 تخطى الى المحتوى
تخطى الى المحتوى ما هو الفرق بين المحرك بدون فرش والمحرك المصقول؟
ما هو الفرق بين المحرك المتزامن والمحرك غير المتزامن؟
ماذا عن المحرك التعريفي الجرح الدوار؟
هل جميع المحركات المؤازرة محركات التيار المتردد؟
هل جميع المحركات المؤازرة محركات متزامنة؟
هل تنتمي محركات السائر إلى محركات التيار المستمر أو محركات التيار المتردد؟
هل محرك السيرفو هو محرك سيرفو؟ ......
قال الحكماء: إذا كانت المعرفة ليست منهجية فما الفرق بينها وبين الفقرة؟
لكن الكتاب الحكيم عن ذلك النص الطويل ، ذلك المصطلح الخيالي ، هذا التفسير المعقول ، ينظر حقًا إلى الناس في السحاب.
لقد بحثت أيضًا في الإنترنت لفترة طويلة ، ولم أجد شرحًا أكثر منهجية لهيكل المحركات الكهربائية ومبدأ التصنيف ، لذا فقد بذلوا جهدًا كبيرًا للاستعلام عن نسخة وتنظيمها.
تحاول هذه المقالة شرح المعرفة المنهجية بلغة واضحة ، وتستخدم الكثير من الرسوم المتحركة والصور للتعبير عن المعرفة الغامضة بوضوح.
بسبب معرفتي المحدودة ، لا مفر من وجود العديد من الأخطاء ، يرجى تصحيح الخبراء ، من فضلك لا تتردد في تقديم المشورة.
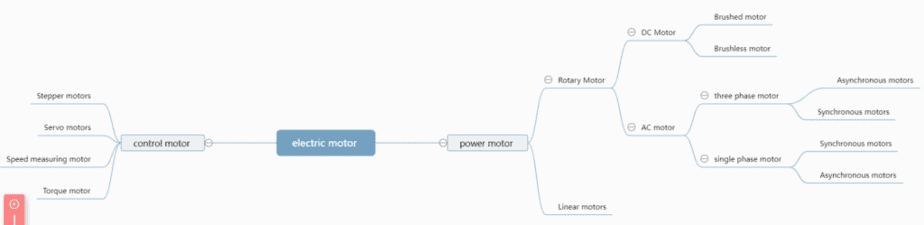
1. رسم تخطيطي لشرح الأنواع الأساسية للمحركات الكهربائية
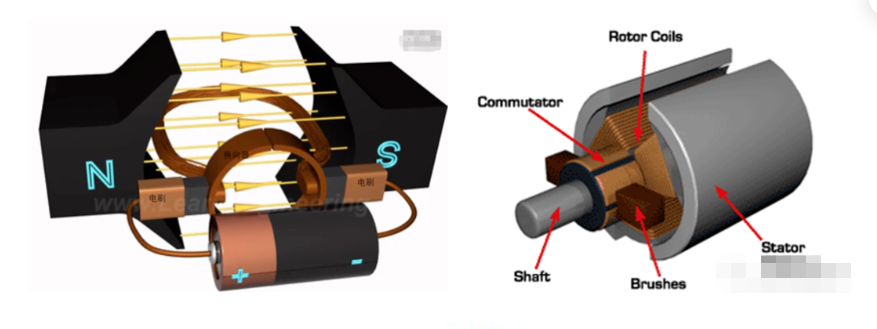
2. محرك كهربائي DC - محرك فرشاة
اقرأ فيزياء المدرسة الثانوية لحثالة الفتوة ، من أجل دراسة الموصل النشط في قوة المجال المغناطيسي لذلك الشيء ، قمنا بتدريب اليد اليسرى على راحة اليد المكسورة ، وهو بالضبط مبدأ المحرك التعريفي DC.
تتكون جميع المحركات الكهربائية من الجزء الثابت والدوار ، في المحركات الكهربائية التي تعمل بالتيار المستمر ، من أجل جعل الدوار يدور ، فأنت بحاجة إلى تغيير اتجاه التيار باستمرار ، وإلا فإن الدوار يمكن أن يدور نصف دورة فقط ، وهذا يشبه دواسة الدراجة .
لهذا السبب تحتاج محركات التيار المستمر إلى مبدلات.
بشكل عام ، تشتمل محركات DC المصقولة على محركات مصقولة ومحركات بدون فرش.
يُطلق على محرك الفرشاة أيضًا محرك تحريضي DC أو محرك فرشاة كربون ، وغالبًا ما يشار إليه باسم محرك DC للفرشاة.
إنه يستخدم التبديل الميكانيكي ، والقطب الخارجي لا يحرك الملف الداخلي (المحرك) المتحرك ، والمبدل والملف الدوار يدوران معًا ، والفرش والمغناطيس لا يتحركان ، وبالتالي فإن احتكاك المبدل والفرشاة ، يكملان تبديل الاتجاه الحالي.
عيوب محرك الفرشاة.
1 ، التخفيف الميكانيكي للشرر الناتج عن المبدل واحتكاك الفرشاة ، والتداخل الكهرومغناطيسي ، والضوضاء العالية ، والعمر القصير.
2 ، ضعف الموثوقية ، العديد من الإخفاقات ، تتطلب صيانة متكررة.
3 ، بسبب وجود المبدل ، والحد من الجمود الدوار ، والحد من السرعة القصوى ، مما يؤثر على الأداء الديناميكي.
نظرًا لوجود العديد من أوجه القصور في استخدامه بشكل شائع ، نظرًا لعزم الدوران العالي ، وسهولة الصيانة الهيكلية (أي تغيير فرش الكربون) ، ورخيصة الثمن.
