El motor eléctrico es un dispositivo que convierte la energía eléctrica en energía mecánica a través de la acción electromagnética.
Por la forma de energía eléctrica, los motores se pueden dividir en dos categorías: motores de CA y motores de CC.
Entre ellos, los motores de CA se pueden dividir en motores de CA monofásicos y motores de CA trifásicos. Según la diferencia en la velocidad de rotación, según el principio de clasificación, el motor también se puede dividir en motores síncronos y motores asíncronos.
Los motores síncronos se pueden dividir en motores síncronos de imanes permanentes, motores síncronos de histéresis y motores síncronos de reluctancia según los diferentes campos magnéticos.
Los motores asíncronos, por otro lado, no solo están disponibles en forma de inducción, sino también en forma de conmutador de CA.
La forma de inducción se puede dividir en motores asíncronos trifásicos y motores asíncronos de polo sombreado. Además, según el tipo de protección, el motor también se puede dividir en motores cerrados, abiertos, estancos, sumergibles, estancos y antideflagrantes.
El motor eléctrico es una parte importante del sistema de transmisión y control, que es un dispositivo electromagnético para realizar la conversión o transmisión de energía eléctrica de acuerdo con la ley de inducción electromagnética, el papel principal es generar par motor, como fuente de energía eléctrica. electrodomésticos o maquinaria diversa, y convertir la energía eléctrica en energía mecánica.
Con el desarrollo de la ciencia y la tecnología modernas, el enfoque de los motores en las aplicaciones prácticas ha comenzado a cambiar de una simple transmisión en el pasado a un control complejo, especialmente para el control preciso de la velocidad, la posición y el par del motor.
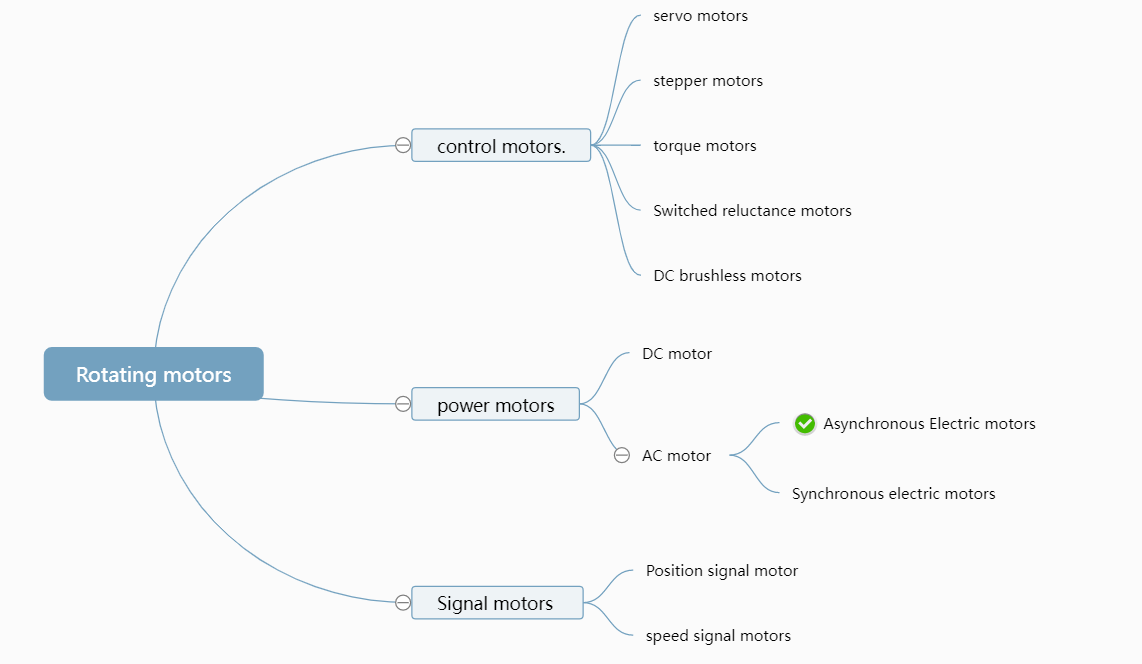
However, motors will have different designs and drive methods according to different applications. According to the uses of rotating motors, the following basic classification is made, and we mainly introduce the most representative, common and basic motors in motors - control motors, power motors and signal motors.
