 تخطى الى المحتوى
تخطى الى المحتوى 
يتم استهلاك ما يقرب من نصف استهلاك الطاقة في العالم بواسطة المحركات الكهربائية ، وبالتالي يقال إن الكفاءة العالية للمحركات الكهربائية هي الإجراء الأكثر فعالية في حل مشاكل الطاقة في العالم.
أنواع محركات كهربائية
بشكل عام ، يشير إلى تحول القوة الناتجة عن تدفق التيار في مجال مغناطيسي إلى عمل دوار ، وفي نطاق واسع ، يتضمن أيضًا إجراءً خطيًا.
اعتمادًا على نوع مصدر الطاقة المستخدم لقيادة المحرك ، هناك محركات التيار المستمر و المحركات الكهربائية AC.
ووفقًا لمبدأ دوران المحرك ، يمكن تقسيمه تقريبًا إلى الفئات التالية. (باستثناء المحركات الخاصة)
DC Electric Motor /DC (التيار المباشر)
المحركات المصممة
تسمى محركات الفرشاة المستخدمة على نطاق واسع بشكل عام المحركات الكهربائية DC.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
محرك DC بدون فرش
لا تستخدم محركات DC بدون فرش الفرش أو المتسابقين ، ولكن استخدام وظيفة التبديل مثل الترانزستور لتبديل التيار وأداء الإجراء الدوراني.
خطوات المحرك.
يعمل هذا المحرك بشكل متزامن مع قوة النبض ، وبالتالي يسمى أيضًا محرك تحريض النبض.
يتميز بالقدرة على تحقيق عملية تحديد موقع دقيقة بسهولة.
محركات التيار المتردد
محرك غير متزامن
تقوم طاقة التيار المتردد بتوليد حقل مغناطيسي دوار في الجزء الثابت ، والذي بدوره يولد تيارًا مستحثًا في الدوار ، والذي يحدث في دوران التفاعل في محرك تحريض AC.
محرك متزامن
تنشئ طاقة التيار المتردد مجالًا مغناطيسيًا دوارًا ، ويتم تدوير الدوار مع الأعمدة المغناطيسية بسبب الجاذبية.
-لحسن الحظ ، تتم مزامنة سرعة الدوران مع تواتر مصدر الطاقة.
حول التيارات والحقول المغناطيسية والقوى
أولاً ، من أجل تفسيرات مبدأ المحرك اللاحقة ، دعنا نراجع القوانين/القوانين الأساسية المتعلقة بالجزء الحالي والمغناطيسي والقوة.
على الرغم من وجود شعور بالحنين إلى الماضي ، إلا أنه من السهل نسيان هذه المعرفة إذا كنت لا تستخدم المكونات المغناطيسية عادة
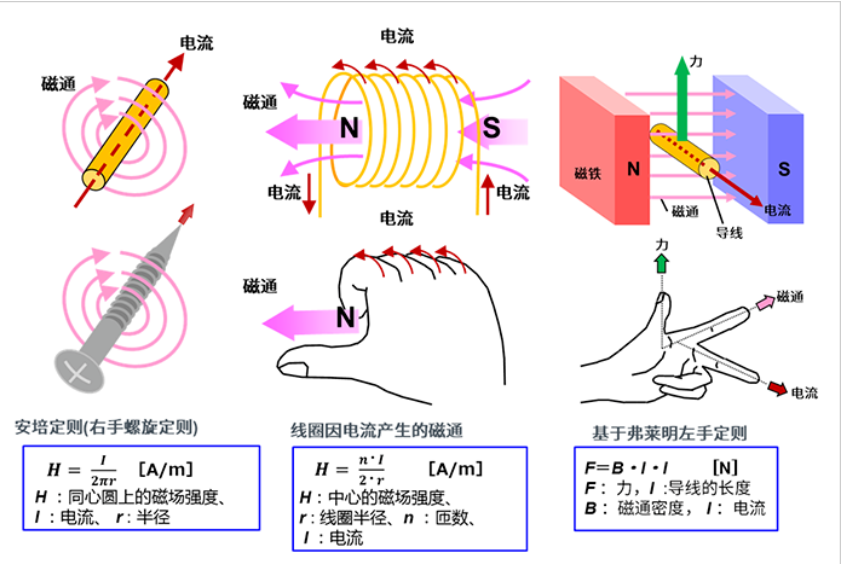
نحن نجمع بين الصور والصيغ لتوضيح.
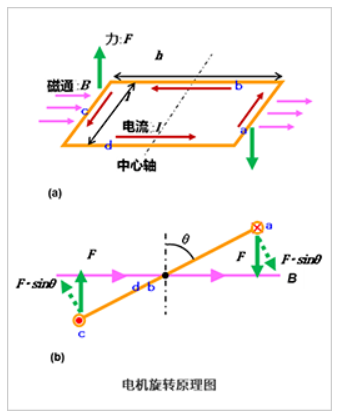
عندما يكون إطار السلك مستطيلًا ، يتم أخذ القوة التي تعمل على التيار في الاعتبار.
القوة F التي تعمل على أجزاء الجانبين A و C
يتم إنشاء عزم الدوران مع المحور المركزي كمحور مركزي.
على سبيل المثال ، عند النظر في حالة تكون فيها زاوية الدوران فقط θ ، فإن القوة التي تعمل في الزوايا الصحيحة إلى B و D هي sinθ ، لذلك يتم إعطاء عزم الدوران للجزء A بواسطة:
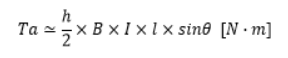
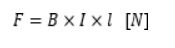
بالنظر إلى الجزء C بالطريقة نفسها ، يتم مضاعفة عزم الدوران ويولد عزم الدوران المحسوب بالمعادلة التالية

نظرًا لأن مساحة المستطيل هي s = h ・ l ، فإن استبداله في المعادلة أعلاه يعطي النتيجة التالية.

