¿Cuál es la diferencia entre un motor sin escobillas y un motor con escobillas?
¿Cuál es la diferencia entre un motor síncrono y un motor asíncrono?
¿Qué hay del motor de inducción de rotor bobinado?
¿Todos los servomotores son motores de CA?
¿Todos los servomotores son motores síncronos?
¿Los motores paso a paso pertenecen a los motores de corriente continua o a los motores de corriente alterna?
¿Es un servomotor un servomotor? ......
Los sabios dijeron una vez: Si el conocimiento no es sistemático, ¿cuál es la diferencia entre éste y un párrafo?
Pero el libro sabio sobre ese texto prolijo, esa terminología fantasiosa, esa explicación plausible, realmente mira a la gente en las nubes.
También busqué en Internet durante mucho tiempo, no encontré una explicación más sistemática de la estructura de los motores eléctricos y el principio de clasificación, por lo que tomó mucho esfuerzo consultar y organizar una copia.
Este artículo trata de explicar el conocimiento sistemático en un lenguaje sencillo y utiliza muchas animaciones e imágenes para expresar vívidamente el conocimiento oscuro.
Debido a mi conocimiento limitado, es inevitable que haya muchos errores, corrija a los expertos, no dude en dar consejos.
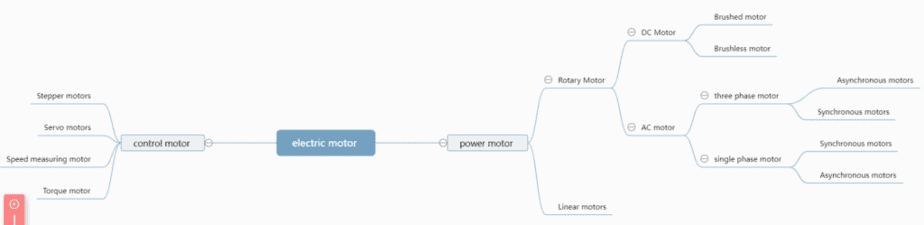
1. un diagrama para explicar los tipos básicos de motores eléctricos
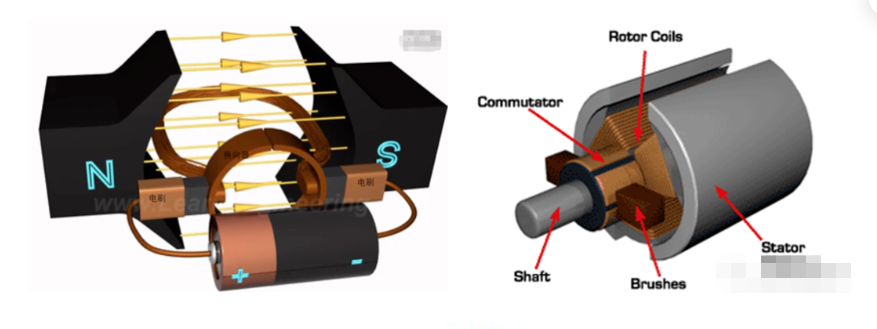
2. Motor eléctrico CC - motor de cepillo
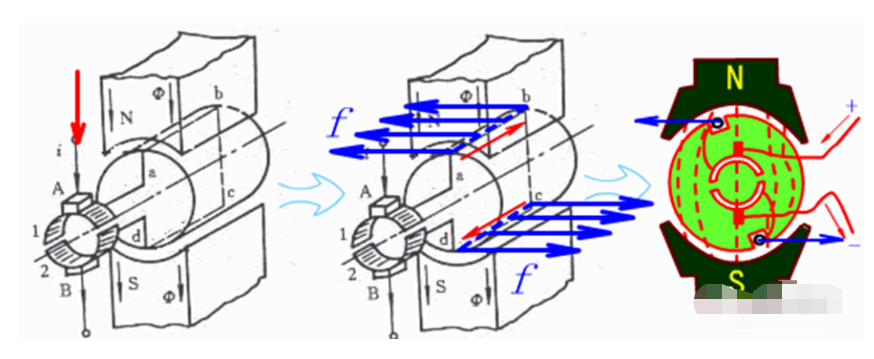
Lea la física de la escuela secundaria de la escoria matón, para estudiar el conductor energizado en la fuerza del campo magnético de esa cosa, hemos entrenado la mano izquierda en una palma rota, que es exactamente el principio del motor de inducción de CC.
Todos los motores eléctricos están compuestos por estator y rotor, en los motores eléctricos de CC, para que el rotor gire, debe cambiar constantemente la dirección de la corriente, de lo contrario, el rotor solo puede girar media vuelta, esto es como un pedal de bicicleta .
Por eso los motores de CC necesitan conmutadores.
En términos generales, los motores de CC con escobillas incluyen motores con escobillas y motores sin escobillas.
El motor de escobillas también se denomina motor de inducción de CC o motor de escobillas de carbón, a menudo denominado motor de CC de escobillas.
Utiliza conmutación mecánica, el polo externo no mueve la bobina interna (armazón) en movimiento, el conmutador y la bobina del rotor giran juntos, los cepillos y los imanes no se mueven, por lo que el conmutador y la fricción del cepillo completan el cambio de dirección actual.
