La mayoría de nuestras fábricas de motores eléctricos producen motores pequeños mediante el proceso de ajuste a presión externo.
El núcleo del estator en la línea incrustada después de sumergir y hornear, presionado en el asiento debe garantizar que la posición axial cumpla con los requisitos de los dibujos.
De lo contrario, hará que un extremo de la bobina se estire demasiado, lo que resultará en dificultades totales de ensamblaje, y aumentará el potencial magnético del entrehierro del motor eléctrico, lo que afectará el rendimiento del motor eléctrico.
También aumentará el desgaste de la fuerza axial en el rotor de los motores eléctricos.
La posición axial del núcleo del estator en la carcasa generalmente está asegurada en la herramienta de ajuste a presión para neumáticos.
El tamaño de la tapa de presión se controla para que la posición del núcleo después del ajuste a presión esté de acuerdo con los requisitos del dibujo.
Para garantizar que el núcleo del estator no gire en la carcasa, el contacto entre el círculo interior de la carcasa y el círculo exterior del núcleo del estator por sí solo no es suficiente, por lo que cada motor eléctrico también está equipado con un tornillo de tope para fijar completamente el núcleo en la carcasa.
Ensamblaje del rotor
El montaje del rotor de un motor asíncrono incluye el montaje del núcleo y el eje del rotor, el montaje de los cojinetes y el montaje del ventilador.
Es el componente clave de la producción de motores eléctricos.
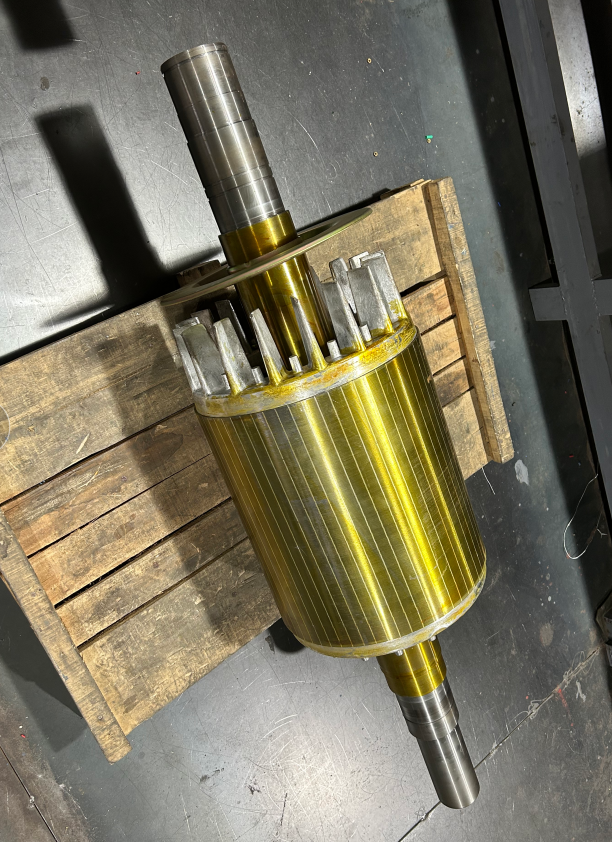
Montaje del núcleo del rotor y el eje
Cuando el motor eléctrico está en funcionamiento, la potencia mecánica sale a través del eje del rotor, por lo tanto, la confiabilidad de la combinación del núcleo del rotor y el eje es muy importante.
Cuando el diámetro exterior del rotor es inferior a 300 mm, el núcleo del rotor normalmente se presiona directamente sobre el eje del rotor; cuando el diámetro exterior del rotor es mayor de 300 mm a 400 mm.
El soporte del rotor se presiona primero en el núcleo y luego el eje del rotor se presiona en el soporte del rotor.
Los motores eléctricos de la serie Y adoptan una estructura en la que el núcleo del rotor se presiona directamente sobre el eje del rotor de la mayoría de los fabricantes.
Hay tres formas básicas de montaje entre el núcleo del rotor y el eje en la línea de producción: ajuste moleteado a presión en frío, ajuste de manguito caliente y ajuste de conexión de chaveta.
