinaire. Compenser le manque de perte de pas et les vibrations à basse vitesse du système pas à pas ordinaire.
3. Un couple élevé peut être généré même sous une charge de 100%, sans perte de fonctionnement pas à pas, sans tenir compte de la perte de couple et d'autres problèmes comme les systèmes pas à pas ordinaires.
4. En appliquant l'entraînement en boucle fermée, l'efficacité peut être augmentée à 7,8 fois, la puissance de sortie peut être augmentée à 3,3 fois et la vitesse peut être augmentée à 3,6 fois.
Il peut obtenir une vitesse de fonctionnement plus élevée, une vitesse plus stable et plus fluide que le contrôle en boucle ouverte.
5. Le moteur pas à pas sera complètement stationnaire lorsqu'il s'arrêtera, sans le phénomène de micro-vibration d'un servo ordinaire.
Il peut remplacer l'application d'un système d'asservissement à usage général lorsqu'un positionnement à faible coût et de haute précision est requis.
12. Moteur pas à pas - Comparaison du servo en boucle fermée pas
Les moteurs pas à pas en boucle fermée ajustent automatiquement la taille du courant d'enroulement en fonction de la taille de la charge, la chaleur et les vibrations sont inférieures au pas à pas en boucle ouverte, il y a un retour d'encodeur de sorte que la précision est supérieure à celle des moteurs pas à pas ordinaires, la réponse du moteur qu'en boucle ouverte pas à pas plus lent que les servomoteurs plus rapides, il y a une erreur de position pendant le fonctionnement, l'erreur diminuera progressivement en millisecondes après l'arrêt de la commande.
Couple à grande vitesse que pas à pas en boucle ouverte, applications courantes dans l'occasion 0-1500 tr/min.
En résumé: moteur pas à pas en boucle fermée à faible coût, haute efficacité, pas de gigue, pas de micro-vibration d'arrêt, haute rigidité, pas de rectification, haute vitesse, réponse dynamique élevée, etc., remplace les systèmes d'asservissement à coût élevé, systèmes pas à pas bas de gamme en boucle ouverte et autres solutions économiques
13. Servomoteur - servomoteur général
Le servomoteur (servomoteur), également appelé moteur d'actionneur, peut rendre la vitesse de contrôle, la précision de position très précise, peut convertir le signal de tension en couple et en vitesse pour entraîner l'objet de contrôle.
Contrairement à la structure principale du moteur pas à pas, le servomoteur est un moteur à courant continu standard ou un moteur à induction à courant alternatif car le circuit de commande est placé à l'extérieur du moteur et la partie moteur à l'intérieur.
Le servomoteur utilise des impulsions pour le positionnement. Lorsque le servomoteur reçoit 1 impulsion, il tourne d'un angle correspondant à 1 impulsion.
Chaque fois que le moteur tourne d'un angle, l'encodeur envoie le nombre correspondant d'impulsions de retour. Les impulsions de rétroaction et les impulsions reçues par le servomoteur forment une commande en boucle fermée, de sorte que le servomoteur peut contrôler très précisément la rotation du moteur pour obtenir un positionnement précis.
Contrôle des servomoteurs : généralement, les servomoteurs à usage industriel sont contrôlés par trois boucles, à savoir la boucle de courant, la boucle de vitesse et la boucle de position, qui peuvent renvoyer respectivement l'accélération angulaire, la vitesse angulaire et la position de rotation du moteur.
La puce contrôle le courant d'entraînement de chaque phase du moteur grâce à la rétroaction des trois, de sorte que la vitesse et la position du moteur peuvent fonctionner avec précision comme prévu.
Le servo AC a la caractéristique d'un couple constant sous la vitesse nominale, la vitesse nominale du servo AC à inertie faible et moyenne commune de 200 W, 400 W est de 3000 tr/min, la vitesse la plus élevée est de 5000 tr/min, haute vitesse.
Le couple est proportionnel au courant, il peut donc fonctionner en mode couple, comme les vis de verrouillage, les bornes de pression et d'autres occasions qui nécessitent un couple constant.
Le bruit et les vibrations du servomoteur AC sont très faibles et génèrent peu de chaleur.
Le même volume d'inertie du rotor du moteur est petit, l'inertie du servo de 400 W n'est équivalente qu'à l'inertie du rotor du moteur pas à pas de 57 bases de 2 NM.
Le servo a une capacité de surcharge de courte durée, la sélection doit tenir compte du multiplicateur de surcharge du moteur lors de l'accélération et de la décélération.
Le servo utilise un contrôle en boucle fermée et a la même erreur de suivi de position qu'un moteur pas à pas en boucle fermée.
Le servo nécessite une mise en service avant utilisation.
Le couple d'origine du moteur pas à pas et du servomoteur n'est pas suffisant, il faut souvent travailler avec le réducteur, vous pouvez utiliser le réducteur ou le réducteur planétaire.
6. Servomoteur - Servo
Servo est une classe de servomoteurs à courant continu, d'abord utilisé pour les petits modèles d'avion et maintenant utilisé pour les petites articulations de robot.
D'après l'analyse structurelle, un servo consiste en un petit moteur à courant continu, ainsi que des capteurs, des puces de commande et des ensembles de réducteurs, qui sont montés dans un boîtier intégré.
Il est capable de contrôler l'angle de rotation via un signal d'entrée (généralement un signal PWM, mais également un signal numérique).
Puisqu'il s'agit d'une version simplifiée, la commande originale à trois boucles du servomoteur est simplifiée à une boucle, c'est-à-dire que seule la boucle de position est détectée.
Une solution bon marché est un potentiomètre, qui est détecté par une résistance, tandis qu'une solution avancée utilisera un capteur Hall ou un encodeur.
Les servos généraux sont peu coûteux et compacts, mais ont une précision très faible et une capacité de stabilisation de position médiocre, et peuvent répondre à de nombreux besoins bas de gamme.
Avec le boom des petits robots grand public au cours des deux dernières années, les servomoteurs petits et légers sont devenus instantanément les composants d'articulation les plus appropriés.
Cependant, les articulations des robots nécessitent des performances beaucoup plus élevées que les servos aériens, et en tant que produit commercial, elles nécessitent également des servos de bien meilleure qualité que les lecteurs de bricolage.
Bienvenue à partager avec nous plus d'informations sur les moteurs électriques dans la zone des commentaires !
Toute demande de renseignements sur le moteur électrique, veuillez contacter le moteur électrique professionnel fabricant dans Chine comme suit:
Dongchun motor propose une large gamme de moteurs électriques utilisés dans diverses industries telles que les transports, les infrastructures et la construction.
 Aller au contenu
Aller au contenu