Desventajas del motor del cepillo.
1, conmutación mecánica de chispas generadas por el conmutador y la fricción del cepillo, interferencia electromagnética, alto nivel de ruido, vida corta.
2, poca confiabilidad, muchas fallas, que requieren mantenimiento frecuente.
3, debido a la presencia de conmutador, limitando la inercia del rotor, limitando la velocidad máxima, afectando el rendimiento dinámico.
Dado que tiene tantas deficiencias, todavía se usa comúnmente, porque es de alto par, estructura simple, fácil mantenimiento (es decir, cambio de escobillas de carbón), barato.
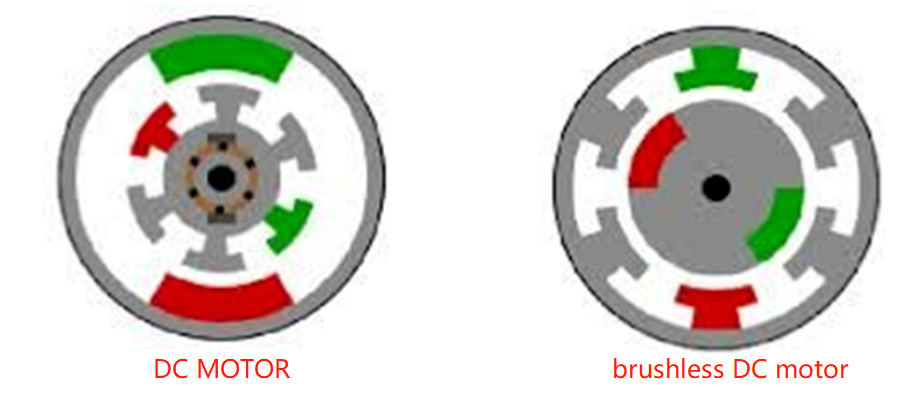
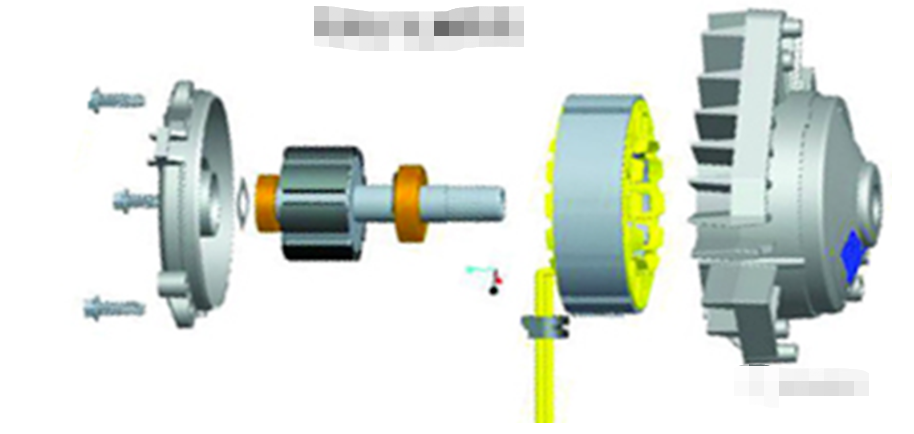
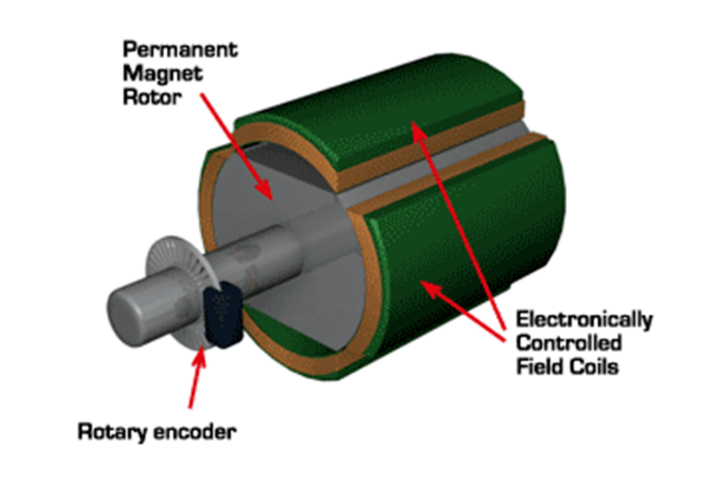
2. Motores CC - motores sin escobillas
El motor sin escobillas también se denomina motor inversor de CC (BLDC) en algunos campos, utiliza conmutación electrónica (sensor Hall), la bobina (armadura) no se mueve, los polos magnéticos se mueven, luego el imán permanente puede estar fuera de la bobina o dentro de la bobina , por lo que hay un motor sin escobillas de rotor externo y un motor sin escobillas de rotor interno
Los motores sin escobillas se construyen de la misma manera que los motores síncronos de imanes permanentes.