Control motors are mainly used for precise speed and position control, and as "actuators" in control systems. They can be divided into servo motors, stepper motors, torque motors, switched reluctance motors, brushless DC motors and other categories.
Servomotores
El servomotor más antiguo es un motor de CC general, y solo cuando la precisión del control no es alta, el motor de CC general se utiliza como servomotor. El servomotor de CC actual es un motor de CC de pequeña potencia en términos de estructura, y su excitación adopta principalmente control de armadura y control de campo magnético, pero generalmente adopta control de armadura.
Los servomotores se utilizan ampliamente en varios sistemas de control, principalmente en varios sistemas de control de movimiento, especialmente en sistemas de seguimiento. Puede convertir la señal de voltaje de entrada en la salida mecánica en el eje del motor y arrastrar el elemento controlado para lograr el propósito de control. En general, el servomotor requiere que la velocidad del motor sea controlada por la señal de voltaje adicional, la velocidad puede cambiar continuamente con el cambio de la señal de voltaje adicional, el par puede controlarse mediante la salida de corriente del controlador y el motor debe reflejarse rápido, ser de tamaño pequeño y tener un poder de control pequeño.
Motor paso a paso
El llamado motor paso a paso es un actuador que convierte pulsos eléctricos en desplazamiento angular. Es decir, cuando el controlador paso a paso recibe una señal de pulso, hace que el motor paso a paso gire un ángulo fijo en la dirección establecida.
Podemos controlar el desplazamiento angular del motor controlando el número de pulsos, para lograr el propósito de un posicionamiento preciso.
Al mismo tiempo, también podemos controlar la velocidad y la aceleración de la rotación del motor mediante el control de la frecuencia del pulso, para lograr el propósito de la regulación de la velocidad. En la actualidad, los motores paso a paso más utilizados incluyen motores paso a paso reactivos (VR), motores paso a paso de imanes permanentes (PM), motores paso a paso híbridos (HB) y motores paso a paso monofásicos.
La diferencia entre los motores paso a paso y los motores ordinarios radica principalmente en su forma impulsada por pulsos, por lo que los motores paso a paso se pueden combinar con la tecnología de control digital moderna y tienen las características de estructura simple, alta confiabilidad y bajo costo.
Pero los motores paso a paso en la precisión de control, el rango de cambio de velocidad, el rendimiento a baja velocidad son inferiores al control tradicional de circuito cerrado de los servomotores de CC, por lo que los motores paso a paso se utilizan ampliamente en las prácticas de producción y otros requisitos de precisión no son particularmente altos en varios campos. , especialmente en el campo de la fabricación de máquinas herramienta CNC.
Y los motores paso a paso no necesitan conversión A/D, pueden convertir directamente la señal de pulso digital en desplazamiento angular, por lo que se ha considerado el actuador de máquina herramienta CNC más ideal.
Además de su aplicación en máquinas herramienta CNC, los motores paso a paso también se pueden utilizar en otras máquinas, como motores en alimentadores automáticos, motores en unidades de disquete de uso general y también en impresoras y trazadores.
In addition, the stepper motor also has many defects. Because of the stepper motor's no-load start frequency, so the stepper motor can run normally at a low speed, but if higher than a certain speed can not start, and accompanied by a sharp whistling sound. Different manufacturers of subdivision drive accuracy may vary greatly, the greater the subdivision accuracy is more difficult to control. And, stepper motor low-speed rotation has a large vibration and noise.
motor de torsión
El denominado motor de torsión es un motor de CC de imanes permanentes multipolares de tipo plano.