لا تنطبق الصيغة على المستطيلات فحسب ، ولكن أيضًا على الأشكال الشائعة الأخرى مثل الدوائر. يستخدم المحرك هذا المبدأ.
كيف يدور محرك كهربائي؟
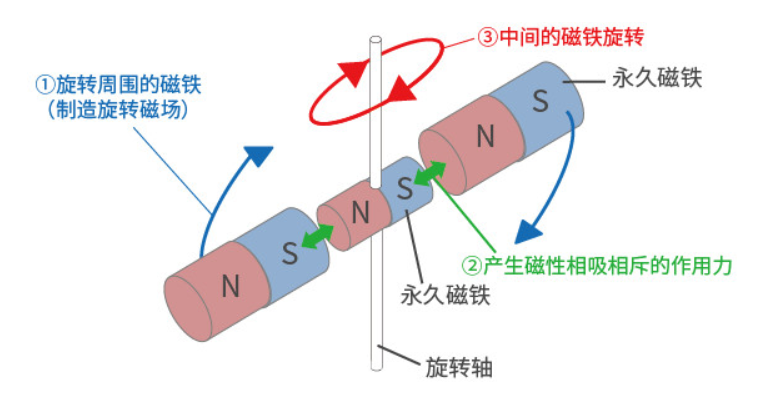
1) تدور المحركات التعريفية بمساعدة المغناطيس والقوة المغناطيسية
حول مغناطيس دائم مع رمح دوار ،
① يتم تدوير المغناطيس (بحيث يتم إنشاء مجال مغناطيسي دوار) ،
② ثم وفقًا للمبدأ القائل بأن أعمدة N و S تجذب بعضها البعض في أعمدة مختلفة وتصد بعضها البعض على نفس المستوى ،
③ سوف يدور المغناطيس مع عمود دوار.
هذا هو المبدأ الأساسي لتناوب محركات التيار المتردد.
يتسبب التيار المتدفق في الموصل في حقل مغناطيسي دوار (القوة المغناطيسية) حوله ، وبالتالي يدور المغناطيس ، وهو نفس حالة العمل مثل هذا.
بالإضافة إلى ذلك ، عندما يتم جرح السلك في شكل ملف ، يتم تصنيع القوة المغناطيسية ، مما يخلق تدفقًا كبيرًا في مجال المغناطيسي (Flux) ينتج أعمدة N و S.
بالإضافة إلى ذلك ، من خلال إدخال نواة حديدية في السلك الذي يشبه الملف ، تصبح الخطوط المغناطيسية للقوة سهلة المرور ويمكن توليد قوة مغناطيسية أقوى.
2) المحرك الدوار الفعلي
هنا ، كطريقة عملية لتدوير المحرك ، نقدم طريقة إنشاء مجال مغناطيسي دوار باستخدام محرك AC ثلاثي الطور والملفات.
(ثلاث مراحل AC المحركات الصناعية هي إشارة التيار المتردد متباعدة 120 درجة في الطور)
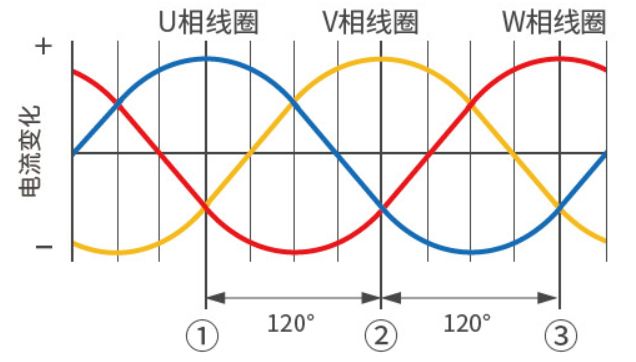
المجال المغناطيسي الاصطناعي في الحالة ① أعلاه يتوافق مع الشكل ① أدناه.
المجال المغناطيسي الاصطناعي في الحالة ② أعلاه يتوافق مع الشكل ② أدناه.
المجال المغناطيسي الاصطناعي في الحالة ③ أعلاه يتوافق مع الشكل ③ أدناه.
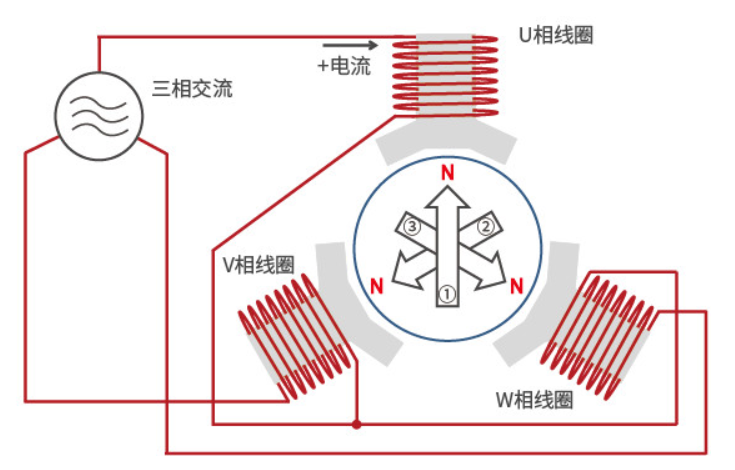
كما ذكر أعلاه ، يتم تقسيم لفائف جوهر الجرح إلى ثلاث مراحل ، مع تكوين فاصل 120 درجة من لفائف المرحلة U ، وملفات V-Phase ، وملفات W-Phase ، مع لفائف مع ارتفاع الجهد الناتج N-Pole والملف مع إنتاج S-Pole المنخفض.