Sin embargo, un solo motor sin escobillas no es un sistema de potencia completo. Básicamente, el sistema sin escobillas debe ser controlado por un controlador sin escobillas, también conocido como ESC, para lograr un funcionamiento continuo.
Es el gobernador electrónico sin escobillas (ESC) el que realmente determina su rendimiento.
En general, hay dos tipos de corrientes de accionamiento para motores sin escobillas, una es una onda cuadrada y la otra es una onda sinusoidal.
A veces, el primero se denomina motor sin escobillas de CC y el segundo se denomina servomotor de CA, que es exactamente un tipo de servomotor de CA.
Los motores sin escobillas funcionan de diferentes maneras y se pueden dividir en motores sin escobillas de rotor interno y motores sin escobillas de rotor externo.
El rotor interior es trifásico, que es más caro.
El rotor exterior generalmente se usa en una sola fase, el precio de las personas, la producción en masa ha estado cerca del motor de escobillas de carbón, por lo que en los últimos años se usa ampliamente.
El precio del trifásico de rotor exterior se acerca al precio del rotor interior.
Bueno, como puede adivinar, la desventaja de los motores con escobillas es el punto de los motores sin escobillas.
Tiene alta eficiencia, bajo consumo de energía, bajo nivel de ruido, larga vida útil, alta confiabilidad, servocontrol, velocidad de conversión de frecuencia continua (hasta una velocidad muy alta) y otras ventajas.
Es relativamente más pequeño que el motor de CC con escobillas, el control que el motor de CA asíncrono es simple, el par de arranque es de gran capacidad de sobrecarga, en cuanto a las desventajas... es más caro que el motor de escobillas y mal mantenimiento.
2. Motor CC: principio de control de velocidad
Regulación de velocidad del motor de inducción de CC: la llamada regulación de velocidad, es decir, ajustando la velocidad del motor para obtener el par requerido.
El motor de CC de imán permanente ajusta el voltaje, la resistencia en serie, cambia la excitación puede ser la velocidad, pero el ajuste de voltaje real es el más conveniente y más comúnmente utilizado, el uso principal de la regulación de velocidad PWM.
PWM es en realidad a través del interruptor de alta velocidad para lograr la regulación de voltaje de CC, un ciclo, abierto durante mucho tiempo, el voltaje promedio es alto, apagado durante mucho tiempo, el voltaje promedio es bajo, muy conveniente para ajustar, siempre que el interruptor velocidad Siempre que la velocidad de conmutación sea lo suficientemente rápida, los armónicos de la red serán menores y la corriente será más continua.
Sin embargo, las escobillas y el conmutador se desgastan durante mucho tiempo y, al mismo tiempo, hay un gran cambio de corriente durante la conmutación, que es muy fácil de producir chispas.
El conmutador y las escobillas limitan la capacidad y la velocidad del motor de inducción de CC, lo que hace que la regulación de velocidad del motor de inducción de CC se encuentre con un cuello de botella.
Para el motor de inducción de CC sin escobillas, el control de velocidad solo controla el voltaje de entrada en la superficie.
Pero el sistema de control de frecuencia de autocontrol del motor (el motor CC sin escobillas viene con un detector de posición del rotor y otro dispositivo de adquisición de señal de posición del rotor, utilizando la señal de posición del rotor de este dispositivo para controlar el momento de cambio de fase del dispositivo de control de frecuencia de voltaje variable) controla automáticamente La frecuencia según el voltaje variable, que es casi la misma que la del motor DC (con escobillas), es muy conveniente. Muy conveniente.
Debido a que el rotor utiliza imanes permanentes, sin devanado de excitación especial, en el caso de la misma capacidad, el motor es más pequeño, más liviano, más eficiente, más compacto, operación más confiable, mejor rendimiento dinámico, en la conducción de vehículos eléctricos y otros aspectos han sido ampliamente utilizados.
3. Motores CA trifásicos - motores asíncronos
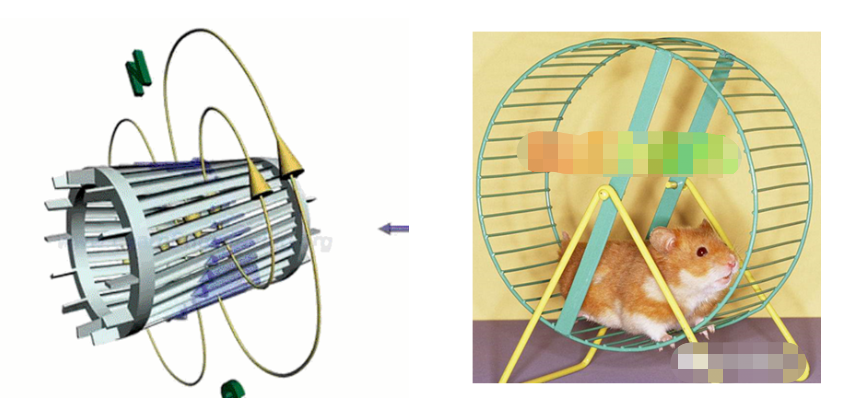
Los motores de CA se dividen en motores síncronos y motores asíncronos, los motores síncronos se usan principalmente en generadores y los motores asíncronos se usan principalmente en motores eléctricos. Son motores de inducción de jaula de ardilla.