Su armadura tiene un mayor número de ranuras, placas de conmutación y conductores en serie para reducir la pulsación de par y la pulsación de velocidad. Hay dos tipos de motores de torsión, motores de torsión de CC y motores de torsión de CA.
Entre ellos, el motor de torsión de CC tiene una pequeña reactancia autoinducida, por lo que la respuesta es buena. Su par de salida es proporcional a la corriente de entrada, independiente de la velocidad y posición del rotor. Puede funcionar a baja velocidad conectado directamente a la carga sin reducción de engranajes en un estado casi bloqueado, por lo que puede producir una relación de par a inercia alta en el eje de la carga y eliminar el error sistemático debido al uso de engranajes de reducción.
Los motores de torque de CA se pueden subdividir en síncronos y asíncronos, y la corriente que se usa comúnmente es el motor de torque asíncrono de jaula de ardilla, que tiene las características de baja velocidad y gran torque. En general, los motores de par de CA se utilizan a menudo en la industria textil. Su principio de funcionamiento y estructura son los mismos que los de los motores asíncronos monofásicos, pero sus características mecánicas son más suaves debido a la mayor resistencia del rotor de jaula de ardilla.
Motor de reluctancia de conmutación
El motor de reluctancia conmutada es un nuevo tipo de motor de control de velocidad, estructura extremadamente simple y robusta, bajo costo, excelente rendimiento de control de velocidad, es un fuerte competidor del motor de control tradicional, tiene un fuerte potencial de mercado.
Sin embargo, también hay problemas como la pulsación del par, el ruido de funcionamiento y la vibración, que necesitan algún tiempo para optimizarse y mejorarse para adaptarse a la aplicación real del mercado.
Motor CC sin escobillas
Brushless DC motor (BLDCM) is developed on the basis of brushed DC motor, but its drive current is uncompromisingly AC. Brushless DC motors can be further divided into brushless rate motors and brushless torque motors. Generally, brushless motors have two types of drive currents, one is a trapezoidal wave (usually a "square wave") and the other is a sine wave. Sometimes the former is called a brushless DC motor and the latter is called an AC servo motor, which is also a kind of AC servo motor to be exact.
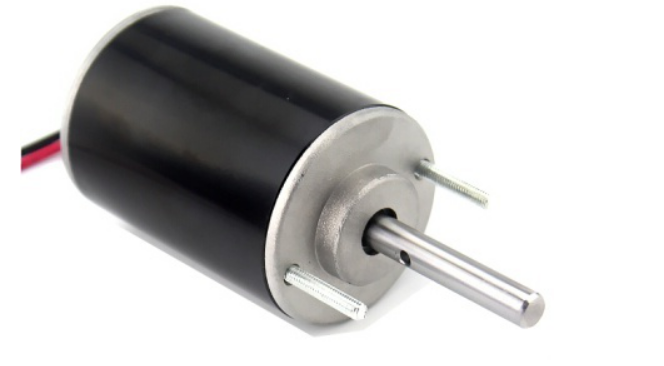
Brushless DC motors usually have a "slender" structure in order to reduce rotational inertia. Brushless DC motors are much smaller in weight and volume than brushed DC motors, and the corresponding rotational inertia can be reduced by about 40%-50%. Due to the processing problems of permanent magnet materials, the capacity of brushless DC motors is generally below 100kW.
Las características mecánicas y de regulación de este motor tienen buena linealidad, amplio rango de velocidades, larga vida, fácil mantenimiento y bajo nivel de ruido, y no presenta una serie de problemas causados por escobillas, por lo que este motor tiene un gran potencial de aplicación en sistemas de control.
Brushless DC motors are usually of "slender" construction to reduce the inertia.