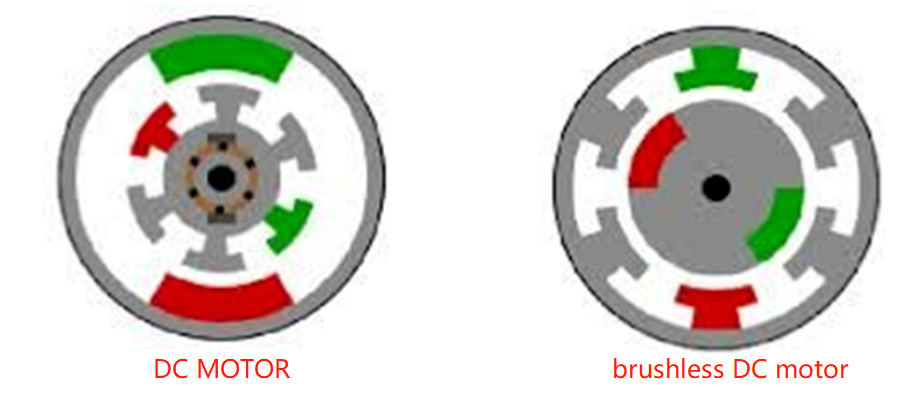
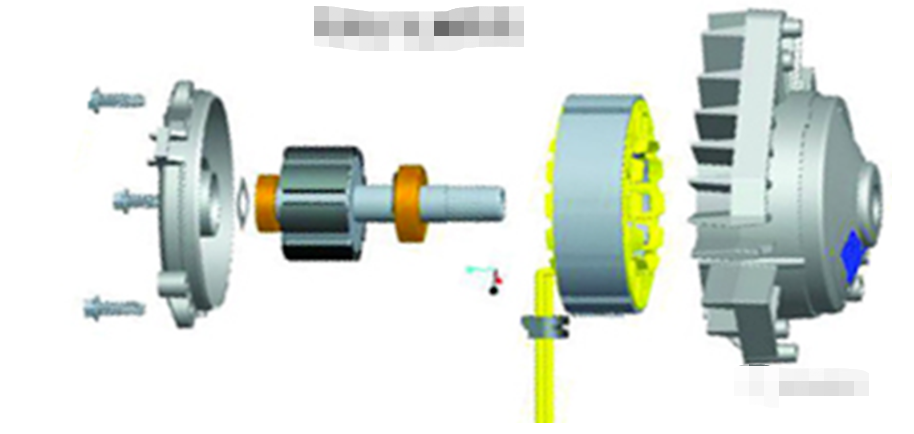
2. محركات التيار المستمر - محركات بدون فرش
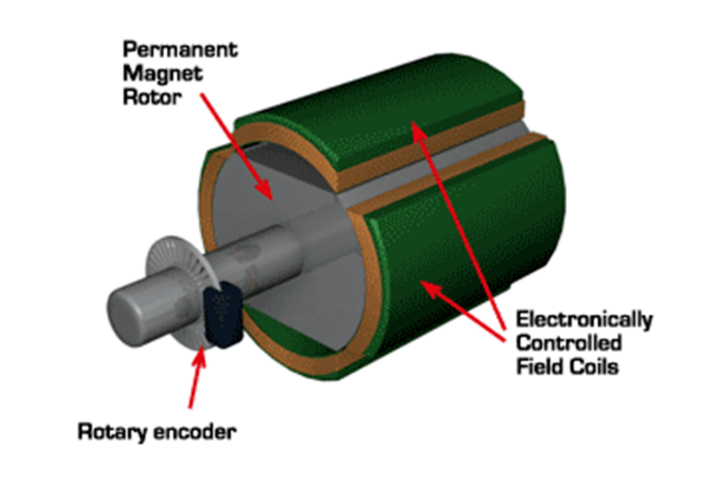
يُطلق على المحرك عديم الفرشاة أيضًا محرك DC العاكس (BLDC) في بعض المجالات ، ويستخدم التبديل الإلكتروني (مستشعر القاعة) ، ولا يحرك الملف (المحرك) الأقطاب المغناطيسية ، ثم يمكن أن يكون المغناطيس الدائم خارج الملف أو داخل الملف ، لذلك يوجد محرك خارجي بدون فرش ومحرك دوار داخلي بدون فرش
يتم تصنيع المحركات عديمة الفرشاة بنفس طريقة تصنيع المحركات المتزامنة ذات المغناطيس الدائم.
ومع ذلك ، فإن محركًا واحدًا بدون فرش ليس نظام طاقة كاملًا. يجب التحكم في الفرشاة بشكل أساسي بواسطة وحدة تحكم بدون فرش ، تُعرف أيضًا باسم ESC ، لتحقيق التشغيل المستمر.
إن الحاكم الإلكتروني بدون فرش (ESC) هو الذي يحدد أدائه حقًا.
بشكل عام ، هناك نوعان من التيارات الدافعة للمحركات الخالية من الفرشاة ، أحدهما موجة مربعة والآخر موجة جيبية.
في بعض الأحيان ، يُطلق على الأول محرك DC بدون فرشات ، والأخير يسمى محرك سيرفو AC ، وهو بالضبط نوع من محركات التيار المتردد المؤازرة.
تعمل المحركات عديمة الفرشاة بطرق مختلفة ، ويمكن تقسيمها إلى محركات بدون فرش ذات دوار داخلي ومحركات بدون فرش.
يتكون الجزء المتحرك الداخلي من ثلاث مراحل ، وهو أغلى ثمناً.
عادة ما يتم استخدام الدوار الخارجي في مرحلة واحدة ، وسعر الناس ، والإنتاج الضخم قريب من محرك فرشاة الكربون ، لذلك في السنوات الأخيرة يستخدم على نطاق واسع.
سعر الدوار الخارجي ثلاثي الأطوار قريب من سعر الدوار الداخلي.
حسنًا ، كما يمكنك التخمين ، فإن عيب محركات الفرشاة هو نقطة المحركات بدون فرش.
تتميز بكفاءة عالية ، واستهلاك منخفض للطاقة ، وضوضاء منخفضة ، وعمر طويل ، وموثوقية عالية ، وتحكم مؤازر ، وسرعة تحويل التردد غير المتدرج (حتى سرعة عالية جدًا) ومزايا أخرى.
إنه أصغر نسبيًا من محرك DC بالفرشاة، والتحكم فيه بسيط من محرك التيار المتردد غير المتزامن، وعزم الدوران المبدئي ذو سعة تحميل زائدة كبيرة، أما بالنسبة للعيوب ...... فهي أغلى من الفرشاة، وصيانة سيئة.