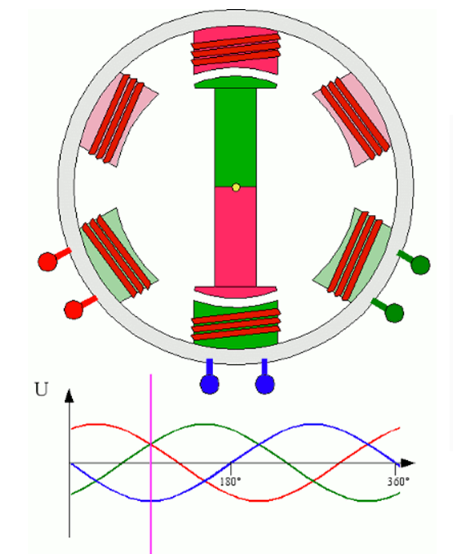
La carcasa del motor es el estator, y hay tres devanados de CA simétricos en el estator.
A medida que cambia la secuencia de las tres fases, se forma un campo magnético sintético giratorio y la velocidad de rotación del campo magnético es la velocidad sincrónica.
La velocidad síncrona n=60f/p, f es la frecuencia, p es el número de pares de polos, por ejemplo, para un motor de 2 polos conectado a la red nacional de 50 Hz (es decir, el número de pares de polos es 1 par), entonces la velocidad n=60*50/1=3000r/min.
Del mismo modo, la velocidad síncrona de los motores de 4, 6 y 8 polos es de 1500, 1000 y 750.
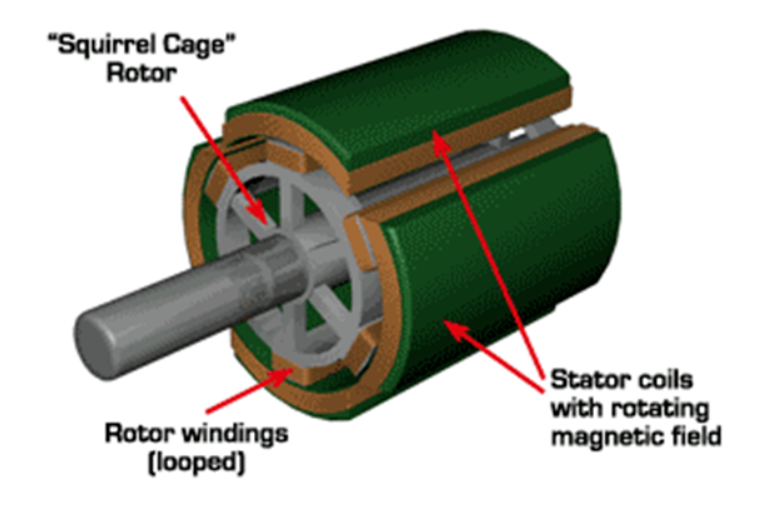
Los motores asíncronos tienen un mecanismo simple con un rotor de bobina cerrada, como un tipo de jaula de ardilla.
La bobina del rotor cortará el campo magnético giratorio para generar el potencial eléctrico inducido, que a su vez genera la corriente inducida y, finalmente, el campo magnético giratorio.
Para que el rotor se convierta en un electroimán y seguirá la rotación del campo magnético del estator, entonces la velocidad del rotor debe ser < el campo magnético giratorio del estator, para cortar las líneas de inducción magnética.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Es decir, la velocidad asíncrona del rotor. <velocidad síncrona, hay una diferencia de velocidad entre el campo magnético del rotor y el estator, por lo que se denomina motor asíncrono.
La velocidad nominal del motor asíncrono varía ligeramente de un fabricante a otro, alrededor de 2800+r/min para motores de 2 polos, 1400+,950+,700+ para motores asíncronos de 4, 6 y 8 polos.
La velocidad del motor asíncrono es alta cuando no hay carga y disminuye cuando hay carga.
El motor asíncrono tiene una estructura simple, fácil mantenimiento, operación confiable y precio económico, por lo que es ampliamente utilizado.
4. Motores CA trifásicos - motores síncronos
Motor sincrónico.
Si dejas que la velocidad del rotor = velocidad de rotación del campo magnético del estator, se convierte en un motor síncrono, en este momento es necesario convertir el estator en un electroimán o imán permanente, es decir, para energizar el estator, en este momento ya no es necesario para cortar la línea de inducción magnética puede girar, la velocidad de rotación y la velocidad de rotación del campo magnético son las mismas, es decir, la formación del motor síncrono.
La estructura del rotor del motor síncrono es más compleja que los motores asíncronos, los precios altos, en la vida útil de la producción no se usan tanto como los motores asíncronos, se usan principalmente como generadores, ahora centrales térmicas, centrales hidroeléctricas, turbinas de vapor, turbinas hidráulicas son básicamente motores síncronos.