Los motores de CC sin escobillas son mucho más pequeños en peso y volumen que los motores de CC con escobillas, y la inercia rotacional correspondiente se puede reducir entre un 40 % y un 50 %. Debido a los problemas de procesamiento de los materiales de imanes permanentes, la capacidad de los motores de CC sin escobillas generalmente es inferior a 100 kW.
Las características mecánicas y de regulación de este motor tienen buena linealidad, amplio rango de velocidades, larga vida, fácil mantenimiento y bajo nivel de ruido, y no presenta una serie de problemas causados por escobillas, por lo que este motor tiene un gran potencial de aplicación en sistemas de control.
motor de potencia
El motor de potencia se divide en motor de CC y motor de CA, y el motor de CA se divide principalmente en motor síncrono y motor asíncrono.
motor de corriente continua
El motor de CC es el motor más antiguo, de finales del siglo XIX, que se puede dividir aproximadamente en dos categorías con conmutador y sin conmutador.
El motor de CC tiene mejores características de control, aunque en estructura, precio y mantenimiento no son tan buenos como los motores de CA.
Pero debido a que el problema de control de velocidad del motor de CA no se ha resuelto bien, y el motor de CC tiene las ventajas de un buen rendimiento de control de velocidad, fácil de arrancar, capaz de cargar el arranque,
por lo tanto, la aplicación del motor de CC sigue siendo muy amplia, especialmente después de la aparición de la fuente de alimentación de CC controlada por silicio.
Estado de la aplicación: en la vida, existen innumerables aplicaciones de productos eléctricos, como ventiladores, maquinillas de afeitar, puertas automáticas en hoteles, cerraduras automáticas de puertas, cortinas automáticas, etc., todos usan motores de CC.
Los motores de CC también se utilizan ampliamente en la tracción de locomotoras, como motores de tracción de CC para locomotoras de ferrocarril, motores de tracción de CC para locomotoras de metro, motores auxiliares de CC para locomotoras, motores de tracción de CC para locomotoras de minería, motores de CC para barcos, etc.
También se utilizan ampliamente en aviones, tanques, radares y otras armas y equipos. La imagen muestra el motor de CC de la serie Z4.
Motor AC
Motor sincrónico
El llamado motor síncrono es un motor eléctrico accionado por corriente alterna, el campo magnético giratorio del rotor y el estator funcionan de forma síncrona.
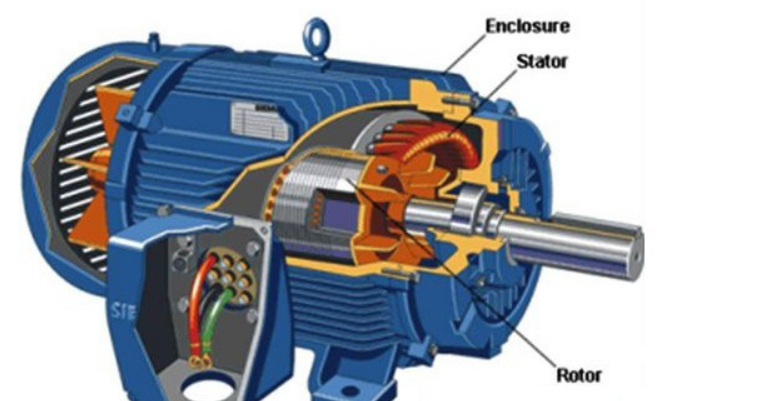
The stator of synchronous motor is exactly the same as that of asynchronous motor, but there are two types of rotor: "convex pole" and "hidden pole".
El motor síncrono de rotor convexo es simple y fácil de fabricar, pero la resistencia mecánica es baja y es adecuado para operación a baja velocidad.
El motor síncrono de polos ocultos tiene un proceso de fabricación complicado, pero tiene una alta resistencia mecánica y es adecuado para una operación de alta velocidad.
The working characteristic of synchronous motor is the same as all motors, which is "reversible", that is, it can run in generator mode and motor mode.