2. محرك DC - مبدأ التحكم في السرعة
تنظيم سرعة المحرك التعريفي بالتيار المستمر: يسمى تنظيم السرعة ، أي بضبط سرعة المحرك للحصول على عزم الدوران المطلوب.
محرك تيار مستمر مغناطيسي دائم عن طريق ضبط الجهد ومقاومة السلسلة وتغيير الإثارة يمكن أن تكون السرعة ، لكن تعديل الجهد الفعلي هو الأكثر ملاءمة والأكثر استخدامًا ، وهو الاستخدام الرئيسي لتنظيم سرعة PWM.
PWM هو في الواقع من خلال مفتاح عالي السرعة لتحقيق تنظيم جهد التيار المستمر ، دورة ، فتح لفترة طويلة ، متوسط الجهد مرتفع ، متوقف لفترة طويلة ، متوسط الجهد منخفض ، مناسب جدًا للضبط ، طالما أن المفتاح السرعة طالما كانت سرعة التحويل سريعة بدرجة كافية ، فإن توافقات الشبكة تكون أقل ، والتيار أكثر استمرارية.
ومع ذلك ، فإن الفرشاة والمبدل تآكل لفترة طويلة ، وفي نفس الوقت هناك تغيير كبير في التيار أثناء التبديل ، والذي من السهل جدًا إنتاج شرارات.
يحد المبدل والفرش من قدرة وسرعة المحرك الحثي DC ، مما يجعل تنظيم سرعة المحرك الحثي DC يفي بضيق.
بالنسبة للمحرك الحثي DC بدون فرش ، يتحكم التحكم في السرعة فقط بجهد الإدخال على السطح.
لكن نظام التحكم في التردد ذاتي التحكم في المحرك (محرك DC بدون فرش نفسه يأتي مع كاشف موضع الدوار وجهاز اكتساب إشارة موضع الدوار الآخر، باستخدام إشارة موضع الدوار لهذا الجهاز للتحكم في لحظة تغيير طور جهاز التحكم في تردد الجهد المتغير) يتحكم تلقائيًا التردد وفقًا للجهد المتغير، وهو تقريبًا نفس محرك التيار المستمر (المصقول)، مريح للغاية. مريحة للغاية.
نظرًا لأن الدوار يستخدم مغناطيسًا دائمًا ، ولا يوجد ملف إثارة خاص ، في حالة نفس السعة ، يكون المحرك أصغر ، وأخف وزنًا ، وأكثر كفاءة ، وأكثر إحكاما ، وتشغيلًا أكثر موثوقية ، وأداء ديناميكي أفضل ، في قيادة المركبات الكهربائية والجوانب الأخرى تم استخدامها على نطاق واسع.
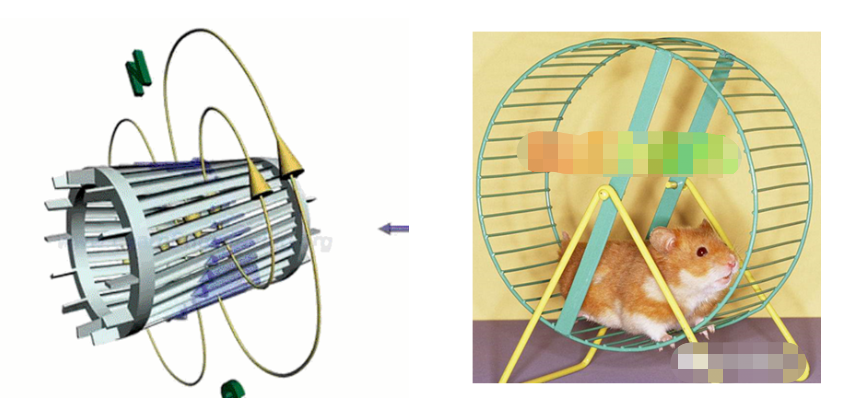
3. محركات التيار المتردد ثلاثية الطور - محركات غير متزامنة
تنقسم محركات التيار المتردد إلى محركات متزامنة ومحركات غير متزامنة ، وتستخدم المحركات المتزامنة في الغالب في المولدات وتستخدم المحركات غير المتزامنة في الغالب في المحركات الكهربائية. هم محرك تحريضي قفص السنجاب.
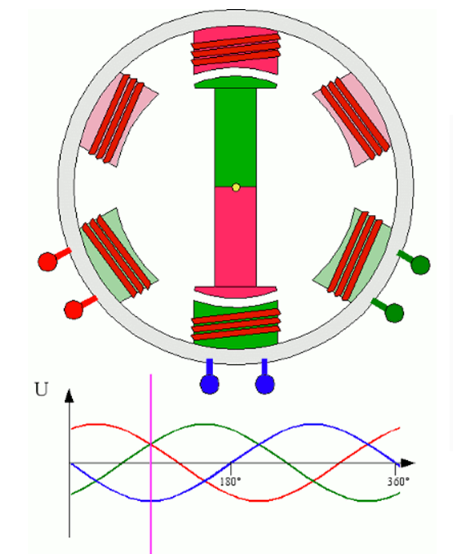
إن غلاف المحرك هو الجزء الثابت ، وهناك ثلاث لفات متناظرة للتيار المتردد على الجزء الثابت.
مع تغير تسلسل المراحل الثلاث ، يتم تشكيل حقل مغناطيسي اصطناعي دوار ، وتكون سرعة دوران المجال المغناطيسي هي السرعة المتزامنة.
السرعة المتزامنة n = 60f / p ، f هي التردد ، p هو عدد أزواج القطب ، على سبيل المثال ، لمحرك ثنائي القطب متصل بالشبكة الوطنية 50 هرتز (أي عدد أزواج القطب هو زوج واحد) ، ثم السرعة ن = 60 * 50/1 = 3000 لفة / دقيقة.
وبالمثل ، فإن السرعة المتزامنة للمحركات ذات 4 أقطاب و 6 أقطاب و 8 أقطاب هي 1500 و 1000 و 750.