5. Motor CA trifásico - regulación de velocidad de motores eléctricos asíncronos
Regulación de la velocidad del motor asíncrono: teóricamente, la frecuencia de CA, el voltaje o la resistencia del rotor del control del motor asíncrono, la distribución del polo del motor puede ser la regulación de la velocidad, pero en la práctica para lograr una regulación de velocidad infinita con el método de ajuste de la frecuencia y el voltaje para lograr.
Debido a que el rango de velocidad de regulación de voltaje no es grande, generalmente solo se puede usar en requisitos de control de velocidad que no son ocasiones altas, la aplicación no está muy extendida.
Regulación de velocidad de frecuencia variable: Hablando de frecuencia, es posible que hayamos oído hablar de ella.
El nombre completo de conversión de frecuencia es Frecuencia variable de voltaje variable (VVVF), lo que significa que el voltaje cambia cuando cambia la frecuencia, de modo que el rango de velocidad del motor asíncrono es lo suficientemente grande.
Los convertidores de frecuencia se pueden dividir en dos grandes categorías: convertidores de frecuencia CA-CA y convertidores de frecuencia CA-CC.
Inversor AC-DC: la potencia AC se transforma directamente en potencia AC de otra frecuencia mediante la electrónica de potencia.
La frecuencia de salida máxima no puede exceder la mitad de la frecuencia de entrada, por lo que generalmente se usa solo en sistemas de baja velocidad y alta capacidad, y puede eliminar la necesidad de un reductor de engranajes enorme.
El inversor AC-DC primero rectificará la alimentación de CA en CC y luego la convertirá en CA con frecuencia y voltaje controlables a través del inversor, con tecnología PWM, este tipo de inversor puede realizar una amplia gama de voltaje y frecuencia variables.
Para los vehículos eléctricos, el motor asíncrono es duradero, tiene una gran capacidad de sobrecarga y el algoritmo de control es tan maduro que se puede utilizar por completo.
6. Motor de CA trifásico: regulación de velocidad del motor síncrono
Regulación de la velocidad del motor síncrono:
Las máquinas síncronas no tienen tasa de reducción y el voltaje de control no puede cambiar la velocidad cuando se determina la estructura, por lo que antes de la aparición de los convertidores de frecuencia, los motores síncronos no estaban regulados en absoluto.
La apariencia del convertidor de frecuencia hace que el motor síncrono de CA también tenga un amplio rango de regulación de velocidad, porque su rotor también tiene excitación independiente (imán permanente o excitación eléctrica), su rango de regulación de velocidad es más amplio que el del motor asíncrono y el motor síncrono tiene se le ha dado una nueva vida.
El sistema de control de velocidad de frecuencia variable de voltaje variable del motor síncrono se puede dividir en otro control de velocidad variable controlado y control de velocidad variable autocontrolado.
Para la regulación de velocidad de frecuencia variable controlada por otros, es similar a la regulación de frecuencia variable del motor asíncrono, que puede controlarse mediante SVPWM y otros métodos de control de acuerdo con su modelo matemático, y su rendimiento es mejor que el del motor asíncrono de CA común.
El motor síncrono inversor autocontrolado solía tener una variedad de nombres en el proceso de desarrollo, como motor sin conmutador; cuando se usan imanes permanentes y se ingresa una onda sinusoidal trifásica, puede llamarse motor síncrono de imán permanente de onda sinusoidal; y si ingresa onda cuadrada, entonces puede llamarse motor síncrono de imán permanente de onda trapezoidal, sí, es similar a la máquina de CC sin escobillas (BLDM) mencionada anteriormente, no sentimos que un gran círculo de rap haya girado Volver, pero tú ahora debe tener una comprensión más profunda de la velocidad variable, por lo que el motor de CC sin escobillas cuando se usa la entrada de CC, pero el uso de la tecnología de conversión de frecuencia del motor síncrono (la misma estructura que el motor síncrono de imán permanente), en el Modelo 3 sobre el uso del motor sin escobillas de CC .
7. Motor asíncrono de CA monofásico - motor excitado en serie de CA monofásico (cepillo)
Motor excitado en serie de CA monofásico, comúnmente conocido como motor excitado en serie o motor universal (nombre extranjero de UniversalMotor, llamado así por CA y CC universal), el devanado del inducido y el devanado de excitación están conectados en serie para trabajar juntos.
El motor excitado en serie monofásico también se denomina motor excitado en serie de doble uso AC-DC, que puede funcionar con alimentación de CA o CC.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Las ventajas del motor monofásico excitado en serie son que tiene alta velocidad, alto par de arranque, tamaño pequeño, peso ligero, no es fácil bloquear la rotación, amplio rango de voltaje aplicable y puede regularse la velocidad mediante el método de regulación de voltaje. , que es simple y fácil de realizar.
Por lo tanto, es ampliamente utilizado en herramientas eléctricas, como amoladoras angulares, taladros manuales, etc.
La estructura del motor monofásico excitado en serie es muy similar a la del motor CC excitado en serie, la principal diferencia es que el núcleo del estator del motor monofásico excitado en serie debe estar hecho de acero al silicio laminado, mientras que los polos magnéticos de DC puede estar hecho tanto de estructura laminada como integral.