Estado de la aplicación: los motores síncronos se utilizan principalmente en máquinas grandes, como sopladores, bombas, molinos de bolas, compresores, trenes de laminación de acero, instrumentos y equipos pequeños y en miniatura, o como elementos de control, de los cuales los motores síncronos trifásicos son el cuerpo principal. .
Además, también se puede utilizar como regulador para entregar potencia reactiva inductiva o capacitiva a la red.
Motor asincrónico
El motor asíncrono es un tipo de motor de CA basado en la interacción del campo magnético giratorio del espacio de aire y la corriente de inducción del devanado del rotor para producir un par electromagnético y realizar la conversión de energía.
El motor asíncrono es generalmente una serie de productos con una amplia gama de especificaciones, y es el más utilizado y el más demandado entre todos los motores.
En la actualidad, alrededor del 90% de la maquinaria en la transmisión de energía utiliza un motor asíncrono de CA, por lo que su consumo de electricidad representa más de la mitad de la carga eléctrica total.
Asynchronous motor has the advantages of simple structure, easy manufacturing, use and maintenance, reliable operation as well as smaller mass and lower cost.
Moreover, asynchronous motor has high operating efficiency and good working characteristics, from no-load to full-load range close to constant speed operation, can meet the transmission requirements of most industrial and agricultural production machinery.
Los motores asíncronos se utilizan ampliamente para impulsar máquinas herramienta, bombas, sopladores, compresores, equipos de elevación y bobinado, maquinaria de minería, maquinaria de industria ligera, maquinaria de procesamiento agrícola y secundaria y la mayoría de la maquinaria de producción agrícola e industrial, así como electrodomésticos y equipos médicos.
Estado de la aplicación: los motores asíncronos más comunes son los motores asíncronos monofásicos y los motores asíncronos trifásicos, de los cuales el motor asíncrono trifásico es el cuerpo principal del motor asíncrono, el motor asíncrono trifásico se puede utilizar para impulsar una variedad de maquinaria de uso general como compresores, bombas, trituradoras, máquinas herramienta de corte, maquinaria de transporte y otros equipos mecánicos, en minería, maquinaria, metalurgia, petróleo, industria química, centrales eléctricas y otras empresas industriales y mineras como motor principal El motor se utiliza en minería, maquinaria, metalurgia, petróleo, industria química, central eléctrica y otras empresas industriales y mineras.
Los motores asíncronos monofásicos generalmente se utilizan en lugares donde no es conveniente una fuente de alimentación trifásica, en su mayoría motores en miniatura y de pequeña capacidad, que son más utilizados en electrodomésticos, como ventiladores eléctricos, refrigeradores, acondicionadores de aire, aspiradoras, etc.
En la actualidad, los motores de señal de posición más representativos: resolver, sincronizador de inducción y máquina de ángulo autoajustable.
(1) Transformador rotativo
El transformador rotatorio es un sensor electromagnético, también conocido como descomponedor síncrono. Es un pequeño motor de CA para medir ángulos, que se utiliza para medir el desplazamiento angular y la velocidad angular del objeto giratorio, y consta de un estator y un rotor. El devanado del estator se usa como el lado primario del transformador para recibir el voltaje de excitación, y la frecuencia de excitación suele ser de 400, 3000 y 5000 HZ, etc. El devanado del rotor se usa como el lado secundario del transformador para recibir el voltaje de excitación . El devanado del rotor se utiliza como lado secundario del transformador para obtener el voltaje inducido a través del acoplamiento electromagnético.