كل مرحلة تتغير وفقًا لموجة جيبية ، وبالتالي فإن القطبية (القطب N ، القطب) والمجال المغناطيسي (القوة المغناطيسية) التي يتم إنشاؤها بواسطة كل ملف سوف تتغير.
في هذا الوقت ، يتغير الملف الذي ينتج عن القطب N وحده في التسلسل وفقًا لملف الطور U-Phase → V-Phase Coil → W-Phase Coil → U-phase ، وبالتالي يحدث الدوران.

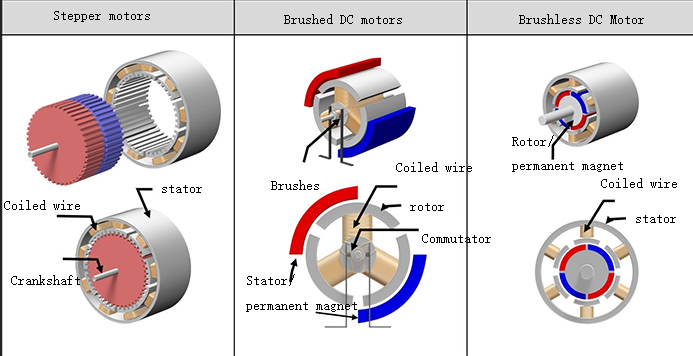
هيكل محرك صغير
يعطي الشكل التالي الهيكل التقريبي ومقارنة ثلاثة أنواع من المحركات الصناعية: محركات السهول ، ومحركات DC (DC) المصقولة ، ومحركات DC (DC) بدون فرش.
المكونات الأساسية لهذه المحركات هي بشكل أساسي لفائف ومغناطيس ودوارات ، وهناك أيضًا أنواع مثبتة على الملف ومغنطة وفقًا للنوع.
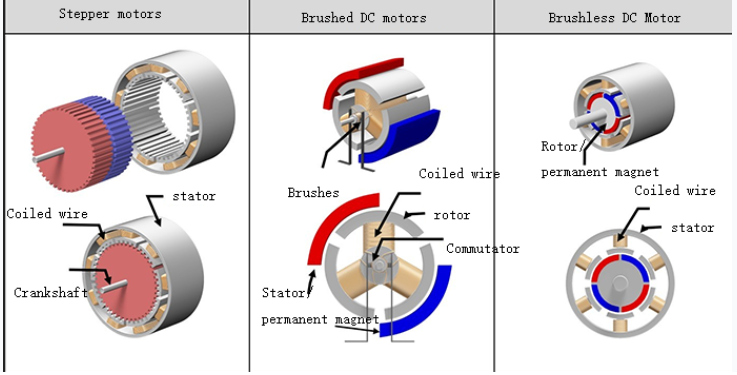
فيما يلي وصف للهيكل المرتبط بالمثال. نظرًا لوجود هياكل أخرى إذا تم تقسيمها بعناية أكبر ، يرجى فهم أن الهيكل المقدم في هذه الورقة تحت إطار كبير.
يتم تثبيت ملف محرك السائر هنا على الجانب الخارجي ويتم تدوير المغناطيس على الجانب الداخلي.
هنا يتم تثبيت مغناطيس محرك DC المصقول على الجانب الخارجي ويتم تدوير الملف على الجانب الداخلي. ر
هو الفرش والركاب مسؤولون عن توفير الطاقة للملف وتغيير اتجاه التيار.
في حالة محرك بدون فرش ، يتم تثبيت الملف في الخارج ويتم تدوير المغناطيس من الداخل.
يختلف بنية المحرك بدون فرش حتى لو كانت المكونات الأساسية هي نفسها بسبب الأنواع المختلفة من المحركات. سيتم شرح التفاصيل في كل قسم.
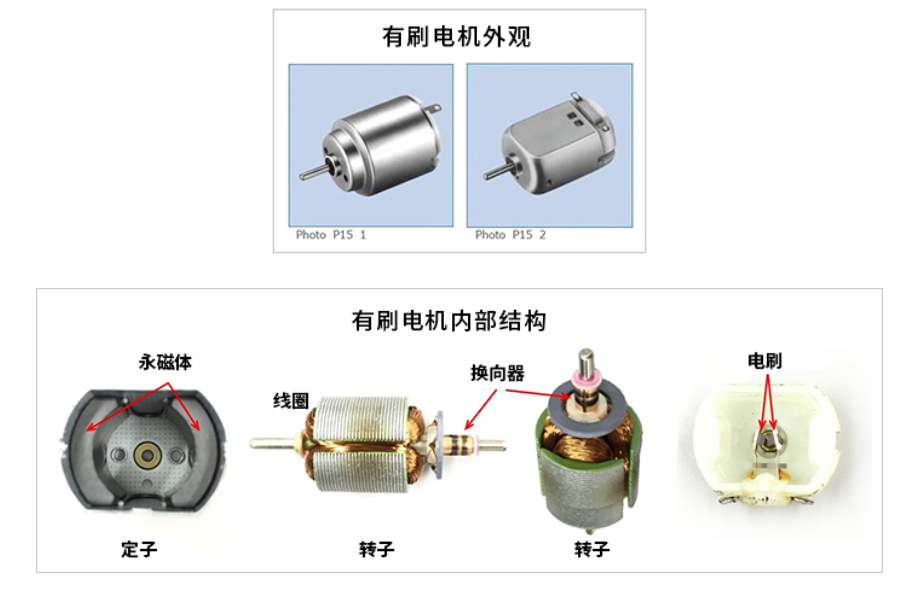
محرك الفرشاة
هيكل محركات التيار المستمر بالفرشاة
فيما يلي ظهور محرك DC المصقول غالبًا في النماذج ، ومخطط تخطيطي لانهيار محرك من نوع ثنائي القطب (2 مغناطيس) (3 لفائف). ربما يكون لدى الكثير منكم خبرة في تفكيك المحرك الكهربائي DC وإخراج المغناطيس.