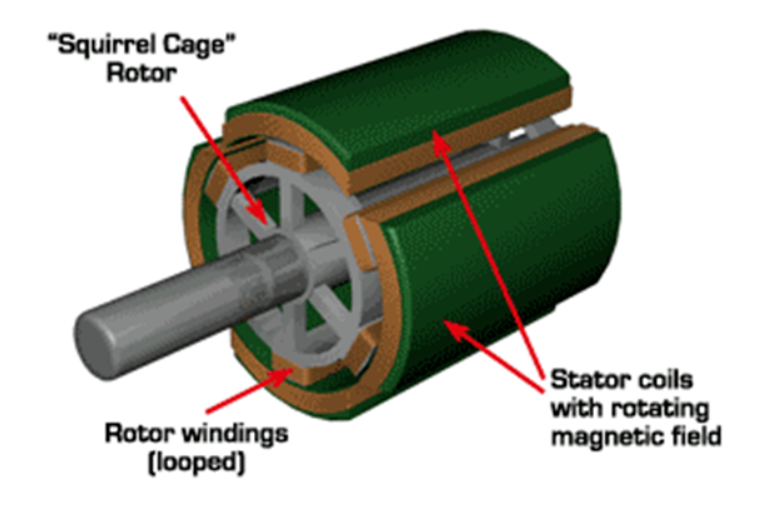
تتميز المحركات غير المتزامنة بآلية بسيطة بدوار ملف مغلق ، مثل نوع قفص السنجاب.
سيقطع الملف الدوار المجال المغناطيسي الدوار لتوليد الجهد الكهربائي المستحث ، والذي بدوره يولد التيار المستحث ، وأخيراً المجال المغناطيسي الدوار.
بحيث يصبح الدوار مغناطيسًا كهربائيًا وسيتبع دوران المجال المغناطيسي للجزء الثابت ، لذلك يجب أن تكون سرعة الدوار < المجال المغناطيسي الدوار للجزء الثابت ، وذلك لقطع خطوط الحث المغناطيسي.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
أي السرعة غير المتزامنة للدوار <السرعة المتزامنة ، هناك فرق في السرعة بين المجال المغناطيسي الدوار والجزء الثابت ، لذلك يطلق عليه اسم المحرك غير المتزامن.
تختلف السرعة المقدرة للمحرك غير المتزامن اختلافًا طفيفًا من مصنع لآخر ، حوالي 2800 + ص / دقيقة لمحرك ثنائي القطب ، 1400 + ، 950 + ، 700 + لأربعة أقطاب ، 6 أقطاب و 8 أقطاب غير متزامنة.
تكون سرعة المحرك غير المتزامن عالية في حالة عدم وجود حمل ، وتنخفض عند وجود حمولة.
يتميز المحرك غير المتزامن بهيكل بسيط ، وسهولة الصيانة ، والتشغيل الموثوق به ، والسعر الرخيص ، لذلك فهو مستخدم على نطاق واسع.
4. محركات التيار المتردد ثلاثية الطور - محركات متزامنة
محرك متزامن.
إذا تركت سرعة الدوار = سرعة دوران المجال المغناطيسي للجزء الثابت ، فإنها تصبح محركًا متزامنًا ، في هذا الوقت من الضروري تحويل الجزء الثابت إلى مغناطيس كهربائي أو مغناطيس دائم ، أي لتنشيط الجزء الثابت ، في هذا الوقت لم تعد هناك حاجة لقطع خط الحث المغناطيسي يمكن أن تدور ، وسرعة الدوران وسرعة دوران المجال المغناطيسي هي نفسها ، أي تشكيل محرك متزامن.
هيكل الدوار للمحرك المتزامن أكثر تعقيدًا من المحركات غير المتزامنة ، والأسعار المرتفعة ، في عمر الإنتاج لا يستخدم على نطاق واسع مثل المحركات غير المتزامنة ، ويستخدم بشكل أساسي كمولدات ، والآن محطات الطاقة الحرارية ، ومحطات الطاقة الكهرومائية ، والتوربينات البخارية ، والتوربينات الهيدروليكية هي في الأساس محركات متزامنة.
5. محرك AC ثلاثي الطور - تنظيم سرعة المحركات الكهربائية غير المتزامنة
تنظيم سرعة المحرك غير المتزامن: نظريًا ، التحكم في المحرك غير المتزامن بتردد التيار المتردد أو الجهد أو مقاومة الدوار ، يمكن أن يكون توزيع عمود المحرك تنظيمًا للسرعة ، ولكن من الناحية العملية لتحقيق تنظيم السرعة اللانهائي باستخدام طريقة ضبط التردد والجهد لتحقيقه.
نظرًا لأن نطاق سرعة تنظيم الجهد ليس كبيرًا ، لا يمكن استخدامه بشكل عام إلا في متطلبات التحكم في السرعة ليست مناسبات عالية ، والتطبيق ليس واسع الانتشار.
تنظيم سرعة التردد المتغير: عند الحديث عن التردد ، ربما سمعنا عنه.
الاسم الكامل لتحويل التردد هو التردد المتغير للجهد المتغير (VVVF) ، مما يعني أن الجهد يتغير عند تغيير التردد ، بحيث يكون نطاق سرعة المحرك غير المتزامن كبيرًا بدرجة كافية.
يمكن تقسيم محولات التردد إلى فئتين رئيسيتين: محولات التردد AC-AC ومحولات التردد AC-DC.
العاكس AC-DC: يتم تحويل طاقة التيار المتردد مباشرة إلى طاقة تيار متردد بتردد آخر بواسطة إلكترونيات الطاقة.
لا يمكن أن يتجاوز الحد الأقصى لتردد الخرج نصف تردد الإدخال ، لذلك يتم استخدامه بشكل عام فقط في الأنظمة ذات السرعة المنخفضة والسعة العالية ، ويمكن أن يلغي الحاجة إلى مخفض التروس الضخم.
سيعمل عاكس التيار المتردد AC-DC على تصحيح طاقة التيار المتردد إلى تيار مستمر أولاً ، ثم تحويلها إلى تيار متردد بتردد وجهد يمكن التحكم فيهما من خلال العاكس ، باستخدام تقنية PWM ، يمكن لهذا النوع من العاكس تحقيق نطاق واسع من الجهد والتردد المتغير.
بالنسبة للسيارات الكهربائية ، يكون المحرك غير المتزامن متينًا ، وقدرة تحميل زائدة قوية ، وخوارزمية التحكم ناضجة جدًا بحيث يمكن استخدامها بالكامل.