Estado de la aplicación: El resolutor es un dispositivo de detección de velocidad, posición y ángulo de precisión, que es adecuado para todas las ocasiones de resolutor de transformador rotativo que usan codificador rotatorio, especialmente para alta temperatura, frío, humedad, alta velocidad, alta vibración y otras ocasiones donde el codificador rotatorio no puede funcionar correctamente. Debido a las características anteriores del transformador rotativo, puede reemplazar completamente el codificador fotoeléctrico y es ampliamente utilizado en el sistema de detección de ángulo y posición en los campos del sistema de servocontrol, sistema de robot, herramientas mecánicas, automóvil, energía eléctrica, metalurgia, textil , impresión, aeroespacial, barcos, armas, electrónica, metalurgia, minería, campos petrolíferos, conservación de agua, industria química, industria ligera, construcción, etc. También se puede utilizar en transformación de coordenadas, operaciones trigonométricas y transmisión de datos angulares, y como dos -cambiador de fase de fase en el dispositivo de conversión de ángulo-digital.
sincronizador de induccion
El sincronizador de inducción se compone utilizando el principio de que la inductancia mutua de dos devanados planos varía con la posición y se puede utilizar para medir el desplazamiento lineal o angular. Entre ellos, la medición del desplazamiento lineal se denomina sincronizador de inducción lineal (o sincronizador de inducción largo), y la medición del desplazamiento angular se denomina sincronizador de inducción lateral (o sincronizador de inducción rotatorio). Los sincronizadores tienen las ventajas de alta precisión y resolución de agregación de medición, fuerte capacidad antiinterferente, baja influencia del entorno, larga vida útil, mantenimiento simple, se pueden empalmar en varias longitudes de medición y pueden mantener la precisión de la unidad, buena procesabilidad, bajo costo, fácil de copiar y producción por lotes. Por lo tanto, los sincronizadores se utilizan ampliamente en máquinas herramienta grandes y máquinas medianas como desplazamiento digital para proporcionar dispositivos de visualización o control.
Estado de la aplicación: los sincronizadores de inducción se usan ampliamente para medir el desplazamiento lineal, el desplazamiento angular y las cantidades físicas relacionadas con ellos, como la velocidad de rotación, la vibración, etc. El sincronizador de inducción lineal se usa a menudo en máquinas herramienta de gran precisión, fresadoras coordinadas y otras máquinas CNC. control de posicionamiento de herramientas y visualización digital; El sincronizador de inducción circular se usa a menudo en la necesidad de alcanzar el seguimiento fijo de la antena, guiar la guía escrupulosa, las máquinas herramienta de precisión o los instrumentos de medición y el dispositivo de indexación del equipo, etc.
máquina de ángulo autoajustable
La máquina de ángulo de autoalineación es el uso de características de autoalineación del ángulo en voltaje de CA o de voltaje de CA en el ángulo del micromotor de inducción, en el servosistema se usa como un sensor de desplazamiento para medir el ángulo. Las máquinas autoalineables también se pueden utilizar para transmitir, transformar, recibir e indicar señales de ángulo a largas distancias. Dos o más motores están conectados por circuitos de modo que dos o más ejes de rotación que no están conectados entre sí mecánicamente mantienen automáticamente el mismo cambio de ángulo, o giran sincrónicamente, y esta propiedad del motor se denomina característica de escalón de autointegración. En el servosistema, la máquina autosintonizadora utilizada en el lado generador se denomina transmisor, y la máquina autosintonizadora utilizada en el lado receptor se denomina receptor.
Estado de la aplicación: la máquina de ángulo autoalineable se usa ampliamente en metalurgia, navegación y otros sistemas de indicación de sincronización de posición y orientación y artillería, radar y otros servosistemas.
Este es mi resumen de alguna información sobre la clase de motor, si hay alguna deficiencia o lugar inadecuado, bienvenido a dejar un comentario. ¡Gracias!
Somos fabricante profesional de motores eléctricos en China.
Si tienes alguna demanda. ¡Por favor déjanos saber!
 saltar al contenido
saltar al contenido 













2 Respuestas
Oye, leí tu artículo y tu información es muy sorprendente y muy útil para mí. Sigue así y muchas gracias. 🙂 Más información en https://tsca.com.ph/
¡Gracias por sus amables comentarios!