Ajuste moleteado a presión en frío En el ajuste moleteado a presión en frío, el proceso de procesamiento del eje es: terminar la lima del núcleo, moletear y esmerilar, luego presionar en el núcleo del rotor y luego terminar de esmerilar la extensión del eje, la lima del rodamiento y terminar el círculo exterior del núcleo. .
Cuando se utiliza el proceso de moleteado, tampoco se permite una interferencia excesiva.
Debido a que el tamaño de la presión de prensado en frío es proporcional a la cantidad de interferencia, cuando la cantidad de interferencia es demasiado grande, es posible que no se presione o que el material se deforme o dañe debido a una tensión interna excesiva.
El encamisado en caliente generalmente se lleva a cabo utilizando el calor residual del rotor de aluminio fundido (o recalentando el rotor).
El proceso de manga caliente ahorra equipo de prensado en frío, mientras que la combinación de eje y núcleo del rotor es más confiable.
Debido a que el manguito caliente se calienta para expandir la inclusión y luego se enfría, el orificio de la inclusión se contrae para contener la inclusión, lo que garantiza suficientes valores de interferencia y alta confiabilidad.
La ventaja de la conexión clave es que garantiza la fiabilidad de la conexión y facilita la organización de la producción de flujo.
La desventaja es que aumenta el proceso de procesamiento y el chavetero en el eje reduce la resistencia del eje, especialmente en motores eléctricos pequeños.
Cuando se utiliza una conexión clave, el ancho de la clave se selecciona de acuerdo con los requisitos especificados.
Para simplificar el proceso, normalmente es posible utilizar el mismo ancho de chavetero con la extensión del eje para máquinas eléctricas.
Conjunto de cojinete
En motores asíncronos de tamaño pequeño y mediano, la construcción con rodamientos es ampliamente utilizada. Son más ligeros que los cojinetes lisos, requieren un mantenimiento menos frecuente durante el funcionamiento y consumen menos grasa y aceite lubricante.
Al mismo tiempo, los rodamientos tienen un pequeño juego radial y son más adecuados para motores asíncronos con un pequeño espacio de aire.
Asamblea General
El montaje total de motores pequeños y medianos incluye el conjunto del rotor en el estator, la instalación de otros componentes, como tapas, cajas de conexiones, ventiladores externos y dispositivos de escobillas, etc. en muchos fabricantes.
Después del montaje total, también es necesario realizar pruebas y el acabado exterior del motor.
Montaje general de rotor en estator para la producción de motores eléctricos.
Encajar el rotor en el estator es uno de los procesos clave.
La operación incorrecta puede causar fácilmente magulladuras en los devanados y, a veces, incluso deformación del eje del rotor.
Al insertar el rotor, es necesario prestar atención a la posición correspondiente de la extensión del eje y la caja de conexiones.
Si la masa del rotor es inferior a 35 kg, se puede colocar en el estator con la mano.
Para rotores más grandes, se requieren herramientas de elevación.
En funcionamiento, levante primero la herramienta por el anillo de elevación 2 y colóquela en el eje del rotor, luego levante el rotor por el anillo de elevación 1 y sujete la palanca 3 para que el rotor penetre en el estator de forma horizontal y suave.
Instalación de la tapa final
Cuando instale la tapa del extremo, generalmente instale primero el extremo de la extensión que no es del eje.
Aplique una fina capa de aceite en la superficie del tope de montaje para evitar que se oxide la pieza de la boca.
Después de instalar la tapa del extremo, golpee alrededor de la tapa del extremo para apretar la cara del extremo de la tapa del extremo y el asiento, y luego apriete los pernos en diagonal por turnos.
Cuando se instala la segunda cubierta del extremo, el rotor debe levantarse completamente (el motor pequeño no se puede levantar), luego la cubierta del extremo se detiene y se ajusta el perno.
Si las dos tapas de los extremos se instalan con diferentes ejes, o las superficies de los extremos no son paralelas, el rotor puede girar estancado, debe usar un martillo para golpear las tapas de los extremos para eliminar los diferentes ejes, no fenómeno paralelo, para que el el rotor gira flexiblemente.