يمكنك أن ترى أن المغناطيس الدائم لمحرك DC المصقول ثابتة ، ويمكن أن تدور لفائف محرك DC المصقول حول المركز الداخلي.
The fixed side is called the "stator" and the rotating side is called the "rotor".
فيما يلي رسم هيكلي يمثل مفهوم الهيكل.
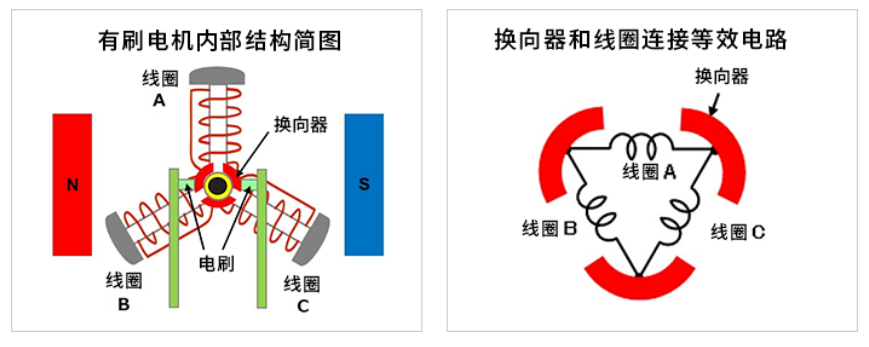
يحتوي محيط المحور المركزي الدوار على ثلاثة ركاب (صفائح معدنية عازمة للتبديل الحالي).
لتجنب الاتصال مع بعضها البعض ، يتم تكوين المتسابقين على بعد 120 درجة (360 درجة ÷ 3 قطع). يدور المتسلقون مع دوران العمود.
يتم توصيل أحد المتسابقين بنهاية ملف ونهاية الملف الأخرى ، وتشكل المتسلقون الثلاثة والملفات الثلاثة كاملاً (حلقة) كشبكة دائرة.
يتم تثبيت فرشين عند 0 درجة و 180 درجة للاتصال مع المتدرب.
يتم توصيل مصدر طاقة DC الخارجي بالفرش ويتدفق التيار في فرشاة المسار → ركاب → ملف → الفرشاة.
مبدأ الدوران من محرك الفرشاة العاصمة
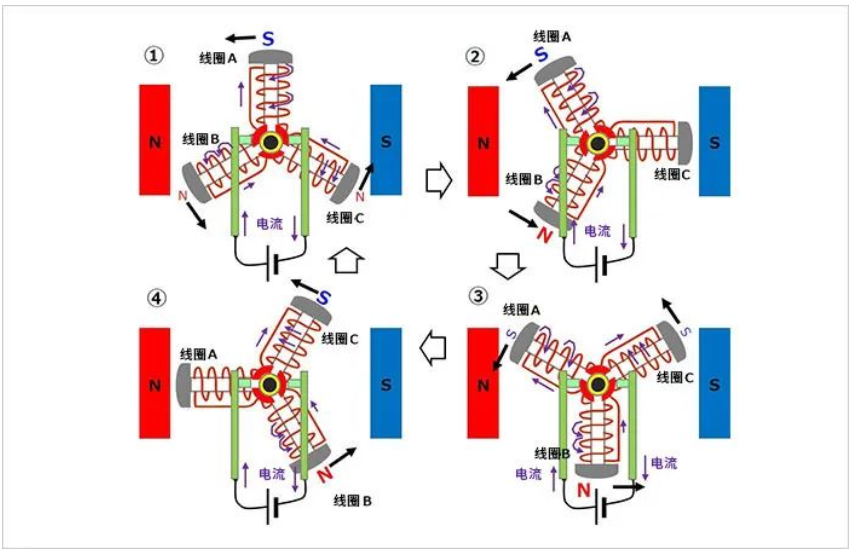
① قم بالتدوير عكس اتجاه عقارب الساعة من الحالة الأولية
يقع الملف A في الجزء العلوي وتوصيل إمدادات أدوات الطاقة بالفرش ، واضبط الجانب الأيسر كـ (+) والجانب الأيمن (-).
يتدفق تيار كبير من الفرشاة اليسرى عبر المتسابق إلى لفائف A.
هذا هو الهيكل الذي يصبح الجزء العلوي (خارج) لفائف A القطب S.
ونظرًا لأن 1/2 من التيار من ملف A يتدفق من الفرشاة اليسرى إلى لفائف B و C في الاتجاه المعاكس للملف A ، تصبح الجانبين الخارجيين للملفات B و C أوزان N ضعيفة (يشار إليها بأحرف أصغر قليلاً في الشكل).
تتسبب الحقول المغناطيسية الناتجة في هذه الملفات والآثار المثيرة للاشمئزاز والجذابة للمغناطيس إلى تعريض الملفات لقوة دوارة عكس اتجاه عقارب الساعة.
② مزيد من الدوران عكس اتجاه عقارب الساعة
بعد ذلك ، افترض أن الفرشاة الصحيحة على اتصال مع كل من المتسابقين في حالة يتم فيها تدوير الملف A 30 درجة في اتجاه عقارب الساعة.
يتدفق تيار الملف A بشكل مستمر من الفرشاة اليسرى عبر الفرشاة اليمنى ويبقى الجانب الخارجي من الملف S-Pole.
نفس التيار مثل الملف A يتدفق عبر الملف B ، ويصبح الجانب الخارجي من الملف B أقوى n-pole.