6. محرك AC ثلاثي الطور - تنظيم سرعة المحرك المتزامن
تنظيم سرعة المحرك المتزامن:
الآلات المتزامنة ليس لها معدل دوران ، ولا يمكن لجهد التحكم تغيير السرعة عند تحديد الهيكل ، لذلك قبل ظهور محولات التردد ، كانت المحركات المتزامنة غير منظمة تمامًا.
إن ظهور محول التردد يجعل المحرك المتزامن AC لديه أيضًا نطاق تنظيم سرعة ضخم ، لأن دواره لديه أيضًا إثارة مستقلة (مغناطيس دائم أو إثارة كهربائية) ، ونطاق تنظيم السرعة الخاص به أوسع من نطاق المحرك غير المتزامن ، والمحرك المتزامن لديه أعطيت حياة جديدة.
يمكن تقسيم نظام التحكم في سرعة التردد المتغير المتزامن للمحرك المتزامن إلى تحكم آخر في السرعة المتغيرة يتم التحكم فيه والتحكم الذاتي في السرعة المتغيرة.
بالنسبة لتنظيم سرعة التردد المتغير الخاضع للتحكم الآخر ، فهو مشابه لتنظيم التردد المتغير للمحرك غير المتزامن ، والذي يمكن التحكم فيه بواسطة SVPWM وطرق التحكم الأخرى وفقًا لنموذجها الرياضي ، وأداؤه أفضل من أداء المحرك غير المتزامن AC العادي.
يستخدم المحرك المتزامن العاكس الذي يتم التحكم فيه ذاتيًا ليكون له مجموعة متنوعة من الأسماء في عملية التطوير ، مثل محرك بدون مفتاح ؛ عند استخدام مغناطيس دائم وإدخال موجة جيبية ثلاثية الطور ، يمكن أن يطلق عليه محرك متزامن مغناطيسي دائم ذو موجة جيبية ؛ وإذا تم إدخال موجة مربعة ، فيمكن تسميتها بمحرك متزامن مغناطيسي دائم شبه منحرف ، نعم ، إنه مشابه لآلة DC بدون فرش (BLDM) ، لا نشعر بدائرة كبيرة من الراب قد تحولت إلى الوراء ، لكنك يجب أن يكون لديك الآن فهم أعمق للسرعة المتغيرة ، لذلك محرك DC بدون فرش عند استخدام إدخال التيار المستمر ، ولكن استخدام تقنية تحويل تردد المحرك المتزامن (نفس بنية المحرك المتزامن للمغناطيس الدائم) ، في الموديل 3 على استخدام محرك DC بدون فرش .
7. محرك غير متزامن AC أحادي الطور - محرك متحمس من سلسلة AC أحادي الطور (فرشاة)
محرك متحمس من سلسلة AC أحادي الطور ، والمعروف باسم المحرك المتسلسل أو المحرك العالمي (الاسم الأجنبي UniversalMotor ، الذي سمي بسبب AC و DC العالمي) ، يتم توصيل لفائف المحرك ولف الإثارة في سلسلة للعمل معًا.
يُطلق على المحرك المتحرك من سلسلة أحادية الطور أيضًا محرك متحمس من سلسلة AC-DC ثنائي الاستخدام ، والذي يمكن أن يعمل إما مع طاقة التيار المتردد أو طاقة التيار المستمر.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
تتمثل مزايا المحرك أحادي الطور المتسلسل في أنه يتمتع بسرعة عالية ، وعزم دوران عالي ، وصغر الحجم ، وخفيف الوزن ، وليس من السهل منع الدوران ، ومجموعة واسعة من الجهد المطبق ، ويمكن تنظيم السرعة من خلال طريقة تنظيم الجهد. ، وهو أمر بسيط وسهل التحقيق.
لذلك ، فهي تستخدم على نطاق واسع في الأدوات الكهربائية ، مثل جلاخة الزاوية ، المثقاب اليدوي ، إلخ.
هيكل المحرك أحادي الطور متشابه للغاية مع محرك سلسلة DC ، والفرق الرئيسي هو أن الجزء الثابت للمحرك أحادي الطور من سلسلة أحادي الطور يجب أن يكون مصنوعًا من السيليكون المصفح ، في حين أن الأقطاب المغناطيسية يمكن تصنيع DC من هيكل مصفح ومتكامل.
تنظيم سرعة المحرك أحادي الطور ، معظم الطرق المستخدمة لضبط الجهد ، هو تغيير الجهد الكهربائي.
تستخدم طريقة تنظيم الجهد للمحرك أحادي الطور المتسلسل تنظيم جهد تحويل الطور المتحكم فيه ، والذي يستخدم جهد الزناد في SCR للتخلف عن جهد الدخل لتحقيق مشغل تحويل الطور لجهد الدخل.
هناك طرق للأجهزة والبرامج في التنفيذ.
تتميز طريقة الجهد المنظم ، باستخدام تقنية التحكم في السرعة بالسيليكون ، بخط بسيط ، وحجم صغير للمكونات وخصائص أخرى لطريقة بسيطة وفعالة يتم التحكم فيها من السيليكون
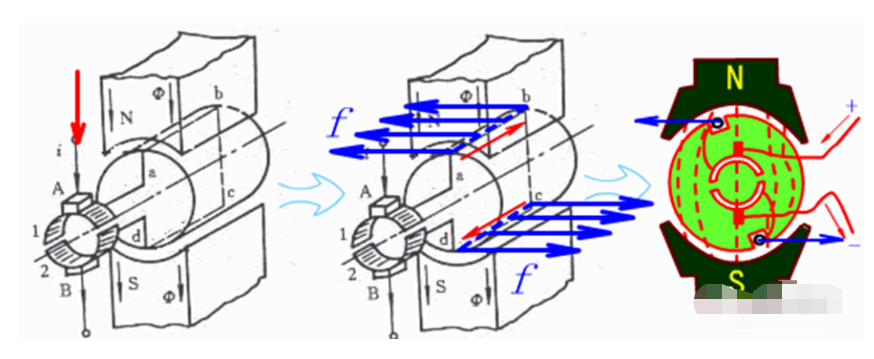
(أ) منحنى تغير التيار المتردد ؛
(ب) اتجاه دوران الجزء المتحرك عندما يكون التيار موجب نصف الموجة
(ج) اتجاه دوران الجزء المتحرك عندما يكون التيار نصف موجي سالب

8. محرك AC غير متزامن أحادي الطور - محرك قفص سنجابي AC أحادي الطور (بدون فرش)
ينتج تيار أحادي الطور عبر ملف المحرك مجالًا مغناطيسيًا نابضًا بدلاً من مجال مغناطيسي دوار ، لذلك لا يمكن بدء تشغيل المحركات أحادية الطور غير المتزامنة ذاتيًا.