Luego instale la cubierta exterior del rodamiento, apriete los tornillos de la cubierta del rodamiento.
Ajuste del entrehierro
Para todo el rodamiento de la cubierta del extremo redondo del motor de tamaño mediano, cuando el rotor se inserta en el estator, la cubierta del extremo del rodamiento de bolas debe instalarse primero, y luego la cubierta del extremo del rodamiento de rodillos debe instalarse para evitar que el rodamiento se dañe.
Cuando la tapa del extremo del cojinete de bolas se debe instalar primero, el tornillo de la tapa del extremo no se debe apretar, después de instalar la tapa del extremo de la bola, luego apriete el tornillo.
Después de instalar la cubierta del extremo, para ajustar el espacio de aire.
El método de ajuste consiste en utilizar el gato (cuatro en ambos extremos) para ajustar la posición relativa de la tapa del extremo.
Use la regla de enchufe en la posición de 120. diferencia mutua para la medición (ambos extremos), hasta que la uniformidad del entrehierro esté en línea con las condiciones técnicas del estándar.
Después de ajustar el espacio de aire, se atornillará, en la punzonadora horizontal de acuerdo con la ubicación del orificio del pasador de posicionamiento de bola de masa de perforación de dibujo, y el pasador de posicionamiento de personas.
Montaje de sistema de escobillas en electrónica de potencia
En el motor eléctrico con contacto de anillo deslizante (como motor asíncrono de rotor de bobinado grande y mediano).
La calidad del montaje de las escobillas tiene un gran impacto en la situación de la conducción; en el motor con conmutador, la conmutación de la situación es buena o mala, muchas veces estrechamente relacionada con la calidad del conjunto del sistema de escobillas.
Las escobillas para anillo colector y conmutador son generalmente escobillas de grafito electroquímico y escobillas de grafito metálico.
El cepillo de grafito electroquímico está hecho de grafito natural después del procesamiento para eliminar las impurezas y luego sinterizado.
De acuerdo con las diferentes proporciones de las materias primas, se puede dividir en base de grafito, base de coque y base de negro de humo.
Las escobillas a base de negro de humo tienen un mayor coeficiente de resistencia y caída de tensión de contacto, y son adecuadas para motores con conmutación difícil; Las escobillas a base de grafito se usan comúnmente en motores normales.
Los cepillos de grafito galvanizado tienen menos dureza y un desgaste más lento, la densidad de corriente generalmente está disponible en 10-12A1cm2. Las escobillas de grafito de metal son adecuadas para motores de baja tensión y alta corriente, se sinteriza agregando 40% -50% de polvo de cobre en grafito.
Tiene alta densidad, baja dureza, bajo coeficiente de desgaste, bajo coeficiente de resistencia, baja caída de presión de contacto, desgaste lento y densidad de corriente generalmente disponible en 17-20 A/cm2 para una mayor calidad.
La disposición de las escobillas en el motor de CC, debido a que en las escobillas positivas y negativas debajo del conmutador, el grado de desgaste es inconsistente, por lo que debe ser una disposición razonable de la posición de la disposición de las escobillas.
Las escobillas deben estar escalonadas en la superficie del conmutador.
Automatización de montaje de pequeños motores para trenes de potencia eléctrica
Para mejorar la productividad laboral, reducir los costos de producción, acortar el desarrollo del producto o el ciclo de producción, para mejorar la competitividad de los productos en el mercado. La industria del motor en el país y en el extranjero está compitiendo para introducir tecnología de automatización en el campo del montaje de motores.
El primer sistema de automatización de ensamblaje de motores, representado por la línea de ensamblaje semiautomática de motores, se utilizó para el ensamblaje de motores pequeños con grandes cantidades y pocas especificaciones.
Esta línea de ensamblaje semiautomática incluye maquinaria de ensamblaje automático, como la máquina de carga del rotor, la máquina de ajuste a presión de rodamientos, la máquina de ajuste a presión de tapas de extremos y la máquina de apriete de tornillos, cuyas funciones son: carga del estator, inserción del rotor en el estator, ajuste a presión de cojinetes, tapa de extremo carga y apriete de mariposas y clavos.