نظرًا لأن نهايات الملف C تقتصر على الفرش ، لا يتم إنشاء تدفقات التيار ولا يتم إنشاء مجال مغناطيسي.
حتى في هذه الحالة ، هناك قوة دوارة عكس اتجاه عقارب الساعة.
يتعرض الملف الموجود على الجانب العلوي من ③ إلى ④ بشكل مستمر لقوة تتحرك إلى اليسار ، ويتعرض الملف السفلي باستمرار إلى قوة تتحرك إلى اليمين ، وتستمر في تدوير عقارب الساعة
عندما يدور الملف كل 30 درجة إلى ③ و ④ ، يصبح الجانب الخارجي من الملف هو القطب S عندما يكون الملف فوق المحور الأفقي المركزي ؛ عندما يكون الملف أدناه ، يصبح القطب N ، ويتكرر الحركة.
بمعنى آخر ، يتعرض الملف العلوي مرارًا وتكرارًا لقوة تتحرك إلى اليسار ويتعرض الملف السفلي مرارًا وتكرارًا لقوة تتحرك إلى اليمين (كلاهما عكس اتجاه عقارب الساعة). هذا يؤدي إلى تدوير الدوار عكس اتجاه عقارب الساعة في جميع الأوقات.
إذا تم توصيل الطاقة بالفرشاة اليسرى المعاكسة (-) والفرشاة اليمنى (+) ، يتم إنشاء حقل مغناطيسي في لفائف الثابت لفائف في الاتجاه المعاكس ، لذلك تتحرك القوة المطبقة على الملفات في الاتجاه المعاكس ويصبح دوران في اتجاه عقارب الساعة.
بالإضافة إلى ذلك ، عندما يتم فصل الطاقة ، يتوقف دوار المحرك المصقول عن الغزل لأنه محروم من المجال المغناطيسي الذي يبقيه يدور.
محرك كامل الموجة الكامل الموجة
ظهور وهيكل محرك كامل الموجة الكامل للموجة
يوضح الشكل التالي مثالًا على مظهر وهيكل محرك بدون فرش.
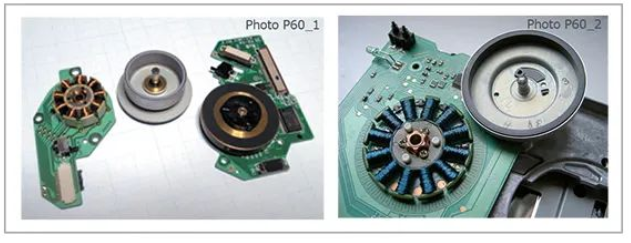
على اليسار مثال على محرك مغزل يستخدم لتدوير القرص في جهاز تشغيل القرص. هناك 9 لفائف من ثلاث مراحل × 3. على اليمين مثال على محرك المغزل لجهاز FDD مع 12 ملف (ثلاث مراحل × 4). يتم تثبيت الملفات على اللوحة والجرح في القلب.
الجزء على شكل قرص على الجانب الأيمن من الملفات هو دوار المغناطيس الدائم. يتم إدراج عمود الدوار في وسط الملف ويغطي جزء الملف ، ويحيط المغناطيس الدائم المحيط بالملف.
الهيكل الداخلي للمحرك الكامل للموجة الكاملة والدائرة المكافئة لاتصال الملف
التالي هو رسم للهيكل الداخلي والدائرة المكافئة لاتصال الملف.
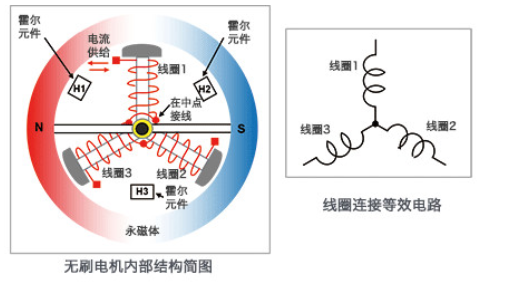
هذا المخطط الداخلي للبنية الداخلية هو مثال على محرك ثنائي القطب (2 مغناطيس) 3 فحف (3 لفائف) بهيكل بسيط للغاية. إنه مشابه لهيكل محرك مصقول مع نفس عدد الأعمدة والفتحات ، لكن جانب الملف ثابت ويمكن تدوير المغناطيس. بالطبع ، لا توجد فرش.
في هذه الحالة ، يتم توصيل الملفات في شكل Y ويتم استخدام عنصر أشباه الموصلات لتزويد التيار بالملفات ، والتحكم في تدفق وتدفق التيار وفقًا لموقف المغناطيس الدوار.
في هذا المثال ، يتم استخدام عنصر القاعة للكشف عن موضع المغناطيس. يتم تكوين عنصر القاعة بين الملف والملف للكشف عن الجهد الناتج واستخدام معلومات الموضع بناءً على قوة المجال المغناطيسي. في صورة محرك المغزل FDD المقدم سابقًا ، يمكنك أيضًا رؤية عنصر القاعة المستخدمة للكشف عن الموضع بين الملف والفائف (فوق الملف).
تُعرف عناصر القاعة بأجهزة الاستشعار المغناطيسية.
يمكن أن يحول حجم المجال المغناطيسي إلى حجم الجهد ويشير إلى اتجاه المجال المغناطيسي في المصطلحات الإيجابية أو السلبية.
فيما يلي مخطط يوضح تأثير القاعة.