La regulación de velocidad del motor monofásico excitado en serie, la mayoría de los métodos utilizados para ajustar el voltaje, es cambiar el potencial eléctrico.
El método de regulación de voltaje del motor monofásico excitado en serie utiliza una regulación de voltaje de cambio de fase controlada, que usa el voltaje de activación del SCR para retrasarse con respecto al voltaje de entrada para lograr el disparo de cambio de fase del voltaje de entrada.
Hay métodos de hardware y software en la implementación.
El método de voltaje regulado, que utiliza tecnología de control de velocidad controlada por silicio, tiene una línea simple, un tamaño pequeño de componentes y otras características de un método simple y efectivo controlado por silicio.
(a) curva de variación de corriente CA;
(b) Dirección de rotación del rotor cuando la corriente es media onda positiva
(c) Dirección de rotación del rotor cuando la corriente es media onda negativa
8. Motor asíncrono de CA monofásico - motor de jaula de ardilla de CA monofásico (sin escobillas)
La corriente monofásica a través del devanado del inducido produce un campo magnético pulsante en lugar de un campo magnético giratorio, por lo que los motores asíncronos monofásicos no se pueden arrancar automáticamente.
Para resolver el problema de arranque, los motores asíncronos alimentados con CA monofásicos a menudo se fabrican para ser bifásicos.
El devanado principal es alimentado directamente por la fuente de alimentación monofásica; el devanado secundario es espacialmente diferente del devanado principal en 90° (ángulo eléctrico, igual al ángulo mecánico dividido por el número de pares de polos del motor).
El devanado secundario se conecta a una fuente de alimentación de CA monofásica después de la conexión en serie del condensador o la resistencia, de modo que la corriente que lo atraviesa y la corriente en el devanado principal tienen una cierta diferencia de fase.
Esto hace que el campo magnético sintético sea un campo giratorio elíptico, o quizás incluso cercano a un campo giratorio circular.
El motor obtiene así un par de arranque.
El motor que usa el método de separación de fase de resistencia es económico, por ejemplo, el devanado secundario se puede enrollar con un cable más delgado, pero el efecto de separación de fase es pobre y la energía se consume en la resistencia.
Después de que el motor arranca y alcanza cierta velocidad, el devanado secundario generalmente se elimina automáticamente mediante un interruptor centrífugo montado en el eje del motor para reducir las pérdidas resistivas y mejorar la eficiencia operativa.
Generalmente se usa para ocasiones en las que el requisito de par de arranque no es alto, como un torno pequeño, un refrigerador pequeño, etc. La desventaja es que la velocidad no se puede ajustar.
Es posible hacer que el campo magnético sintético del motor se acerque al campo magnético giratorio circular en un determinado punto de trabajo del motor, para obtener mejores características de trabajo.
Para que el motor asíncrono de fase dividida obtenga un mejor rendimiento de arranque o mejores características de funcionamiento o ambos, la capacitancia (cantidad de valor) requerida es diferente y se puede dividir en tres tipos
9. motores paso a paso - motores paso a paso de circuito abierto
Los motores paso a paso (bucle abierto) son motores controlados por bucle abierto que convierten las señales de impulsos eléctricos en desplazamientos angulares y se utilizan con mucha frecuencia.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
El número de pulsos se puede controlar para controlar la cantidad de desplazamiento angular, a fin de lograr el propósito de un posicionamiento preciso; al mismo tiempo, la frecuencia del pulso se puede controlar para controlar la velocidad y la aceleración de la rotación del motor, a fin de lograr el propósito de la regulación de la velocidad.
El motor paso a paso es un tipo de motor de inducción, que funciona mediante el uso de un circuito electrónico, es decir, un controlador, para convertir la alimentación de CC en una corriente de control de temporización multifásica alimentada por tiempo compartido.
Aunque los motores paso a paso funcionan con corriente continua, no pueden entenderse como motores de corriente continua, que son motores de potencia que convierten la energía eléctrica de corriente continua en energía mecánica, mientras que los motores paso a paso son motores de control de bucle abierto que convierten las señales de impulsos eléctricos en desplazamiento angular.
10. Comparación entre motor paso a paso y servo paso a paso
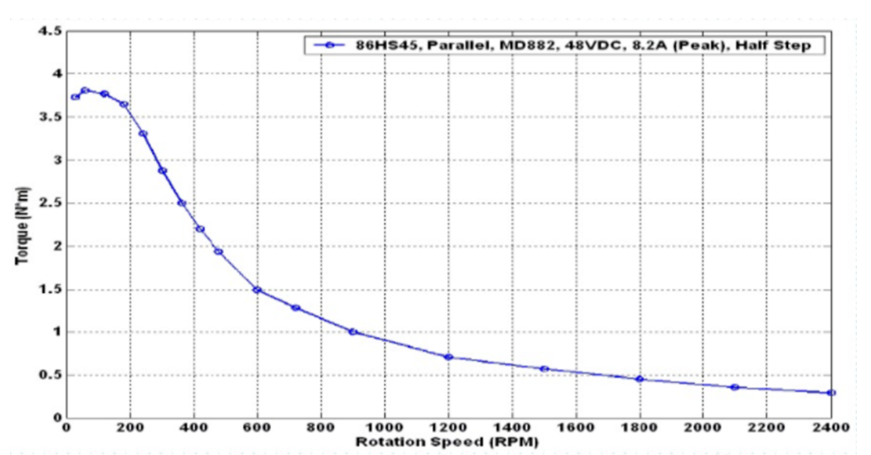
Tenga en cuenta que los motores paso a paso se utilizan en aplicaciones de baja velocidad: no más de 1000 r/min por minuto, el mejor rango de trabajo es 150 ~ 500 r/min (paso de circuito cerrado hasta 1500).