لحل مشكلة البداية ، غالبًا ما يتم تصنيع المحركات غير المتزامنة أحادية الطور التي تعمل بالتيار المتردد لتكون ذات مرحلتين.
يتم تشغيل اللف الرئيسي مباشرة بواسطة مزود الطاقة أحادي الطور ؛ يختلف الملف الثانوي مكانيًا عن الملف الرئيسي بمقدار 90 درجة (زاوية كهربائية ، تساوي الزاوية الميكانيكية مقسومة على عدد أزواج قطب المحرك).
يتم توصيل الملف الثانوي بمصدر طاقة تيار متردد أحادي الطور بعد توصيل متسلسل للمكثف أو المقاوم ، بحيث يكون للتيار الذي يمر عبره والتيار في الملف الرئيسي فرق طور معين.
هذا يجعل المجال المغناطيسي الاصطناعي مجالًا دوارًا بيضاويًا ، أو ربما قريبًا من حقل دوار دائري.
وبالتالي يحصل المحرك على عزم بدء التشغيل.
المحرك الذي يستخدم طريقة فصل طور المقاومة غير مكلف ، على سبيل المثال ، يمكن لف الملف الثانوي بسلك أرق ، لكن تأثير فصل الطور ضعيف ويتم استهلاك الطاقة في المقاومة.
بعد بدء تشغيل المحرك ووصوله إلى سرعة معينة ، يتم عادةً إزالة الملف الثانوي تلقائيًا بواسطة مفتاح طرد مركزي مركب على عمود المحرك لتقليل الخسائر المقاومة وتحسين كفاءة التشغيل.
يتم استخدامه بشكل عام للمناسبة التي لا تكون فيها متطلبات عزم الدوران عالية ، مثل مخرطة صغيرة ، وثلاجة صغيرة ، وما إلى ذلك. العيب هو أن السرعة لا يمكن تعديلها.
من الممكن جعل المجال المغناطيسي الاصطناعي للمحرك قريبًا من المجال المغناطيسي الدائري الدائري في نقطة عمل معينة للمحرك ، وذلك للحصول على خصائص عمل أفضل.
من أجل جعل المحرك غير المتزامن ذي المرحلة المنقسمة يحصل على أداء بدء أفضل أو خصائص تشغيل أفضل أو كليهما ، تختلف السعة (مقدار القيمة) المطلوبة ويمكن تقسيمها إلى ثلاثة أنواع
9. محركات السائر - محركات السائر ذات الحلقة المفتوحة
محركات السائر (الحلقة المفتوحة) عبارة عن محركات ذات حلقة مفتوحة يتم التحكم فيها وتحول إشارات النبضات الكهربائية إلى إزاحات زاويّة ، وهي مستخدمة على نطاق واسع للغاية.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
يمكن التحكم في عدد النبضات للتحكم في مقدار الإزاحة الزاوية ، وذلك لتحقيق الغرض من تحديد المواقع بدقة ؛ في نفس الوقت ، يمكن التحكم في تردد النبض للتحكم في سرعة وتسريع دوران المحرك ، وذلك لتحقيق الغرض من تنظيم السرعة.
المحرك السائر هو نوع من المحركات الحثية ، التي تعمل باستخدام دائرة إلكترونية ، أي محرك ، لتحويل طاقة التيار المستمر إلى تيار تحكم في التوقيت متعدد الأطوار يعمل بنظام مشاركة الوقت.
على الرغم من أن محركات السائر يتم تشغيلها بواسطة تيار مستمر ، إلا أنه لا يمكن فهمها على أنها محركات تيار مستمر ، وهي محركات طاقة تعمل على تحويل الطاقة الكهربائية للتيار المستمر إلى طاقة ميكانيكية ، بينما المحركات السائر هي محركات تحكم ذات حلقة مفتوحة تحول إشارات النبضات الكهربائية إلى إزاحة زاويّة.
10. محرك السائر - مقارنة مضاعفات السائر
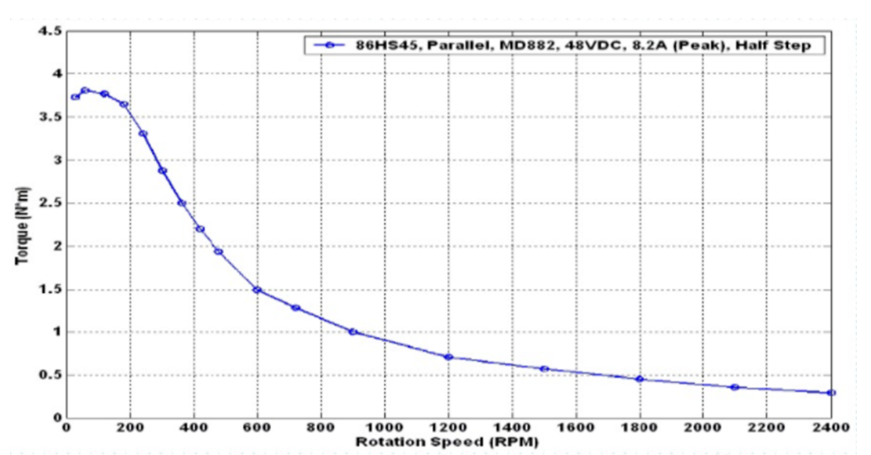
لاحظ أن المحركات السائر تستخدم في التطبيقات ذات السرعة المنخفضة - لا تزيد عن 1000 دورة/دقيقة في الدقيقة، وأفضل نطاق عمل هو 150~500 دورة/دقيقة، (حلقة مغلقة تصل إلى 1500).