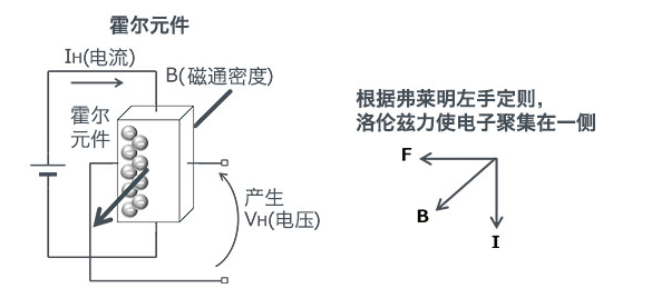
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
يتم التعبير عن VH الجهد الناتج عن طريق المعادلة التالية.
VH = (KH / D) ・ IH ・ B ※ KH: معامل القاعة ، D: سمك سطح اختراق التدفق
كما تظهر الصيغة ، كلما زاد التيار ، كلما ارتفع الجهد. غالبًا ما تستخدم هذه الخاصية للكشف عن موضع الدوار (المغناطيس).
مبدأ الدوران من محرك كامل الموجة الكامل
سيتم شرح مبدأ الدوران للمحرك بدون فرش في الخطوات التالية ① إلى ⑥. لسهولة الفهم ، يتم تبسيط المغناطيس الدائم من دائرة إلى مستطيل هنا.
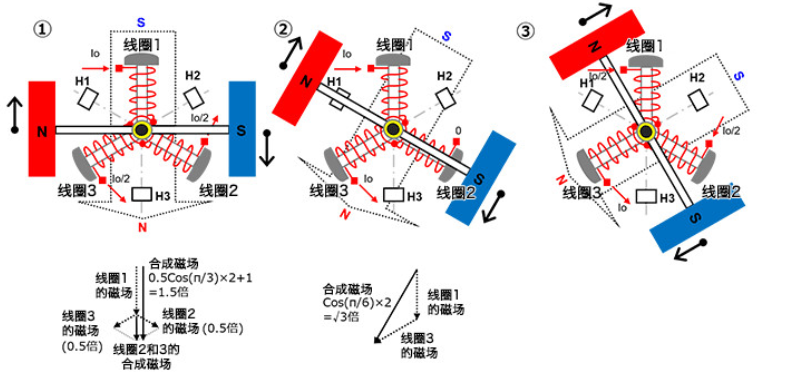
①
في ملف 3 طور ، دع ملفًا 1 يتم إصلاحه في الساعة 12 صباحًا ، ويتم إصلاح الملف 2 في الساعة الرابعة ، ويتم إصلاح الملف 3 في الساعة 8 من الساعة. دع N-Pole للمغناطيس الدائم ثنائي القطب على الجانب الأيسر و S-Pole على الجانب الأيمن وقابل للتدوير.
اجعل تدفق IO الحالي إلى ملف 1 لإنتاج المجال المغناطيسي S-Pole على الجزء الخارجي من الملف. دع IO/2 الحالي يتدفق من الملف 2 والملف 3 لإنتاج حقل مغناطيسي N-Pole على الجزء الخارجي من الملف.
عندما يتم تصنيع الحقول المغناطيسية للملفات 2 و 3 ، يتم توليد المجال المغناطيسي N-Pole لأسفل ، والذي يبلغ حجمه 0.5 أضعاف حجم المجال المغناطيسي المتولد عندما يمر IO الحالي عبر ملف ، ويصبح 1.5 ضعف الحجم عند الإضافة إلى الحقل المغناطيسي 1. ولدت ويدور المغناطيس الدائم في اتجاه عقارب الساعة.
عندما يتم تقليل التيار في الملف 2 ويتم زيادة التيار في الملف 3 وفقًا للموضع الدوار ، يدور الحقل المغناطيسي الاصطناعي أيضًا في اتجاه عقارب الساعة ويستمر المغناطيس الدائم في التدوير.
②
في الحالة المدورة التي تبلغ 30 درجة ، يتدفق IO الحالي إلى ملف 1 بحيث يكون التيار في الملف 2 صفراً ، مما يتسبب في تدفق IO الحالي من الملف 3.
يصبح الجانب الخارجي من الملف 1 القطب S ويصبح الجانب الخارجي من الملف 3 القطب N. عندما يتم تصنيع المتجه ، يكون المجال المغناطيسي المنتج √3 (≈1.72) مرتين المجال المغناطيسي المنتج عندما يمر IO الحالي عبر ملف واحد. ينتج هذا أيضًا مجالًا مغناطيسيًا توليفًا بزاوية 90 درجة فيما يتعلق بالمجال المغناطيسي للمغناطيس الدائم ، ويدور في اتجاه عقارب الساعة.
عندما يتم تقليل تيار التدفق IO من الملف 1 وفقًا للوضع الدوار ، يتم زيادة تيار التدفق لللف 2 من الصفر ، ويتم زيادة تيار التدفق الخارجي لللف 3 إلى IO ، ويتم تدوير المجال المغناطيسي الاصطناعي أيضًا في اتجاه عقارب الساعة ، ويستمر المغناطيس الدائم في التدوير.