El motor paso a paso de 2 fases a 60 ~ 70 r/min es propenso al fenómeno de resonancia de baja velocidad, lo que genera vibración y ruido, lo que debe evitarse cambiando la relación de reducción, aumentando la fracción fina, agregando amortiguadores magnéticos, etc.
Precauciones de precisión de subdivisión, cuando el nivel de subdivisión es superior a 4, no se puede garantizar la precisión del ángulo de paso, requisitos de alta precisión, es mejor cambiar a más fases (es decir, ángulo de paso más pequeño) del motor paso a paso o cerrado- paso a paso de bucle, servomotor.
(Lazo abierto) motor paso a paso y servomotor 7 diferentes.
Precisión de control: la precisión del control del servomotor se puede configurar de acuerdo con el codificador, mayor precisión.
B características de baja frecuencia: los motores paso a paso son propensos a vibrar a bajas frecuencias, los servomotores no.
Características de momento-frecuencia C: el par del motor paso a paso se vuelve más pequeño con el aumento de la velocidad, por lo que su velocidad máxima de funcionamiento generalmente está en <1000r/min, el servomotor en la velocidad nominal (generalmente 3000r/min) puede generar el par nominal, en la velocidad nominal por encima de la potencia de salida constante, la velocidad máxima de hasta 5000 r/min;.
D capacidad de sobrecarga: el motor paso a paso no se puede sobrecargar, el par máximo del servomotor se puede sobrecargar 3 veces.
Rendimiento operativo E: motor paso a paso para control de bucle abierto, servomotor para control de bucle cerrado.
Respuesta de velocidad F: tiempo de arranque del motor paso a paso 0,15 ~ 0,5 s, servomotor 0,05 ~ 0,1, el más rápido 0,01 s para alcanzar los 3000 r/min nominales.
Indicadores de eficiencia G: eficiencia del motor paso a paso de aproximadamente el 60%, servomotor de aproximadamente el 80%.
En el uso real encontrará: servomotor caro, caro de muchos, por lo que los motores síncronos son más utilizados, especialmente en los requisitos de precisión de posicionamiento no son muy altos.
11. Motores paso a paso: motores paso a paso de circuito cerrado
Motores paso a paso de bucle cerrado: además de los motores paso a paso de bucle abierto, existen motores paso a paso que tienen un codificador agregado al final del motor, lo que permite un control de bucle cerrado.
El control de bucle cerrado de motores paso a paso utiliza retroalimentación de posición y/o retroalimentación de velocidad para determinar las transiciones de fase apropiadas para la posición del rotor, lo que puede mejorar en gran medida el rendimiento de los motores paso a paso.
Servosistemas sin fenómenos de desfase.
Ventajas de los motores paso a paso de circuito cerrado.
1. Respuesta de alta velocidad. En comparación con los motores adecuados, el paso a paso de circuito cerrado tiene un seguimiento muy fuerte de los comandos de posicionamiento, por lo que el tiempo de posicionamiento es muy corto. En la aplicación de inicio/parada frecuentes, el tiempo de posicionamiento se puede acortar significativamente.
2. Genera más torque que un servo ordinario. Compensa la falta de pérdida de pasos y la vibración de baja velocidad del sistema paso a paso ordinario.
3. Se puede generar un par alto incluso con una carga del 100 %, sin pérdida de funcionamiento por pasos, sin tener en cuenta la pérdida de par y otros problemas como los sistemas de pasos ordinarios.
4. Al aplicar la unidad de circuito cerrado, la eficiencia se puede aumentar a 7,8 veces, la potencia de salida se puede aumentar a 3,3 veces y la velocidad se puede aumentar a 3,6 veces.
Puede obtener una mayor velocidad de funcionamiento, una velocidad más estable y suave que el control de bucle abierto.
5. El motor paso a paso estará completamente estacionario cuando se detenga, sin el fenómeno de microvibración del servo ordinario.
Puede reemplazar la aplicación del servosistema de uso general cuando se requiere un posicionamiento de bajo costo y alta precisión.