El proceso de montaje principal se realiza con maquinaria y los trabajos auxiliares se realizan a mano.
El equipo de esta línea de ensamblaje semiautomática es fijo y tiene un ritmo de trabajo determinado, y la eficiencia de trabajo es alta, que puede alcanzar los 25-40 s/juego.
Para cumplir con los requisitos de ensamblaje automático de productos de múltiples especies y lotes pequeños, los países extranjeros han desarrollado celdas de ensamblaje flexible (FAC) y sistemas de ensamblaje flexible (FAS), los cuales utilizan robots controlados por computadora como equipo central y por lo tanto tener un alto nivel de automatización.
La celda de ensamblaje flexible incluye un robot de manipulación y varios robots de ensamblaje.
El robot de manipulación es responsable de manipular varias piezas y entregar las piezas ensambladas a la estación de trabajo del robot de ensamblaje en orden, y luego llevar las piezas ensambladas a la cinta transportadora para enviarlas.
Los equipos como bancos de trabajo y prensas están equipados en los robots de ensamblaje, que son responsables del ensamblaje de varias piezas.
La celda de ensamblaje flexible puede ensamblar diferentes tipos de componentes, y el programa de computadora también se puede cambiar para ensamblar productos de motor con diferentes especificaciones.
Basado en la celda de ensamblaje flexible, se ha desarrollado un sistema de ensamblaje flexible totalmente automatizado.
Este sistema incluye principalmente varias partes importantes, como la unidad de ensamblaje programable, el almacén de almacenamiento del sistema y el sistema de transferencia de logística flexible, cuyo núcleo es la unidad de ensamblaje programable.
La unidad de ensamblaje programable realiza el control del robot de ensamblaje cambiando el programa de la computadora y ensambla varios motores con diferentes especificaciones.
Para garantizar un suministro sin obstáculos de componentes al sistema de montaje y actuar como un amortiguador en caso de fallo del sistema, el sistema de montaje flexible tiene un almacén de almacenamiento.
El almacén está equipado con controles de estantería programables que permiten que la computadora brinde acceso aleatorio a cada unidad de almacenamiento.
El sistema de transferencia logística flexible consiste en una banda transportadora o vehículo de guiado automático (AGV), que se encarga del manejo de materiales y el intercambio de logística entre procesos dentro y fuera del sistema.
Los sistemas FAS generalmente usan un sistema de control de computadora distribuido jerárquico para administrar y controlar varios equipos automatizados en el sistema.
El sistema informático incluye una computadora principal, una computadora de gestión FAS, una computadora de logística y varias computadoras FAC.
A través de estas computadoras, el sistema FAS puede cambiar fácilmente el programa y controlar el sistema de ensamblaje para lograr el ensamblaje automático de motores de múltiples especificaciones.
Como ejemplo, un sistema de ensamblaje automático desarrollado en el extranjero puede ensamblar automáticamente 450 tipos de motores pequeños con diferentes especificaciones.
Esto demuestra que el sistema de ensamblaje flexible FAS no solo está altamente automatizado, sino que también es altamente adaptable, y es la dirección de la automatización para el ensamblaje de motores pequeños en la actualidad.
Además de la automatización del montaje, también existen líneas automáticas de prueba de fábrica de motores y líneas automáticas de pintura electrostática.
El uso de estas líneas automáticas mejorará en gran medida las condiciones laborales y aumentará la productividad laboral, y puede crear condiciones favorables para la realización de la producción metapersonalizada de fábricas de motores eléctricos.
Bienvenido a dejar un mensaje en el área de comentarios para cualquier información sobre motores eléctricos.
Cualquier consulta sobre el motor eléctrico, comuníquese con el principal fabricante de motores eléctricos en China: motor Dongchun de la siguiente manera;
Dongchun motor tiene una amplia gama de motores eléctricos que se utilizan en diversas industrias, como el transporte, la infraestructura y la construcción.
 saltar al contenido
saltar al contenido