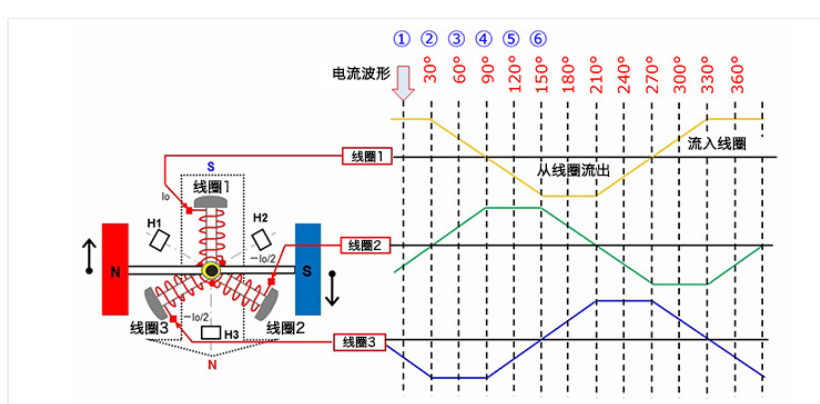
على افتراض أن التيار في كل مرحلة يكون الجيوب الأنفية ، فإن القيمة الحالية هنا هي IO × SIN (π⁄3) = io × √3⁄2. عن طريق تخليق المتجه في المجال المغناطيسي ، يكون حجم المجال المغناطيسي الكلي (√3⁄2) 2 × 2 = 1.5 أضعاف المجال المغناطيسي الناتج عن ملف واحد. عندما تكون التيارات في كل مرحلة الجيوب الأنفية ، يكون حجم المجال المغناطيسي لتوليف المتجه 1.5 أضعاف المجال المغناطيسي الناتج عن ملف واحد بغض النظر عن موضع المغناطيس الدائم ، والمجال المغناطيسي بزاوية 90 درجة فيما يتعلق بالحقل المغناطيسي للمغناطيس الدائم.
③
في الحالة التي استمر فيها الدوران لمدة 30 درجة ، يتدفق IO/2 الحالي إلى ملف 1 ، يتدفق IO/2 الحالي إلى ملف 2 ، ويتدفق IO الحالي من الملف 3.
يصبح الجانب الخارجي من الملف 1 هو القطب S ، ويصبح الجانب الخارجي من الملف 2 القطب S ، ويصبح الجانب الخارجي من الملف 3 القطب N. عندما يتم تصنيع المتجه ، يكون المجال المغناطيسي المنتج هو 1.5 أضعاف المجال المغناطيسي الناتج عندما يتدفق IO الحالي عبر ملف واحد (مثل ①). هنا أيضًا ، يتم إنشاء مجال مغناطيسي اصطناعي بزاوية 90 درجة فيما يتعلق بالمجال المغناطيسي للمغناطيس الدائم ، ويدور في اتجاه عقارب الساعة.
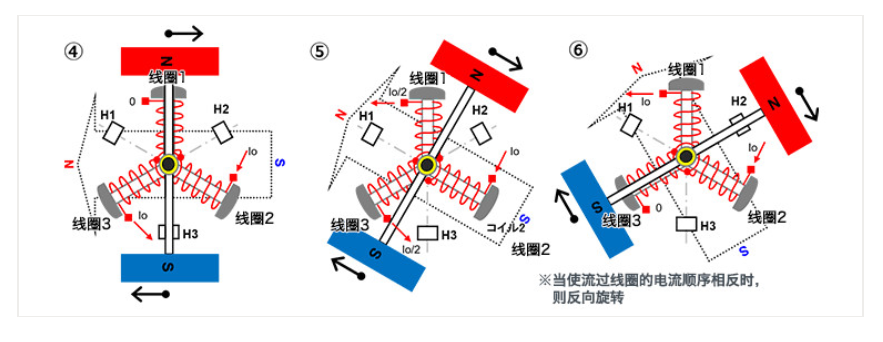
④~⑥
تدوير بنفس طريقة ① إلى ③.
وبهذه الطريقة ، إذا تم تبديل التيار الذي يتدفق إلى الملف بشكل مستمر بشكل مستمر وفقًا لموقف المغناطيس الدائم ، فسيتم تدوير المغناطيس الدائم في اتجاه ثابت. وبالمثل ، إذا تم عكس التيار واتجاه المجال المغناطيسي الاصطناعي ، فسوف يدور عكس اتجاه عقارب الساعة.
يوضح الرسم البياني التالي التيارات في كل ملف لكل خطوة من الخطوات ① إلى ⑥ أعلاه على التوالي. يجب فهم العلاقة بين التغيير الحالي والدوران من خلال الوصف أعلاه.
السائر المحركات
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
هيكل محرك السائر (ثنائي القطب ثنائي الطور)
تظهر المخططات التالية ، من اليسار إلى اليمين ، مثالًا على ظهور محرك السائر ، ورسم للهيكل الداخلي ، ورسم مفهوم الهيكل.
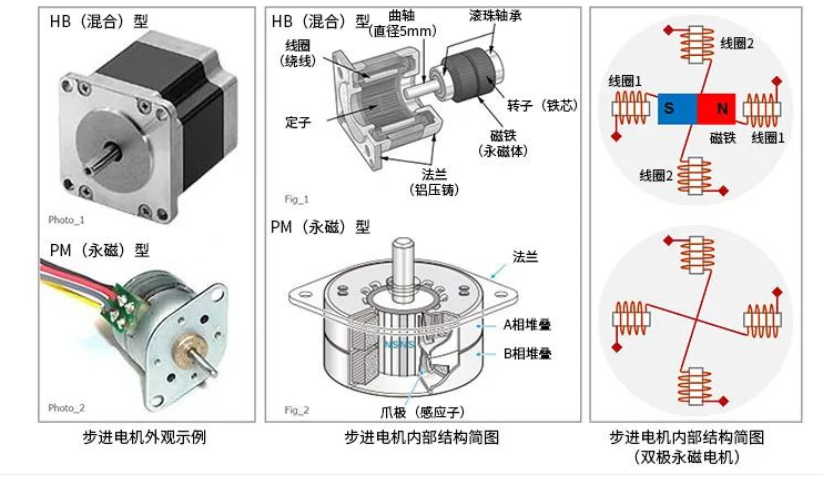
في مثال المظهر ، يتم إعطاء ظهور نوع HB (الهجين) و PM (المغناطيس الدائم) محركات السائر. يتم إعطاء مخطط الهيكل في الوسط أيضًا لنوع HB ونوع PM.