12. Comparación entre motor paso a paso y servo de circuito cerrado paso a paso
Los motores paso a paso de bucle cerrado ajustan automáticamente el tamaño de la corriente del devanado de acuerdo con el tamaño de la carga, el calor y la vibración son menores que los motores paso a paso de bucle abierto, hay retroalimentación del codificador, por lo que la precisión es mayor que la de los motores paso a paso normales, la respuesta del motor que lazo abierto paso a paso más lento que los servomotores más rápido, hay un error de posición durante la operación, el error disminuirá gradualmente en milisegundos después de que el comando se detenga.
Par de alta velocidad que paso a paso de bucle abierto, aplicaciones comunes en la ocasión de 0-1500 rpm.
En resumen: motor paso a paso de circuito cerrado con bajo costo, alta eficiencia, sin fluctuaciones, sin microvibraciones, alta rigidez, sin rectificación, alta velocidad, alta respuesta dinámica, etc., es el reemplazo de servosistemas de alto costo, sistemas paso a paso de bucle abierto de gama baja y otras soluciones rentables
13. Servomotor - Servomotor general
El servomotor (servomotor), también llamado motor actuador, puede hacer que la velocidad de control, la precisión de la posición sean muy precisas, puede convertir la señal de voltaje en par y velocidad para impulsar el objeto de control.
A diferencia de la estructura principal del motor paso a paso, el servomotor es un motor de CC estándar o un motor de inducción de CA porque el circuito de control se coloca fuera del motor y la parte del motor dentro.
El servomotor se basa en pulsos para el posicionamiento. Cuando el servomotor recibe 1 pulso, gira en un ángulo correspondiente a 1 pulso.
Cada vez que el motor gira un ángulo, el codificador enviará el número correspondiente de pulsos de retroalimentación. Los pulsos de retroalimentación y los pulsos recibidos por el servocontrolador forman un control de bucle cerrado, de modo que el servocontrolador puede controlar la rotación del motor con mucha precisión para lograr un posicionamiento preciso.
Control de servomotores: generalmente, los servomotores para uso industrial están controlados por tres bucles, a saber, bucle de corriente, bucle de velocidad y bucle de posición, que pueden retroalimentar la aceleración angular, la velocidad angular y la posición de rotación de la operación del motor, respectivamente.
El chip controla la corriente de accionamiento de cada fase del motor a través de la retroalimentación de los tres, de modo que la velocidad y la posición del motor puedan funcionar con precisión según lo programado.
El servo AC tiene la característica de un par constante bajo la velocidad nominal, común 200 W, 400 W de inercia baja y media La velocidad nominal del servo AC es de 3000 rpm, la velocidad más alta es de 5000 rpm, alta velocidad.
El par es proporcional a la corriente, por lo que puede funcionar en el modo de par, como bloquear tornillos, presionar terminales y otras ocasiones que necesitan un par constante.
El ruido y la vibración del trabajo del servo AC son muy pequeños, de baja generación de calor.
El mismo volumen de inercia del rotor de inercia del motor es pequeño, la inercia del servo de 400 W solo es equivalente a la inercia del rotor del motor paso a paso de 57 base 2NM.
El servo tiene una capacidad de sobrecarga de corto tiempo, la selección debe considerar el multiplicador de sobrecarga del motor al acelerar y desacelerar.
El servo utiliza control de bucle cerrado y tiene el mismo error de seguimiento de posición que un paso a paso de bucle cerrado.
Servo requiere puesta en marcha antes de su uso.
El par original del motor paso a paso y del servo no es suficiente, a menudo es necesario trabajar con el reductor, puede usar el conjunto de engranajes reductores o el reductor planetario.
6. Servomotor - servo
Servo es una clase de servomotor de CC, que se utilizó por primera vez para modelos de aviones pequeños y ahora se usa para articulaciones de robots pequeños.
Según el análisis estructural, un servo consta de un pequeño motor de CC, además de sensores, chips de control y conjuntos de engranajes reductores, que están montados en una carcasa integrada.
Es capaz de controlar el ángulo de rotación a través de una señal de entrada (generalmente una señal PWM, pero también una señal digital).
Dado que es una versión simplificada, el control original de tres bucles del servomotor se simplifica a un bucle, es decir, solo se detecta el bucle de posición.
Una solución económica es un potenciómetro, que es detectado por una resistencia, mientras que una solución avanzada utilizará un sensor Hall o un codificador.
Los servos generales son económicos y compactos, pero tienen una precisión muy baja y una capacidad de calma de posición deficiente, y pueden satisfacer muchas necesidades de gama baja.
Con el auge de los pequeños robots de grado de consumo en los últimos dos años, los servos pequeños y livianos se han convertido instantáneamente en los componentes conjuntos más adecuados.
Sin embargo, las articulaciones de los robots requieren un rendimiento mucho mayor que los servos aéreos y, como producto comercial, también requieren servos de calidad mucho mayor que los reproductores de bricolaje.
¡Bienvenido a compartir con nosotros más información sobre motores eléctricos en el área de comentarios!
Cualquier consulta sobre el motor eléctrico, comuníquese con el motor eléctrico profesional fabricante en Porcelana como sigue:
Dongchun motor tiene una amplia gama de motores eléctricos que se utilizan en diversas industrias, como el transporte, la infraestructura y la construcción.
 saltar al contenido
saltar al contenido