محرك متدرج ثنائي الطور عند 60 ~ 70r / min عرضة لظاهرة الرنين منخفضة السرعة ، وتوليد الاهتزاز والضوضاء ، والتي يجب تجنبها عن طريق تغيير نسبة التخفيض ، وزيادة الكسر الدقيق ، وإضافة مخمدات مغناطيسية ، إلخ.
احتياطات دقة التقسيم الفرعي ، عندما يكون مستوى التقسيم الفرعي أكبر من 4 ، لا يمكن ضمان دقة زاوية الخطوة ، متطلبات الدقة العالية ، فمن الأفضل التبديل إلى مراحل أكثر (أي زاوية خطوة أصغر) لمحرك السائر أو مغلق- حلقة السائر ، محرك سيرفو.
(حلقة مفتوحة) محرك متدرج ومحرك مؤازر 7 مختلف.
دقة التحكم - يمكن ضبط دقة التحكم في محرك سيرفو وفقًا لجهاز التشفير، ودقة أعلى.
ب خصائص التردد المنخفض - محركات السائر معرضة للاهتزاز عند الترددات المنخفضة، أما المحركات المؤازرة فلا تتعرض لذلك.
خصائص التردد اللحظي - يصبح عزم دوران المحرك السائر أصغر مع زيادة السرعة، لذا فإن سرعة التشغيل القصوى تكون عمومًا في <1000r / min ، محرك سيرفو في السرعة المقدرة (بشكل عام 3000r / min) يمكنه إخراج عزم الدوران المقدر ، في السرعة المقدرة أعلى من خرج الطاقة الثابت ، والسرعة القصوى تصل إلى 5000 دورة / دقيقة ؛.
D سعة التحميل الزائد - لا يمكن تحميل محرك السائر بشكل زائد، ويمكن تحميل أقصى عزم دوران للمحرك المؤازر 3 مرات.
أداء التشغيل E - محرك متدرج للتحكم في الحلقة المفتوحة، ومحرك مؤازر عند التحكم في الحلقة المغلقة.
استجابة السرعة F - وقت بدء تشغيل المحرك المتدرج 0.15 ~ 0.5 ثانية، محرك مؤازر 0.05 ~ 0.1، أسرع 0.01 ثانية للوصول إلى تصنيف 3000 دورة / دقيقة.
مؤشرات كفاءة G - كفاءة محرك السائر حوالي 60%، محرك سيرفو حوالي 80%.
في الاستخدام الفعلي سوف تجد: محرك سيرفو غالي الثمن ، باهظ الثمن من بين العديد ، لذلك تستخدم المحركات المتزامنة على نطاق واسع ، خاصة في متطلبات دقة تحديد المواقع ليست عالية جدًا محرك الحزام المتزامن ، وناقل الحزام المسطح ومناسبات أخرى غالبًا ما تستخدم محرك السائر.
11. محركات السائر - محركات السائر ذات الحلقة المغلقة
محركات السائر ذات الحلقة المغلقة: بالإضافة إلى محركات السائر ذات الحلقة المفتوحة ، هناك محركات متدرجة تحتوي على مشفر مضاف إلى نهاية المحرك ، مما يسمح بالتحكم في الحلقة المغلقة.
يستخدم التحكم في الحلقة المغلقة لمحركات السائر ردود فعل الموقع و / أو التغذية المرتدة للسرعة لتحديد انتقالات الطور المناسبة لموضع الدوار ، والتي يمكن أن تحسن أداء محركات السائر بشكل كبير.
أنظمة مؤازرة بدون ظواهر خارج الخطوة.
مزايا محركات السائر ذات الحلقة المغلقة.
1. استجابة عالية السرعة. بالمقارنة مع المحركات المناسبة ، فإن محرك الخطوة المغلقة لديه متابعة قوية جدًا لأوامر تحديد المواقع ، وبالتالي فإن وقت تحديد الموقع قصير جدًا. في تطبيق البدء / الإيقاف المتكرر ، يمكن تقصير وقت تحديد المواقع بشكل كبير.
2. توليد عزم دوران أكثر من المؤازرة العادية. تعويض عدم فقدان الخطوة والاهتزاز المنخفض السرعة لنظام السائر العادي.
3. يمكن توليد عزم دوران عالي حتى تحت حمولة بنسبة 100٪ ، دون فقدان عملية الخطوة ، دون اعتبار فقدان عزم الدوران ومشاكل أخرى مثل أنظمة التدرج العادية.
4. من خلال تطبيق محرك الحلقة المغلقة ، يمكن زيادة الكفاءة إلى 7.8 مرة ، ويمكن زيادة طاقة الإخراج إلى 3.3 مرة ، ويمكن زيادة السرعة إلى 3.6 مرة.
يمكن أن تحصل على سرعة تشغيل أعلى ، وأكثر استقرارًا وسرعة أكثر سلاسة من التحكم في الحلقة المفتوحة.
5. سيكون محرك السائر ثابتًا تمامًا عند توقفه ، بدون ظاهرة الاهتزازات الدقيقة للمؤازرة العادية.
يمكن أن يحل محل تطبيق نظام المؤازرة للأغراض العامة عندما تكون التكلفة المنخفضة والدقة العالية مطلوبة.
12. محرك السائر - مقارنة مؤازرة السائر ذات الحلقة المغلقة
تعمل محركات السائر ذات الحلقة المغلقة تلقائيًا على ضبط حجم التيار المتعرج وفقًا لحجم الحمل والحرارة والاهتزاز أقل من السائر ذو الحلقة المفتوحة ، وهناك ردود فعل مشفرة وبالتالي تكون الدقة أعلى من محركات السائر العادية ، واستجابة المحرك من الحلقة المفتوحة السائر أبطأ من المحركات المؤازرة بشكل أسرع ، هناك خطأ في الموضع أثناء التشغيل ، وسوف ينخفض الخطأ تدريجياً في ميلي ثانية بعد توقف الأمر.
عزم دوران عالي السرعة من السائر ذو الحلقة المفتوحة ، التطبيقات الشائعة في مناسبة 0-1500 دورة في الدقيقة.