محرك السائر هو هيكل يتم فيه تثبيت الملف ويتم تدوير المغناطيس الدائم. يعد الرسم البياني المفاهيمي للهيكل الداخلي لمحرك السائر على اليمين مثالًا على محرك PM باستخدام مرحلتين (مجموعتين) من الملفات. في مثال بنية محرك السائر الأساسية ، يتم تكوين الملفات من الخارج ويتم تكوين المغناطيس الدائم في الداخل. بالإضافة إلى ملفات ثنائية الطور ، هناك أيضًا أنواع مع عدد أكبر من المراحل مثل ثلاث مراحل وخمس مراحل.
تحتوي بعض محركات السائر على هياكل مختلفة أخرى ، ولكن يتم إعطاء الهيكل الأساسي لمحرك السائر في هذه الورقة لتسهيل إدخال مبدأ التشغيل. من خلال هذه الورقة ، نأمل أن نفهم الهيكل الأساسي لمحركات السائر مع لفائف ثابتة ومغناطيس دائم.
مبدأ العمل الأساسي لمحرك السائر (الإثارة أحادية الطور)
يتم استخدام الرسم البياني التالي لإدخال مبدأ التشغيل الأساسي لمحرك السائر. هذا مثال على الإثارة لكل مرحلة (مجموعة من الملفات) من لفائف النوع الثنائي القطب ثنائي الطور أعلاه. فرضية المخطط هي أن الحالة تتغير من ① إلى ④. تتكون الملفات من ملف 1 و Coil 2 ، على التوالي. بالإضافة إلى ذلك ، تشير الأسهم الحالية إلى اتجاه التدفق الحالي.
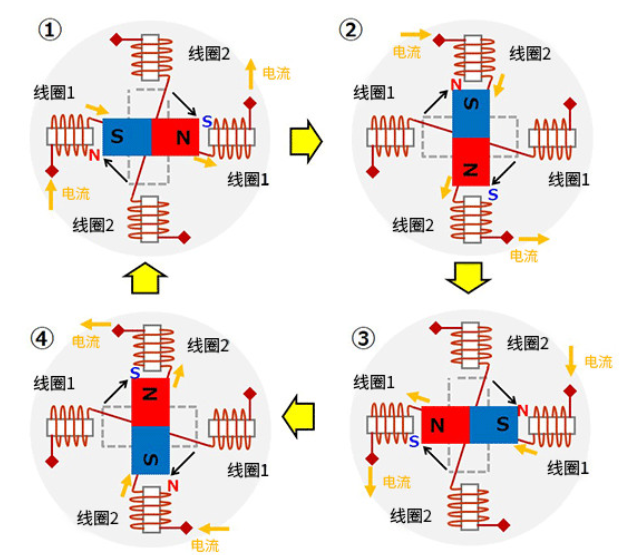
①
・ اجعل التدفق الحالي من الجانب الأيسر من الملف 1 والخروج من الجانب الأيمن من الملف 1.
・ لا تسمح للتيار بالتدفق من خلال الملف 2.
・ في هذا الوقت ، يصبح الجانب الداخلي من الملف الأيسر 1 ن ويصبح الجانب الداخلي من الملف الأيمن 1 س.
・ نتيجة لذلك ، ينجذب المغناطيس الدائم الأوسط بواسطة المجال المغناطيسي للملف 1 ويتغير إلى الجانب الأيسر والجانب الأيمن N ويتوقف.
②
・ يتم إيقاف تيار الملف 1 بحيث يتدفق التيار من الجانب العلوي من الملف 2 والخروج من الجانب السفلي من الملف 2.
・ يتغير الجانب الداخلي من الملف العلوي 2 إلى N والجانب الداخلي من الملف السفلي 2 تغييرات إلى S.
・ ينجذب المغناطيس الدائم عن طريق مجاله المغناطيسي ويدور 90 درجة في اتجاه عقارب الساعة للتوقف.
③
・ يتم إيقاف تيار الملف 2 بحيث يتدفق التيار من الجانب الأيمن من الملف 1 والخروج من الجانب الأيسر من الملف 1.
・ يصبح الجانب الداخلي من الملف الأيسر 1 S ويصبح الجانب الداخلي من الملف الأيمن 1 N.
・ ينجذب المغناطيس الدائم عن طريق مجاله المغناطيسي ويدور في اتجاه عقارب الساعة بمقدار 90 درجة آخر للتوقف.
④
・ أوقف التيار في الملف 1 بحيث يتدفق التيار من الجانب السفلي من الملف 2 والخروج من الجانب العلوي من الملف 2.
・ يصبح الجانب الداخلي من الملف العلوي 2 S ويصبح الجانب الداخلي من الملف السفلي 2 N.
・ ينجذب المغناطيس الدائم عن طريق مجاله المغناطيسي ويدور في اتجاه عقارب الساعة بمقدار 90 درجة آخر للتوقف.
يمكن تدوير محرك السائر عن طريق تبديل التيار يتدفق عبر الملف بواسطة الدائرة الإلكترونية بترتيب ① إلى ④ أعلاه. في هذا المثال ، يتسبب كل إجراء تبديل في تدوير محرك السائر 90 درجة.
بالإضافة إلى ذلك ، عندما يتدفق التيار باستمرار عبر لفائف ، يمكن الحفاظ على حالة التوقف ويمكن أن يكون لمحرك السائر عزم دوران. بالمناسبة ، إذا تم عكس ترتيب التيار المتدفق عبر الملف ، فيمكن تدوير محرك السائر في الاتجاه المعاكس.
ابحث عن الشركة المصنعة للمحركات الصناعية المهنية - Dongchun Motor China