باختصار: محرك متدرج مغلق الحلقة بتكلفة منخفضة ، وكفاءة عالية ، ولا اهتزازات ، ولا توقف اهتزازات دقيقة ، وصلابة عالية ، ولا تصحيح ، وسرعة عالية ، واستجابة ديناميكية عالية ، وما إلى ذلك ، هو استبدال أنظمة مؤازرة عالية التكلفة ، أنظمة السائر ذات الحلقة المفتوحة المنخفضة وغيرها من الحلول الفعالة من حيث التكلفة
13. محرك سيرفو - محرك سيرفو عام
يمكن للمحرك المؤازر (محرك سيرفو) ، الذي يُطلق عليه أيضًا محرك المشغل ، أن يجعل سرعة التحكم ودقة الموضع دقيقة للغاية ، ويمكنه تحويل إشارة الجهد إلى عزم دوران وسرعة لدفع كائن التحكم.
على عكس الهيكل الأساسي للمحرك المتدرج ، فإن المحرك المؤازر هو محرك DC قياسي أو محرك تحريضي AC لأنه يتم وضع دائرة التحكم خارج المحرك والجزء المحرك بالداخل.
يعتمد محرك سيرفو على نبضات لتحديد المواقع. عندما يستقبل محرك سيرفو نبضة واحدة ، فإنه يدور بزاوية تقابل نبضة واحدة.
في كل مرة يدور فيها المحرك بزاوية ، سيرسل المشفر العدد المقابل من نبضات التغذية الراجعة. تشكل نبضات التغذية الراجعة والنبضات التي يتلقاها سائق المؤازرة تحكمًا مغلقًا الحلقة ، بحيث يمكن لمحرك المؤازرة التحكم في دوران المحرك بدقة شديدة لتحقيق تحديد الموضع بدقة.
التحكم في المحرك المؤازر: بشكل عام ، يتم التحكم في المحركات المؤازرة للاستخدام الصناعي من خلال ثلاث حلقات ، وهي الحلقة الحالية وحلقة السرعة وحلقة الموضع ، والتي يمكنها تغذية التسارع الزاوي والسرعة الزاوية والموقف الدوراني لتشغيل المحرك على التوالي.
تتحكم الشريحة في تيار القيادة لكل مرحلة من مراحل المحرك من خلال ردود الفعل الثلاثة ، بحيث يمكن تشغيل سرعة وموضع المحرك بدقة كما هو مقرر.
تتميز مؤازرة التيار المتردد بعزم دوران ثابت تحت السرعة المقدرة ، 200 واط ، 400 واط منخفضة ومتوسطة القصور الذاتي ، سرعة مؤازرة التيار المتردد هي 3000 دورة في الدقيقة ، وأعلى سرعة هي 5000 دورة في الدقيقة ، وسرعة عالية.
يتناسب عزم الدوران مع التيار ، لذلك يمكن أن يعمل في وضع عزم الدوران ، مثل مسامير التثبيت ، ومحطات الضغط وغيرها من المناسبات التي تحتاج إلى عزم دوران ثابت.
ضجيج عمل أجهزة التيار المتردد والاهتزازات صغيرة جدًا ، وتوليد حرارة منخفضة.
نفس الحجم من القصور الذاتي للمحرك الدوار صغير ، 400 واط معزز بالقصور الذاتي يعادل فقط القصور الذاتي للدوار لمحرك متدرج 57 قاعدة 2NM.
لدى المؤازرة سعة تحميل زائد لوقت قصير ، يحتاج الاختيار إلى مراعاة مضاعف الحمل الزائد للمحرك عند التسارع والتباطؤ.
تستخدم المؤازرة التحكم في الحلقة المغلقة ولها نفس خطأ تتبع الموضع مثل محرك الخطوة المغلقة.
يتطلب المؤازرة التكليف قبل الاستخدام.
لا يكفي العزم الأصلي لمحرك السائر والمحرك المؤازر ، وغالبًا ما يحتاج إلى العمل مع المخفض ، ويمكنك استخدام مجموعة تروس التخفيض أو المخفض الكوكبي.
6. محرك سيرفو - سيرفو
Servo هي فئة من محركات DC المؤازرة ، تم استخدامها لأول مرة لنماذج الطائرات الصغيرة وتستخدم الآن لمفاصل الروبوت الصغيرة.
من التحليل الهيكلي ، تتكون المؤازرة من محرك DC صغير ، بالإضافة إلى أجهزة الاستشعار ، ورقائق التحكم ، ومجموعات تروس التخفيض ، والتي يتم تركيبها في مبيت متكامل.
إنه قادر على التحكم في زاوية الدوران من خلال إشارة الدخل (عادة إشارة PWM ، ولكن أيضًا إشارة رقمية).
نظرًا لأنه نسخة مبسطة ، يتم تبسيط التحكم الأصلي ثلاثي الحلقات للمحرك المؤازر إلى حلقة واحدة ، أي تم اكتشاف حلقة الموضع فقط.
الحل الرخيص هو مقياس الجهد ، الذي يتم اكتشافه بواسطة المقاوم ، بينما يستخدم الحل المتقدم مستشعر هول أو جهاز تشفير.
الماكينات العامة غير مكلفة وصغيرة الحجم ، ولكنها ذات دقة منخفضة للغاية وقدرة على تهدئة الوضع السيئ ، ويمكن أن تلبي العديد من الاحتياجات المنخفضة.
مع ازدهار الروبوتات الصغيرة على مستوى المستهلك في العامين الماضيين ، أصبحت الماكينات الصغيرة والخفيفة الوزن على الفور أكثر مكونات المفصل ملاءمة.
ومع ذلك ، تتطلب مفاصل الروبوت أداءً أعلى بكثير من الماكينات الجوية ، وكمنتج تجاري تتطلب أيضًا أجهزة ذات جودة أعلى بكثير من مشغلات DIY.
مرحبًا بكم في مشاركتنا المزيد من المعلومات حول المحركات الكهربائية في منطقة التعليقات!
في حالة وجود أي استفسار حول المحرك الكهربائي ، يرجى الاتصال بالمحرك الكهربائي المحترف الصانع في الصين على النحو التالي:

يحتوي محرك Dongchun على مجموعة واسعة من المحركات الكهربائية التي تُستخدم في صناعات مختلفة مثل النقل والبنية التحتية والبناء.
احصل على رد سريع.






